一种降低二次扬尘的自动驾驶清扫车系统及控制方法与流程
本发明涉及清扫车,尤其是涉及一种降低二次扬尘的自动驾驶清扫车系统及控制方法。
背景技术:
1、目前清扫车所要面临的问题,现状一:吸尘车、干扫车的垃圾箱内增加过滤筒或过滤袋进行过滤除尘。过滤筒或袋的过滤基材为纸质、聚酯纤维或覆膜滤料等。优点是过滤效果好,缺点是遇水的工况下粘灰堵塞,滤筒或滤袋报废。
2、现状二:洗扫车、污染清除车的吸盘内增加高压水除尘,优点是晴雨天都能使用,缺点是灰尘量较大时抑尘效果不理想。
技术实现思路
1、鉴于以上现有技术的不足,本发明提供了一种降低二次扬尘的自动驾驶清扫车系统及控制方法,不仅提高了灰尘量较大时的抑尘效果,而且能够针对不同的灰尘含量进行自动调节,降低能量损耗。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
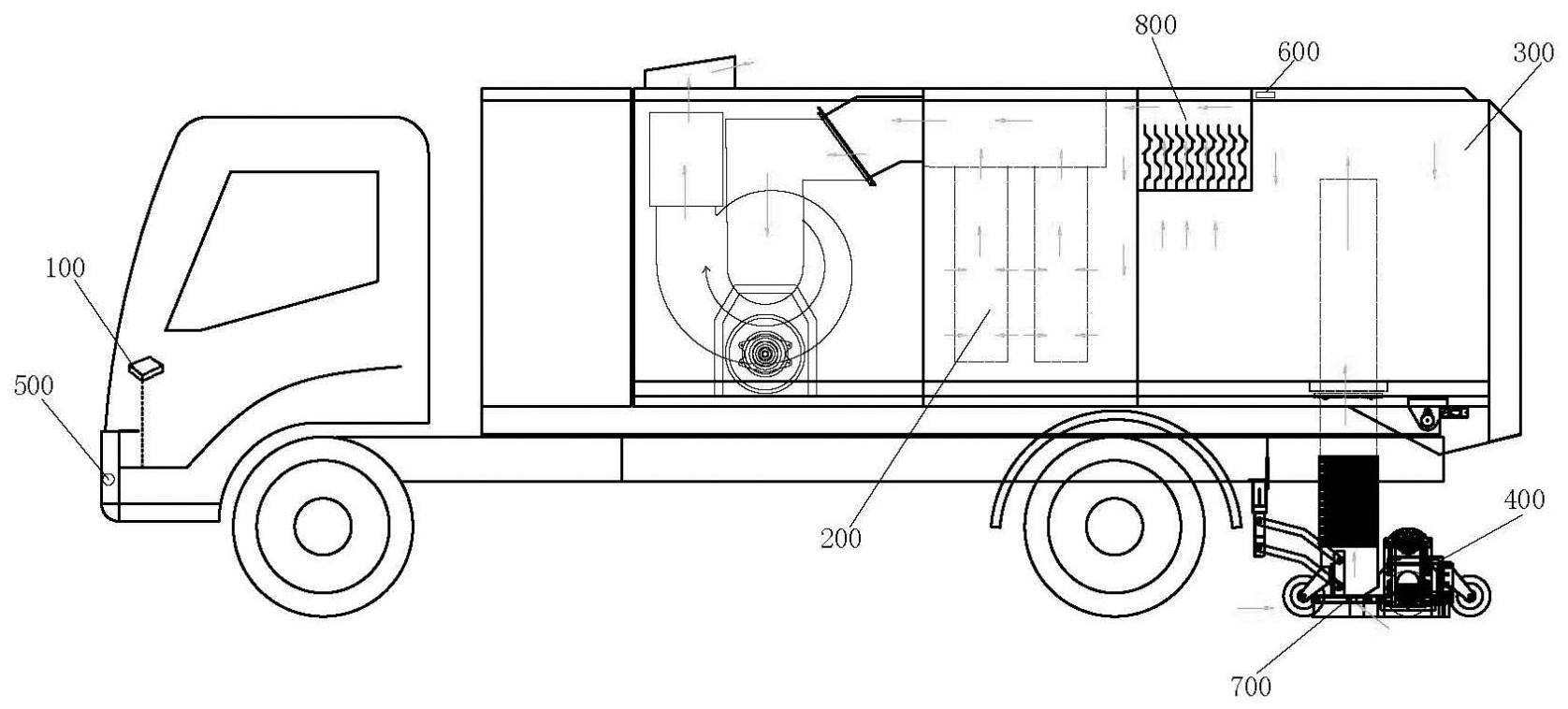
3、一种降低二次扬尘的自动驾驶清扫车系统,包括自动驾驶控制器、过滤机构、车载垃圾箱和吸尘机构,还包括:
4、车载灰尘传感器,用于实时获取清扫车所在位置的空气中灰尘含量数据信息;
5、车载摄像头,用于实时获取路面的图像数据信息;
6、折流板控制器,与所述灰尘传感器、所述车载摄像头连接,用于实时接收所述灰尘传感器传输的空气中灰尘含量数据,并进行存储和处理,且实时接收路面图像数据信息,提取路面灰尘图像特征并进行处理得到路面灰尘含量数据信息,结合路面灰尘含量数据信息和空气中灰尘含量数据信息,输出折流板控制数据信息;
7、折流板机构,包括第一区域折流板、第二区域折流板和第三区域折流板,与所述折流板控制器连接,接收折流板控制数据信息,对第一区域折流板、第二区域折流板和第三区域折流板进行控制。
8、进一步的,所述折流板控制器包括存储模块、计算模块和输出模块,所述计算模块的计算流程如下:
9、u1.将所述路面灰尘含量数据信息和所述空气中灰尘含量数据信息传输至bp神经网络进行训练和学习,得到路面灰尘含量的权重和空气灰尘含量的权重;
10、u2.基于所述路面灰尘含量的权重和所述空气灰尘含量的权重,采用灰狼优化算法进行优化,得到优化后的路面灰尘含量的权重和空气灰尘含量的权重;
11、u3.基于所述优化后的路面灰尘含量权重和空气灰尘含量权重,建立折流板控制参数函数f,
12、f=k1x+k2y,其中k1为优化后的路面灰尘含量权重,k2为优化后的空气灰尘含量权重,x为路面灰尘含量,y为空气灰尘含量,输出折流板的控制参数。
13、进一步的,所述存储模块与所述计算模块连接,所述计算模块与所述输出模块连接。
14、进一步的,所述折流板机构与所述吸尘机构连接,所述吸尘机构的出尘口设有所述第二区域折流板,所述第二区域折流板的两侧设有第一区域折流板,所述第二区域折流板的上方设有第三区域折流板。
15、进一步的,所述折流板控制器设于所述车载垃圾箱上,所述车载垃圾箱内部设有折流板机构,所述折流板机构的出气口连接有所述过滤机构,所述自动驾驶控制器设于清扫车车体内。
16、为了实现上述目的及其他相关目的,本发明还提供了一种降低二次扬尘的自动驾驶清扫车的控制方法,所述方法包括:
17、q1.基于车载摄像头实时获取路面的图像数据信息,基于车载灰尘传感器实时获取空气中灰尘含量数据信息;
18、q2.基于所述路面的图像数据信息进行图像特征提取和语义分割,得到路面灰尘含量的数据信息,并耦合所述空气中灰尘含量数据信息,采用bp神经网络进行训练和学习,输出路面灰尘含量的权重和空气灰尘含量的权重;
19、q3.根据所述路面灰尘含量的权重和空气灰尘含量的权重,采用灰狼优化算法,得到优化后的路面灰尘含量的权重和空气灰尘含量的权重,并建立折流板控制参数函数,输出折流板控制参数,根据所述折流板控制参数,对折流板机构进行控制。
20、进一步的,在步骤q3,所述对折流板机构进行控制包括:
21、q31.设置第一预设阈值和第二预设阈值,第二预设阈值大于第一预设阈值,若所述折流板控制参数小于第一预设阈值,则第二区域折流板开启,第一区域折流板和第二区域折流板关闭;
22、q32.若所述折流板控制参数大于第一预设阈值且小于第二预设阈值,则第二区域折流板和第三区域折流板开启,第三区域折流板关闭;
23、q33.若所述折流板控制参数大于所述第二预设阈值,则第一区域折流板、第二区域折流板和第二区域折流板都开启,进行灰尘过滤。
24、进一步的,在步骤q2中,所述得到路面灰尘含量数据信息包括:
25、q21.基于所述路面图像数据信息,采用lbp特征提取算法,输出路面图像的每个像素lbp值;
26、q22.基于所述路面图像的每个像素lbp值,设置第一预设像素阈值和第二像素预设阈值,第一像素预设阈值小于第二像素预设阈值,若像素lbp值小于第二像素预设阈值且大于第一像素阈值,则识别为灰尘,并对灰尘像素进行统计,输出路面灰尘含量数据信息。
27、进一步的,所述并对灰尘像素进行统计为采用采样均值统计算法,将采样的所述灰尘相对含量数据信息进行均值运算,得到路面灰尘含量数据信息。
28、进一步的,所述像素lbp值小于第一像素预设阈值或所述像素lbp值大于第二像素预设阈值,则不为灰尘像素。
29、本发明具有以下积极效果:
30、1.本发明通过折流板控制器对空气灰尘数据信息和路面灰尘数据信息进行统计,来对折流板机构进行控制,不仅能够对灰尘的含量进行精确的估计,而且调节折流板机构的三个不同的区域来降低灰尘,解决了二次扬尘的问题。
31、2.本发明通过结合bp神经网络和灰狼优化算法,对空气灰尘含量和折流板控制参数进行优化处理,并设置阈值,根据不同的折流板控制参数对折流板机构进行调节,可以有效降低日常清理灰尘的能量消耗。
技术特征:
1.一种降低二次扬尘的自动驾驶清扫车系统,包括自动驾驶控制器、过滤机构、车载垃圾箱和吸尘机构,其特征在于,还包括:
2.根据权利要求1所述的降低二次扬尘的自动驾驶清扫车系统,其特征在于,所述折流板控制器包括存储模块、计算模块和输出模块,所述计算模块的计算流程如下:
3.根据权利要求2所述的降低二次扬尘的自动驾驶清扫车系统,其特征在于:所述存储模块与所述计算模块连接,所述计算模块与所述输出模块连接。
4.根据权利要求1所述的降低二次扬尘的自动驾驶清扫车系统,其特征在于:所述折流板机构与所述吸尘机构连接,所述吸尘机构的出尘口设有所述第二区域折流板,所述第二区域折流板的两侧设有第一区域折流板,所述第二区域折流板的上方设有第三区域折流板。
5.根据权利要求1所述的降低二次扬尘的自动驾驶清扫车系统,其特征在于:所述折流板控制器设于所述车载垃圾箱上,所述车载垃圾箱内部设有折流板机构,所述折流板机构的出气口连接有所述过滤机构,所述自动驾驶控制器设于清扫车车体内。
6.一种降低二次扬尘的自动驾驶清扫车的控制方法,其特征在于,所述方法包括:
7.根据权利要求6所述的降低二次扬尘的自动驾驶清扫车的控制方法,其特征在于,在步骤q3,所述对折流板机构进行控制包括:
8.根据权利要求6所述的降低二次扬尘的自动驾驶清扫车的控制方法,其特征在于,在步骤q2中,所述得到路面灰尘含量数据信息包括:
9.根据权利要求8所述的降低二次扬尘的自动驾驶清扫车的控制方法,其特征在于:所述并对灰尘像素进行统计为采用采样均值统计算法,将采样的所述灰尘相对含量数据信息进行均值运算,得到路面灰尘含量数据信息。
10.根据权利要求8所述的降低二次扬尘的自动驾驶清扫车的控制方法,其特征在于:所述像素lbp值小于第一像素预设阈值或所述像素lbp值大于第二像素预设阈值,则不为灰尘像素。
技术总结
本发明涉及一种降低二次扬尘的自动驾驶清扫车系统及控制方法,包括自动驾驶控制器、过滤机构、车载垃圾箱和吸尘机构,还包括:车载灰尘传感器,用于实时获取清扫车所在位置的空气中灰尘含量数据信息;车载摄像头,用于实时获取路面的图像数据信息;折流板控制器,与所述灰尘传感器、所述车载摄像头连接,用于实时接收所述灰尘传感器传输的空气中灰尘含量数据,并进行存储和处理,且实时接收路面图像数据信息,提取路面灰尘图像特征并进行处理得到路面灰尘含量数据信息,结合路面灰尘含量数据信息和空气中灰尘含量数据信息。本发明不仅提高了灰尘量较大时的抑尘效果,而且能够针对不同的灰尘含量进行自动调节,降低能量损耗。
技术研发人员:周海儒,程阿罗,孙文兵,黄松师,程力威
受保护的技术使用者:程力专用汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!