评估自主驾驶规划和控制的方法和系统与流程
本公开的实施例一般涉及操作自主驾驶车辆。更具体地说,本公开的实施例涉及评估自主驾驶规划和控制(pnc)的方法和系统。
背景技术:
1、以自主模式(例如,无人驾驶)操作的车辆可以减轻乘坐者,尤其是驾驶员的一些驾驶相关责任。当以自主模式操作时,车辆可以使用车载传感器导航到各种位置,从而允许车辆以最小的人机交互或者在没有任何乘客的一些情况下行驶。
2、运动规划与控制(pnc)是自主驾驶中的关键操作。然而,常规的运动规划操作主要从曲率和速度来估计完成给定路径的难度,而没有考虑不同类型的车辆的特征差异。对所有类型的车辆都采用相同的运动规划和控制,这在某些情况下可能不准确和流畅。
3、需要正确评估pnc计算的方法或标准。例如,在确定性输出的基础上,pnc计算可能需要被优化或改进以符合社会期望。
技术实现思路
1、第一方面,提供一种评估自主驾驶规划和控制的计算机实现的方法,包括:
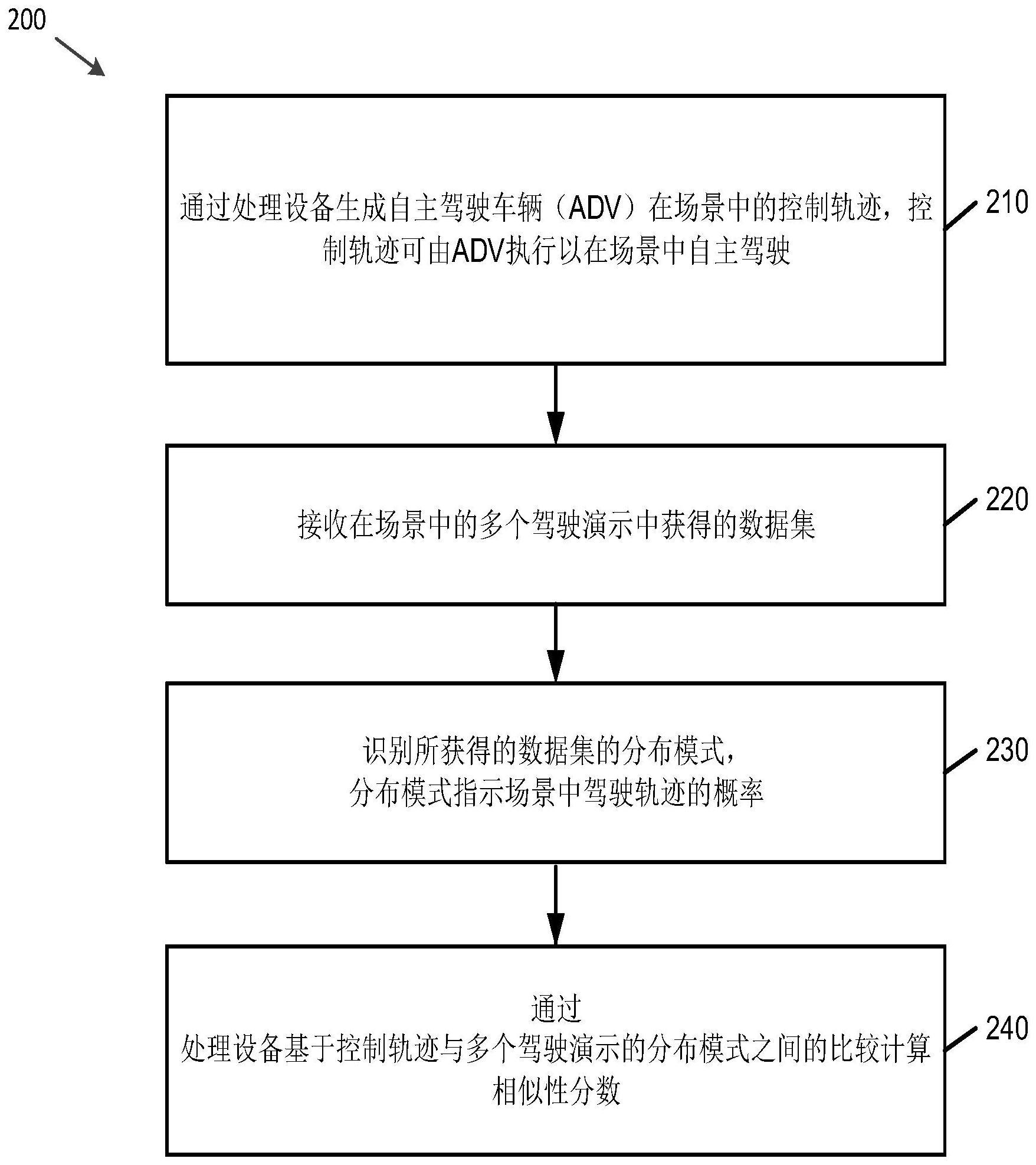
2、通过处理设备生成场景中的自主驾驶车辆(adv)的控制轨迹,所述控制轨迹由所述adv可执行以在所述场景中自主驾驶;
3、接收在所述场景中的多个驾驶演示中获得的数据集;
4、识别所获得的数据集的分布模式,所述分布模式指示所述场景中驾驶轨迹的概率;以及
5、通过所述处理设备基于所述控制轨迹与所述多个驾驶演示的分布模式之间的比较计算相似性分数。
6、第二方面,提供一种非暂时性机器可读介质,存储有指令,当由处理器执行指令时,使所述处理器执行如第一方面所述的方法的操作。
7、第三方面,提供一种处理设备,包括:
8、处理器;以及
9、与所述处理器耦合并存储指令的存储器,当所述指令由所述处理器执行时,使所述处理器执行如第一方面所述的方法的操作。
10、第四方面,提供一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时使得所述处理器执行如第一方面所述的方法的操作。
11、本公开提供了与专家演示的可靠和实用的比较,用于优化和微调基于学习的算法,从而改进自主驾驶规划和控制。
技术特征:
1.一种评估自主驾驶规划和控制的计算机实现的方法,包括:
2.如权利要求1中所述的计算机实现的方法,进一步包括:
3.如权利要求1中所述的计算机实现的方法,其中生成所述场景所述adv的控制轨迹包括:
4.如权利要求3中所述的计算机实现的方法,其中计算所述相似性分数包括以下中的至少一个:
5.如权利要求1中所述的计算机实现的方法,其中所述场景包括:
6.如权利要求5中所述的计算机实现的方法,其中所述场景包括以下中的至少一个:转向或顺序改变方向,超车,遵守交通标志,或其定时尝试。
7.如权利要求1中所述的计算机实现的方法,进一步包括:
8.如权利要求1中所述的计算机实现的方法,其中所述分布模式包括距离、速度或加速度的观察到的特征分布,或处理在所述多个驾驶演示中获得的数据集的深度学习层中的潜在空间特征的嵌入特征分布。
9.如权利要求1中所述的计算机实现的方法,其中所述多个驾驶演示包括在模拟环境中执行的演示。
10.一种非暂时性机器可读介质,存储有指令,当由处理器执行指令时,使所述处理器执行如权利要求1至9中任一项所述的方法的操作。
11.一种处理设备,包括:
12.一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时使得所述处理器执行如权利要求1至9中任一项所述的方法的操作。
技术总结
本公开提供了评估自主驾驶规划和控制(PNC)的方法和系统。方法包括:通过处理设备生成场景中的自主驾驶车辆(ADV)的控制轨迹,所述控制轨迹由所述ADV可执行以在所述场景中自主驾驶;接收在所述场景中的多个驾驶演示中获得的数据集;识别所获得的数据集的分布模式,所述分布模式指示所述场景中驾驶轨迹的概率;以及通过所述处理设备基于所述控制轨迹与所述多个驾驶演示的分布模式之间的比较计算相似性分数。
技术研发人员:吴思皓,姜舒,曹昱,林玮曼,李昂,胡江滔
受保护的技术使用者:百度(美国)有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!