一种基于多传感器融合的绳驱机器人力柔顺控制方法与系统,计算机存储介质
本发明涉及机器人控制领域,尤其是一种基于多传感器融合的绳驱机器人力柔顺控制方法与系统,计算机存储介质,以适用于绳驱机器人力柔顺控制的需求。
背景技术:
1、多传感器融合在机器人领域的应用越来越广泛,是机器人应用过程中不可缺少的技术。对传感器获取的数据进行有效的处理可以较好的提高机器人在复杂环境执行任务的能力。单一传感器通常获取的信息是局部、有限的,不能很好的描述所需环境。传感器还可能自身存在质量差、性能不佳等因素,不能收集到所需的完整信息,给机器人控制带来不确定性,影响机器人作业。多传感器融合是指综合不同位置、不同工作状态的多个传感器的局部信息,消除传感器冗余的信息并将得到的有效信息互补,以产生更可靠、更精确的信息,提高传感器的可靠性。从而提高机器人的决策能力,在降低其决策风险的同时,使机器人具有更加准确和快速的反应能力。
2、多传感器融合技术在机械臂末端定位上有良好的表现。hashimoto通过整合机械手关节传感器信息以实现稳健的机器人控制。利用传感器系统精确的估计关节状态,实现对机器人精确的鲁棒控制。alpek利用传感器系统对末端执行器和夹具进行监测,有助于消除机械臂压力传感器和扭矩传感器受到的外界干扰,提高机器人的可靠性。
3、多传感器融合技术在医疗机器人领域中有越来越多的应用。zhang设计了基于多传感器融合的胶囊内窥镜,基于多传感器数据融合解决了霍尔传感器、imu对腔内环境信息获取不完整的问题。为了实现机器人安全作业,避免机械臂对人体造成物理伤害,传感器的集成和融合是必不可少的。hu为提高显微手术机器人实施手术的效果,在机器人末端集成微小型传感器。通过微型力传感器和微型位移传感器来测量手术中的钻切力和深度信息,确保手术的安全。李佳辰提出了一种力—肌电信号融合的方法,在数据融合层面将人体表面的肌电信号和肘腕的力信号经卡尔曼滤波融合,将融合肌力信号输入到康复机器人控制其运动。
4、综上所述,在以往的研究中,多传感器融合技术已有了较为完善的成果。然而,该技术在绳驱机械臂力柔顺控制问题上的应用还有所欠缺。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的是提供一种基于多传感器融合的绳驱机器人力柔顺控制方法与系统,计算机存储介质,用于实现绳驱机器人力柔顺控制技术。
2、本发明所采用的一种技术方案是:一种基于多传感器融合的绳驱机器人力柔顺控制方法,包括以下步骤:
3、步骤一,设计绳驱机器人用于测量绳索的预紧力和绳索拉力变化的拉力传感器和用于测量绳驱机器人工作时末端受力的薄膜压力传感器;
4、步骤二,获取并记录拉力传感器和薄膜压力传感器上的力信号;
5、步骤三,将采集到的力信号进行融合处理并发送给绳驱机器人控制器对机器人进行控制;
6、步骤四,控制器根据多传感器融合后的决策力信号及时调整绳驱机器人的末端力,实现力柔顺控制。
7、进一步地,对于力信号的采集,薄膜压力传感器通过分压电路将压力大小变化对应的传感器输出电阻变化转为电压信号变化,再通过单片机实现a/d转换,获得末端力;
8、拉力传感器的拉力信号通过数字变送器实现拉力信号的a/d转换,再应用绳索拉力与末端压力的关系获得等效的末端力。
9、进一步地,运用卡尔曼滤波对薄膜压力传感器直接测得的末端力与绳索拉力等效的末端力进行实时融合,实现多传感器数据融合对实际末端力的估计。
10、进一步地,应用基于位置的阻抗控制来实现力柔顺控制;
11、基于位置的阻抗控制系统由位置控制内环和阻抗控制外环构成,对于绳驱机器人的平移运动和绳索的收放控制,阻抗控制外环是将直接测得的末端压力和绳索拉力等效的末端力融合后的力转换为位置/绳长的修正量,将此修正量加入到位置控制内环中,继而控制末端接触力。
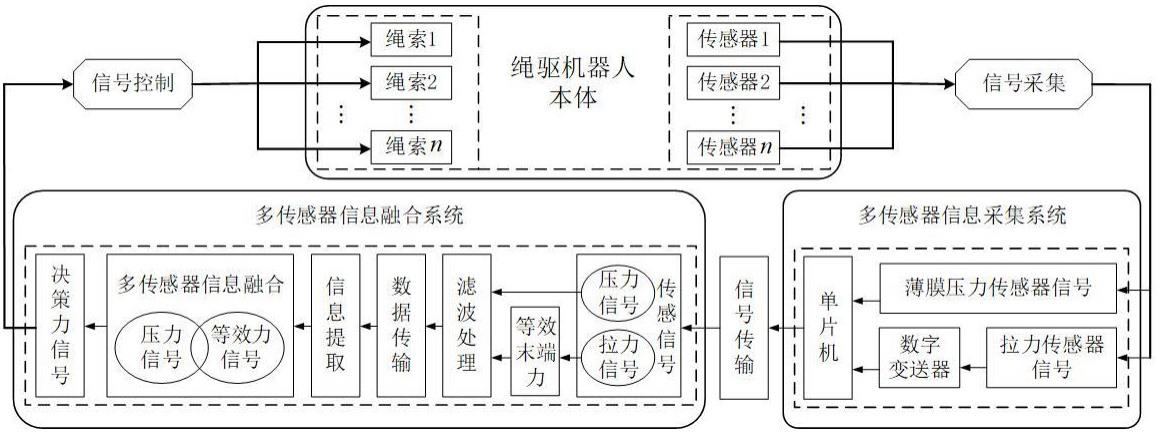
12、本发明所采用的另一技术方案是:一种基于多传感器融合的绳驱机器人力柔顺控制系统,包括:
13、多传感器信息采集单元:用于获取绳索拉力与末端压力;
14、信号处理单元:用于处理拉力传感器获取的拉力信号,根据绳索拉力与末端压力的关系获得等效的末端力;
15、多传感器融合单元:运用卡尔曼滤波对薄膜压力传感器直接测得的末端力与绳索拉力等效的末端力进行实时融合,实现多传感器数据融合对实际末端力的估计;
16、数据传输单元:用于将融合后的力信号传输给控制器单元;
17、控制器单元:内含基于位置的阻抗控制系统,用于控制绳索长度调整末端力,实现力柔顺控制。
18、本发明所采用的另一技术方案是:一种计算机存储介质,其上存储有计算机程序,所述程序被处理器执行时实现以下步骤:
19、步骤一,设计绳驱机器人用于测量绳索的预紧力和绳索拉力变化的拉力传感器和用于测量绳驱机器人工作时末端受力的薄膜压力传感器;
20、步骤二,获取并记录拉力传感器和薄膜压力传感器上的力信号;
21、步骤三,将采集到的力信号进行融合处理并发送给绳驱机器人控制器对机器人进行控制;
22、步骤四,控制器根据多传感器融合后的决策力信号及时调整绳驱机器人的末端力,实现力柔顺控制。
23、本发明的有益效果是:
24、开展了绳驱机器人基于多传感器融合的力柔顺控制研究,解决了绳驱机器人在作业时末端力度控制难的问题。本发明以机器人作业的安全性及工作质量为指标,建立了多传感器融合控制系统。将薄膜压力传感器的压力信号和绳索拉力等效的末端力信号通过卡尔曼滤波方法进行数据融合,为绳驱机器人的控制提供决策。通过主动调节绳索拉力减小了融合后的决策力与期望力的误差。最后通过位置阻抗控制系统来实现力柔顺控制。
技术特征:
1.一种基于多传感器融合的绳驱机器人力柔顺控制方法,包括以下步骤:
2.根据权利要求1所述的基于多传感器融合的绳驱机器人力柔顺控制方法,其特征在于:
3.根据权利要求1至2任一项所述的基于多传感器融合的绳驱机器人力柔顺控制方法,其特征在于:
4.根据权利要求1至3所述的基于多传感器融合的绳驱机器人力柔顺控制方法,其特征在于:
5.一种基于多传感器融合的绳驱机器人力柔顺控制系统,其特征在于,包括:
6.一种计算机存储介质,其特征在于,其上存储有计算机程序,所述程序被处理器执行时实现以下步骤:
技术总结
本发明公开了一种基于多传感器融合的绳驱机器人力柔顺控制方法与系统,计算机存储介质。本发明以绳驱机器人工作安全性和有效性为指标设计多传感器融合控制系统,其中方法如下:采集绳驱机器人工作时的薄膜压力传感器的压力信号和绳索拉力等效的末端力信号;运用卡尔曼滤波进行两组力信号的融合;根据融合后的决策力信号通过阻抗控制实现绳驱机器人力柔顺控制。本发明公开的基于多传感器融合的绳驱机器人力柔顺控制方法实现了绳驱机器人在狭窄环境的力感知及力控制,为力柔顺控制方法提供了一种安全高效的解决途径。
技术研发人员:牟宗高,高玉明,张辉,唐阳璞,李璐帆,邱俊烨,贾利慧,高名旺
受保护的技术使用者:山东理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!