一种基于无人机的高速公路自动驾驶方法、装置及计算机系统与流程
本发明涉及汽车智能驾驶,特别是涉及一种基于无人机的高速公路自动驾驶方法、装置及计算机系统。
背景技术:
1、随着汽车智能化、电气化的推进,智能驾驶功能(adas/ad)已逐渐成为主流厂商的重点研发及技术投入领域。一般而言,oem及tier1选择的智能驾驶发展路径是自下而上的l2-l3-l4渐进式发展模式,目前主流车型配置的adas相关的功能主要有aeb和acc的纵向功能,lca、lka、elk等单车道横向控制功能,横纵向集成的ica智能领航辅助功能及多车道hwa-ml功能。但由于实际道路工况复杂多样性及搭载传感器的局限性,这些功能都需要在驾驶员持续介入的情况下使用,为l1-l3(不含l3)级功能,并未完全解放驾驶员。高速公路为oem开发l3及以上功能较为理想的驾驶场景,通过高精地图及车载传感器的感知融合,路径规划到决策执行完成车辆的自动驾驶。但由于车载传感器安装位置的局限,其探测的距离往往只有车辆周边的200m,同时还会受到周围车辆及障碍物遮挡影响,较大程度地减小本车的探测范围,不利于高速公路突发事件的识别。而且,目前车辆搭载的传感器多为摄像头及毫米波雷达,对天气依赖程度较高。
2、典型的案例一如图1所示,通过雷达+摄像头感知融合后,再在域控制器中进行轨迹规划和决策下,实现车辆的巡航、跟车、过弯及超车动作。
3、然而,这种配置最主要的问题在于:
4、1.雷达及摄像头安装位置局限,容易受周围车辆及障碍物影响而减小感知距离;
5、2.在进入交通枢纽等弯道较多的情况下,由于视野遮挡,只能感知前方较短距离的车辆,无法探测前方弯道内行驶的前方车辆及路况,存在一定的驾驶风险。
6、3.较难探测静止车辆及特殊车辆模型(如大型拖车等)。
7、4.同时受光线等天气条件影响较大。
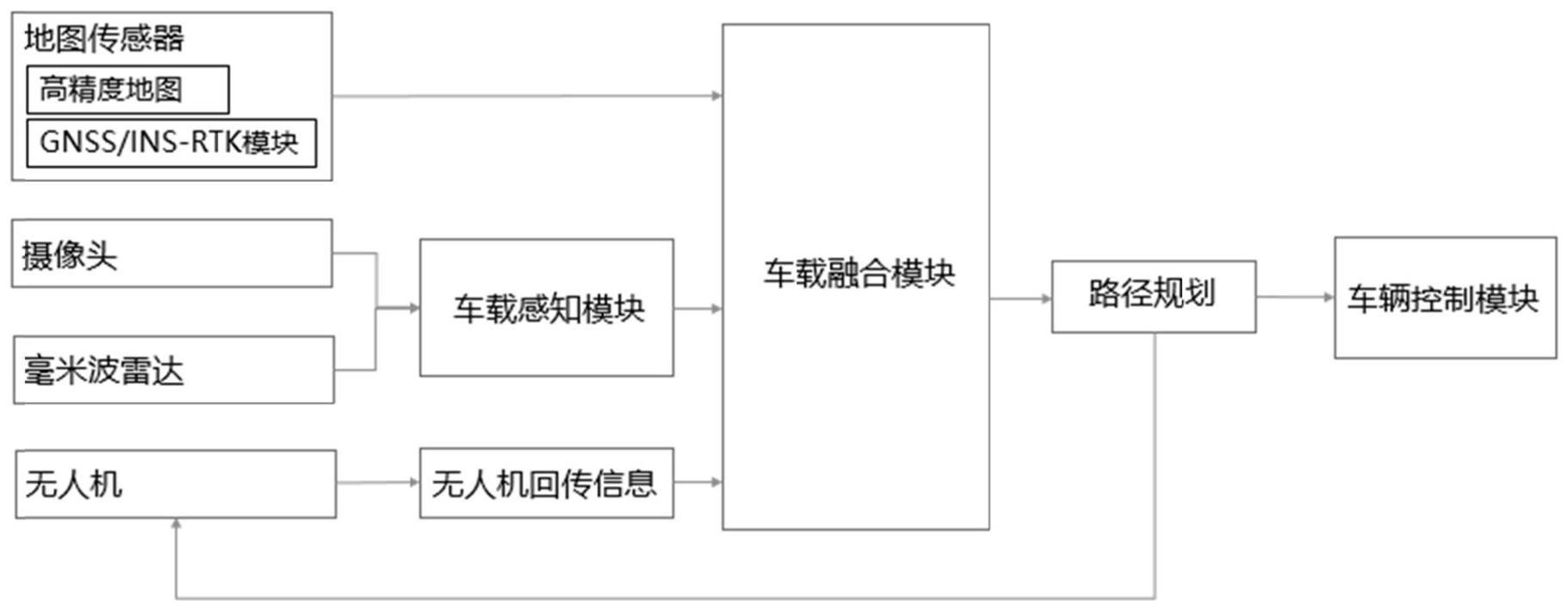
8、考虑到以上方案的不足,业内厂家又推出如图2所示的现有技术案例二,即通过雷达+摄像头,同时搭载高精度地图及gnss/ins-rtk模块,为高速公路自动驾驶提供感知融合、融合定位、路径规划及决策控制,体验感有了一定的提升。但是,相对于客户对自动驾驶技术的期许,其在并未解决前述技术大部分不足的情况下,还带来了新的问题:
9、1.雷达及摄像头安装位置局限,容易受周围车辆及障碍物影响而减小感知距离,较难应对高速公路前方的突发事故。
10、2.在进入交通枢纽等弯道较多的情况下,由于视野遮挡,只能感知前方较短距离的车辆,无法探测前方弯道内行驶的前方车辆及路况,存在一定的驾驶风险。
11、3.在进入山区高速或较长隧道时,gnss/ins及rtk信号较差,导致融合定位及地图匹配误差较大。
技术实现思路
1、本发明的目的是为了克服上述背景技术的不足,提供一种基于无人机的高速公路自动驾驶方法、装置及计算机系统,使其能够解决以下问题:
2、1.通过配备搭载激光雷达及摄像头无人机,可解决雷达及摄像头安装位置局限、只能安装在本车上、感知范围较小、远端障碍物识别不够、较难感知弯道中前方车辆及障碍物的情况;
3、2.对于高速静止车辆及特殊车辆(如大型拖车),现有技术往往不能识别或者识别错误的问题;
4、3.山区或者长隧道中,gnss/ins-rtk信号差,无法进行定位及融合定位的情况;
5、4.光线亮度发生突然变换等场景致盲的情况。
6、本发明提供的一种基于无人机的高速公路自动驾驶方法,包括如下步骤:车载感知:识别车辆周围环境,提供高精度地图及定位信息,同时识别无人机与本车的相对距离;无人机感知识别:用于识别前方目标;信息传递:用于无人机与本车间的信息传递;车载融合:融合车载传感器信息及无人机传回的感知信息,提供融合定位信息;策略处理:基于本车的路径规划及无人机传回信息对行驶路线进行调整,同时将行驶路线发送给无人机用于无人机飞行路线参考;车辆控制:根据策略处理步骤对车辆执行端进行控制,同时也会对无人机的释放及回收进行控制。
7、在上述技术方案中,所述车载融合步骤的具体过程如下:坐标转换:基于所有标定完善的传感器的感知数据:位姿信息、运动信息、形状信息,将其统一至车体坐标系;时间同步:采用统计学中的内插外推方法,以计算平台接收到无人机感知识别信号的时间戳为基准,将各类传感器相近时间戳的信号做补偿,预测时间戳时刻各类传感器的运动属性,即完成时间同步;目标匹配:计算各个传感器量测和上一周期全体目标的距离矩阵,采用匹配算法寻找传感器目标和当前航迹的完备匹配,根据关联门限的阈值筛选出关联成功的目标;状态更新:根据上一个目标匹配模块的结果,将系统状态进行更新;目标数据生成:通过构建目标存在概率的模型,来衡量航迹是否存在且稳定可靠,传送稳定存在、置信度高的全局航迹以便做策略处理。
8、在上述技术方案中,所述坐标转换步骤的具体过程如下:无人机传感数据转换:将无人机上各类传感器的各类测量数据通过坐标转换矩阵,转换成无人机坐标系的测量数据;相对位置坐标系转换:获取自车和无人机的相对位置,转换成车体坐标系的测量数据;所有数据坐标转换:将车体和无人机传感器测量的各类数据,通过坐标转换,成为车体坐标系的测量数据,完成空间同步。
9、在上述技术方案中,所述相对位置坐标系转换步骤中,自车和无人机根据mavlink协议获取自车和无人机的相对位置。
10、在上述技术方案中,所述所有数据坐标转换步骤中,所述车体和无人机传感器包括imu、地图传感器、摄像头、毫米波雷达和激光雷达。
11、在上述技术方案中,所述时间同步步骤中,补偿包括位姿补偿和运动状态补偿,其中,位姿补偿包括横摆角和横摆角速度,运动状态补偿包括位置、速度和加速度。
12、在上述技术方案中,所述目标匹配步骤中,所述匹配算法是卡尔曼滤波算法。
13、在上述技术方案中,所述状态更新步骤中,采取拓展卡尔曼滤波算法,对目标的运动状态进行更新和预测。
14、本发明又提供了一种基于无人机的高速公路自动驾驶装置,包括计算机程序,该计算机程序能够执行基于无人机的高速公路自动驾驶方法。
15、本发明还提供了一种计算机系统,该计算机系统包括基于无人机的高速公路自动驾驶装置。
16、本发明基于无人机的高速公路自动驾驶方法、装置及计算机系统,具有以下有益效果:
17、1、无人机作为车辆一种传感器,打破车载传感器位置局限性,极大提高车辆感知范围及感知精度;
18、2、能够较车载传感器提前获得前方路况,为车辆局部路径规划提供关键信息;
19、3、能够识别高速静止车辆及特殊车辆模型(如大型拖车)等特殊工况;
20、4、能用于山区或者长隧道中等gnss/ins-rtk信号的工况,通过对无人机激光雷达及摄像头感知信息融合可进行融合定位;
21、5、能解决光线亮度发生突然变换等场景的致盲情况。
技术特征:
1.一种基于无人机的高速公路自动驾驶方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的基于无人机的高速公路自动驾驶方法,其特征在于:所述车载融合步骤的具体过程如下:
3.根据权利要求2所述的基于无人机的高速公路自动驾驶方法,其特征在于:所述坐标转换步骤的具体过程如下:
4.根据权利要求3所述的基于无人机的高速公路自动驾驶方法,其特征在于:所述相对位置坐标系转换步骤中,自车和无人机根据mavlink协议获取自车和无人机的相对位置。
5.根据权利要求4所述的基于无人机的高速公路自动驾驶方法,其特征在于:所述所有数据坐标转换步骤中,所述车体和无人机传感器包括imu、地图传感器、摄像头、毫米波雷达和激光雷达。
6.根据权利要求5所述的基于无人机的高速公路自动驾驶方法,其特征在于:所述时间同步步骤中,补偿包括位姿补偿和运动状态补偿,其中,位姿补偿包括横摆角和横摆角速度,运动状态补偿包括位置、速度和加速度。
7.根据权利要求6所述的基于无人机的高速公路自动驾驶方法,其特征在于:所述目标匹配步骤中,所述匹配算法是卡尔曼滤波算法。
8.根据权利要求7所述的基于无人机的高速公路自动驾驶方法,其特征在于:所述状态更新步骤中,采取拓展卡尔曼滤波算法,对目标的运动状态进行更新和预测。
9.一种基于无人机的高速公路自动驾驶装置,包括计算机程序,其特征在于:该计算机程序能够执行如权利要求1~8所述的基于无人机的高速公路自动驾驶方法。
10.一种计算机系统,其特征在于:该计算机系统包括如权利要求9所述的基于无人机的高速公路自动驾驶装置。
技术总结
本发明公开了一种基于无人机的高速公路自动驾驶方法,步骤如下:车载感知:提供高精度地图及定位信息,同时识别无人机与本车的相对距离;无人机感知识别:识别前方目标;信息传递:无人机与本车间的信息传递;车载融合:融合车载传感器信息及无人机传回的感知信息,提供融合定位信息;策略处理:基于本车的路径规划及无人机传回信息对行驶路线进行调整,同时将行驶路线发送给无人机用于无人机飞行路线参考;车辆控制:对车辆执行端进行控制,同时也会对无人机的释放及回收进行控制。本发明还公开了一种基于无人机的高速公路自动驾驶装置和计算机系统。本发明具有探测范围广、观察不受客观环境影响的特点,可以广泛应用于汽车智能驾驶上。
技术研发人员:丁晨,余琛,程志勇
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!