一种基于数字孪生的制造车间多AGV无冲突路径调度方法
本发明涉及制造车间agv路径规划,特别涉及一种基于数字孪生的制造车间多agv无冲突路径调度方法。
背景技术:
1、agv路径规划是智能制造的一个关键过程。其主要工作是参照某一个参数的指标(如工作代价值最低,选择路径最短,运算时间消耗最短等),在任务区域选择出一条可从起点连接到终点的最优或次优的避障路径。然而,传统的移动机器人路径规划是基于有预设参照的导引技术实现的,类似于磁条导引等,但是机器人使用这类路径引导技术的话,只能在特定的路径上移动,如果车间环境发生变化,则磁条需要重新铺设,程序比较繁琐,智能化程度较低。而多机器人的路径规划是在单机器人路径规划的基础上,计算出一组多机器人从其当前位置到给定目的地的无冲突路径。在需要多台agv的场景中,每台agv的路径都是随机不确定的,从起始点到执行任务的终点可能会遇到障碍物,所以多机器人的路径规划需要考虑较多的约束。目前的研究方向都是主动式的冲突消除策略,包括启发式算法与时间窗结合的规划法、基于时空网络模型的规划法,都较为有效地消除了路径冲突,提升了多agv系统的路径执行效率。但是目前多agv路径规划的实际应用方法仍然屈指可数。申请(专利)号cn202211510638.0的发明,公开了一种agv路径规划方法,包括:设置agv的起点和目标点;在人工势场法原有斥力势场函数中添加关于目标点到当前点的影响函数,得到改进斥力势场函数;根据障碍物对agv的斥力和目标点对agv的引力计算agv所受到的合力,agv跟随合力方向进行路径搜索;路径搜索后到达下一位置点,判断agv是否到达目标点;若没有到达目标点,则判断agv是否陷入局部最小值;若agv陷入局部最小值,则引入模拟退火法到达下一位置点,迭代直到agv走出局部最小值处;若agv到达目标点,则保留路径。但是对于这样的生成的调度方法,存在着算法部署难、实验过程交互差以及潜在的安全风险等等特点,无法直观有效的对调度方法进行测试。
技术实现思路
1、为了克服上述现有技术的缺点,本发明的目的在于提供一种基于数字孪生的制造车间的多agv无冲突路径调度方法,包括对制造车间电子地图建模,设计单agv路径规划算法、路径协调器、冲突解决器、优先级规划器、整体算法框架以及搭建数字孪生agv调度验证平台等步骤;该方法采用主动式的消除冲突策略,解决了制造车间的实际冲突问题,提升了整个制造流程的效率。
2、为了实现上述目的,本发明采用的技术方法是:
3、一种基于数字孪生的制造车间多agv无冲突路径调度方法,包括以下步骤:
4、步骤1),对制造车间电子地图建模;首先,采用拓扑法建立制造车间模型,将车间重要区域用不同点位划分;然后根据agv的不同工况情况,设立特殊节点的点位;最后,在关键位置节点图的基础上,添加车间可行使区域的关键位置,获得面向多agv系统制造车间的电子地图;
5、步骤2),设计单agv路径规划算法;首先对于单个agv系统给定一个初始任务,单agv通过任务确定起始点和终点;接着以路径最短为优化目标规划从起点向终点进行节点搜索;最后得到可以完成任务的全局路径;
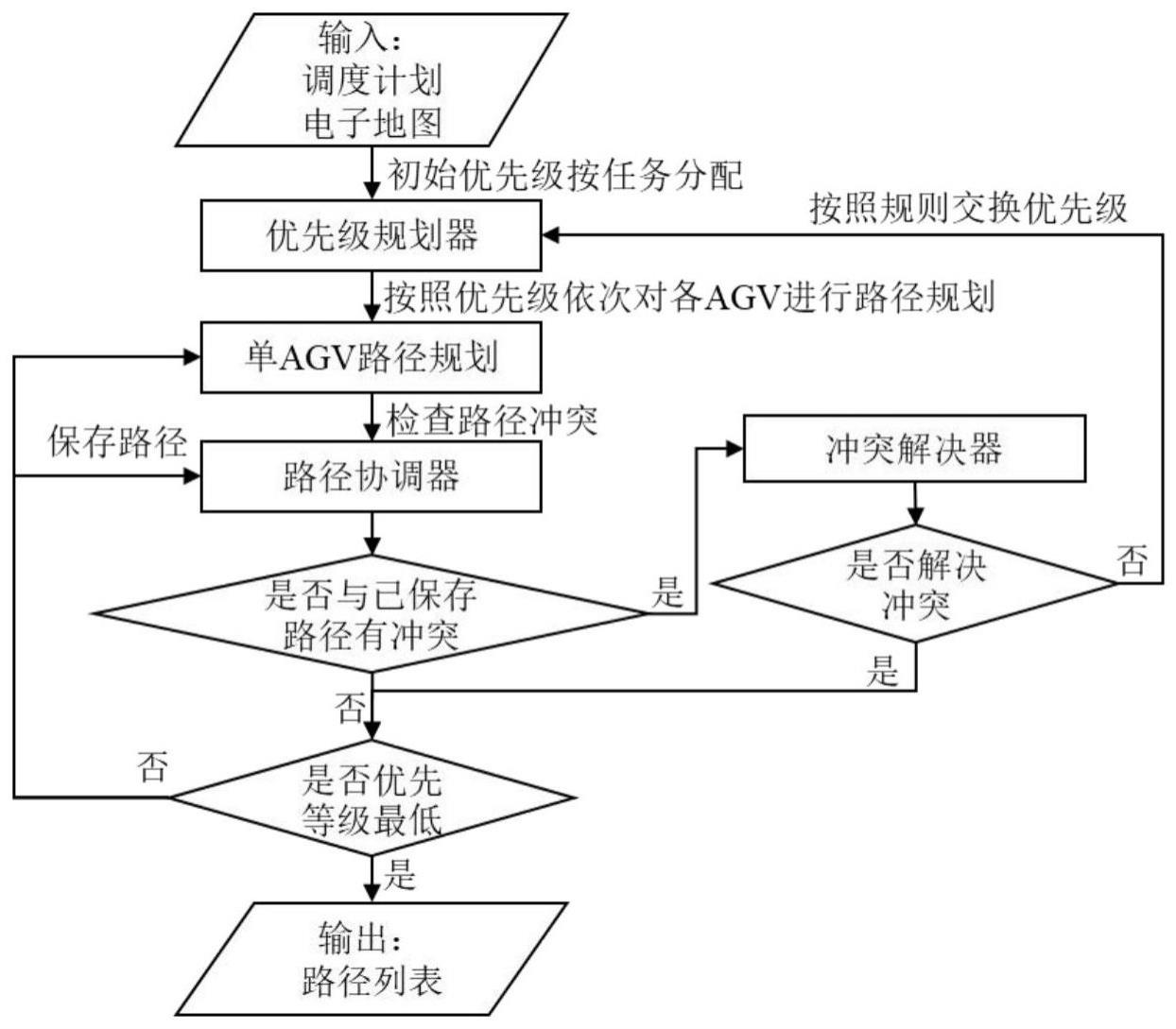
6、步骤3),设计整体算法框架,整体的算法框架包含路径协调器、冲突求解器、以及优先级规划器三个模块;确保各agv在执行任务的过程中以及前往下一个任务的过程中不会和其他agv之间产生冲突;
7、所述的路径协调器;首先路线协调器负责保存在单agv路径规划中已经计划好的路径候选对象,并限制新路径候选对象的生成;然后判断当前规划路径是否与已保存路径有冲突;最后设计数据结构,根据数据结构设计路径协调器中的冲突检测函数,检测特定时间点的给定节点与路径协调器中所有已保存的候选路径是否发生冲突;
8、所述的冲突解决器;为无法获得有效解决方法的场景解决冲突;
9、所述的优先级规划器;对初始的调度计划,优先级规划器按照订单任务在列表中的顺序分配agv的优先级,然后基于最多碰撞次数原则交换优先级,解决冲突解决器无法处理的冲突;
10、步骤4),搭建数字孪生agv调度验证平台;该平台主要由系统支撑服务、虚拟仿真平台和物理验证平台三部分组成;系统支撑服务的功能是提供任务分配算法以及路径规划算法支撑;虚拟仿真平台的功能是agv调度方法评估与任务执行过程可视化展示;物理验证平台的主要功能是在实际环境中评估调度方法的可行性,包括了agv物理实体和相应的地图环境。
11、与现有技术相比,本发明采用的以上技术方法具有以下优点:
12、(1)本发明步骤1和步骤2可以同时协调大规模数量的分布式agv,不需要集中控制系统。
13、(2)本发明步骤3利用优先规划和碰撞预防,显著地解决了一些之前无法解决的冲突场景,扩大了整个解决方法的应用范围。
14、(3)本发明步骤4利用数字孪生技术的优势,提出了仿真与物理验证同步互联的多agv测试平台,实现了agv开发测试全生命周期的多节点数据互通,并且可以实现在不移植算法的基础上进行实车验证,简化验证流程,缩短开发周期。
15、综上所述,本发明设计了基于车间电子地图的单agv路径规划算法,可以为单agv精确移动到目标点;设计了解决冲突的多agv调度算法,对于给定的调度方法,可以帮助车间中的多agv解决路径冲突问题,帮助各agv在车间环境中实现无冲突调度;设计了数字孪生的agv调度方法验证平台,通过可视化方法进行多agv冲突测试以及完整调度方法的执行测试;该方法采用主动式的消除冲突策略,解决了制造车间的实际冲突问题,提升了整个制造流程的效率。可以应用于真实的应用场景中,得到能够满足实际需求的方法,具有可行性。
技术特征:
1.一种基于数字孪生的制造车间多agv无冲突路径调度方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于数字孪生的制造车间多agv无冲突路径调度方法,其特征在于,步骤1)具体为:
3.根据权利要求1所述的一种基于数字孪生的制造车间多agv无冲突路径调度方法,其特征在于,步骤2)中:
4.根据权利要求3所述的一种基于数字孪生的制造车间多agv无冲突路径调度方法,其特征在于,步骤2)具体为:
5.根据权利要求1所述的一种基于数字孪生的制造车间多agv无冲突路径调度方法,其特征在于,步骤3)具体为:
6.根据权利要求1所述的一种基于数字孪生的制造车间多agv无冲突路径调度方法,其特征在于,步骤4)具体为:
技术总结
一种基于数字孪生的制造车间多AGV无冲突路径调度方法,包括制造车间电子地图模型建立、单AGV路径规划算法设计、整体算法框架设计以及搭建数字孪生AGV调度验证平台,本发明设计了基于车间电子地图的单AGV路径规划算法,可以为单AGV精确移动到目标点;设计了解决冲突的多AGV调度算法,对于给定的调度方法可以帮助车间中的多AGV解决路径冲突问题,帮助各AGV在车间环境中实现无冲突调度;设计了数字孪生的AGV调度方法验证平台,通过可视化方法进行多AGV冲突测试以及完整调度方法的执行测试;该方法采用主动式的消除冲突策略,解决了制造车间的实际冲突问题,提升了整个制造流程的效率。
技术研发人员:徐俊,杨健,韩文杰,汪义博,孙铮,梅雪松
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!