一种用于温室大棚的精准植保多旋翼无人机系统和控制方法
本发明涉及无人机,尤其是涉及一种用于温室大棚的精准植保多旋翼无人机系统和控制方法。
背景技术:
1、国外现代化设施农业的发展较早、发展速度较快。我国自1980年代开始建立以大棚为中心,配合风障、温室、薄膜埋土覆盖等生产技术的初步合理的设施蔬菜生产体系。之后,设施农业稳步发展,到2002年我国已成为世界第一大设施农业大国。相较于传统农业生产模式,设施农业更高效,具有更多工业化特征。具体来说,设施农业不受时间和空间的限制,使用工程技术手段为植物生产提供适宜的生长环境,获得更高的产量、品质和经济效益。
2、目前都在积极推进无人机在设施外开放生产环境(大田)里的农业应用,如中国专利cn108313296a公开了一种用于农业播种的采用无线遥控技术的新型无人机,通过设有的储物装置能够增加无人机存放种子的数量,可以使得无人机在播种时大面积的播种,防止无人机需要来回的填充种子,提高了设备农业播种的效率和节约了无人机的电流排放量。
3、但是都还未针对设施类的农业场景设计可自主飞行的精准植保无人机。目前尚没有用于温室大棚的可自主飞行的精准植保无人机。温室大棚内现有的植保技术主要人工喷药,遥控喷药车喷药,喷药对植株穿透力度有限,农药使用率不高,在作物上会有较多的农药残留。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在通过人工进行喷药时,会对工作人员的人体造成伤害,而通过遥控喷药车进行喷药时,对植株的穿透力度有限,农药的使用率不高且喷洒不均匀,导致在做作物上会有较多的农药残留的缺陷而提供一种用于温室大棚的精准植保多旋翼无人机系统和控制方法。
2、本发明的目的可以通过以下技术方案来实现:
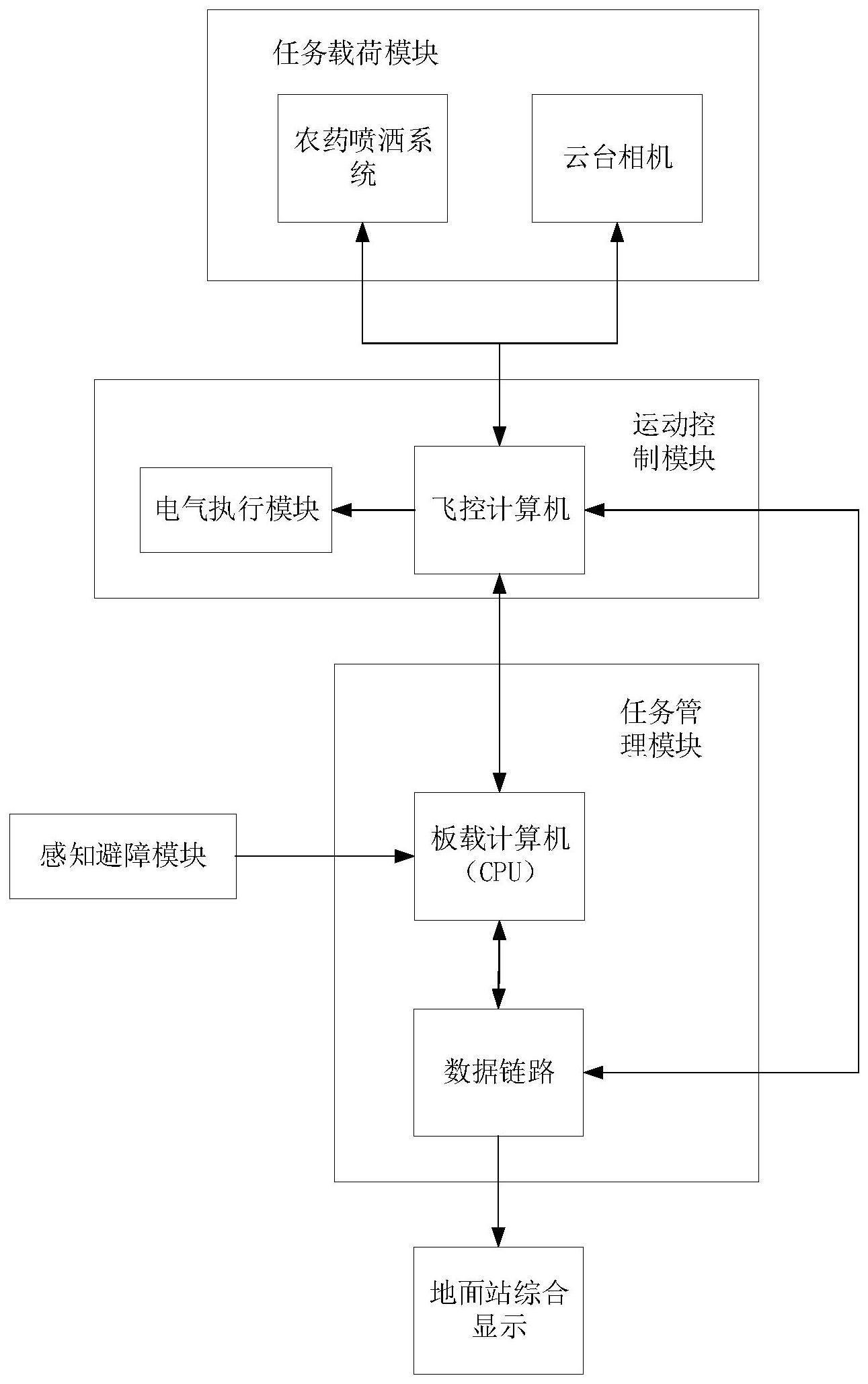
3、一种用于温室大棚的精准植保多旋翼无人机系统,包括任务载荷模块、运动控制模块、感知避障模块和任务管理模块,所述任务载荷模块包括药物喷洒部件和视觉巡检部件,所述视觉巡检部件用于获取外界图像信息,所述感知避障模块用于获取无人机航行路径上的障碍物信息,所述任务管理模块根据外界图像信息、障碍物信息以及药物喷洒部件的情况进行无人机航行路径的规划和控制,所述运动控制模块用于控制驱动无人机的飞行以及药物喷洒部件的喷洒动作。
4、进一步地,所述运动控制模块包括飞控计算机以及与飞控计算机相连接的陀螺仪、加速度计、磁力计和气压计,用于控制无人机动力系统和任务载荷系统的运行。
5、本方案还提供一种用于温室大棚的精准植保多旋翼无人机系统的控制方法,包括以下步骤:
6、获取待巡检区域,无人机移动至待巡检区域,获取无人机的飞行高度和图像采集的水平宽度,规划无人机的巡检航线,无人机根据规划的巡检航线自主飞行,获取待巡检区域的图像;
7、根据获取的待巡检区域的图像,判断是否需要进行植保作业,需要植保时,确定待植保区域;
8、获取待植保区域和无人机单位面积的喷洒量,根据喷嘴的分布特性规划无人机的植保航线,无人机根据规划的植保航线自主飞行进行植保作业。
9、进一步地,巡检航线规划过程中,基于视觉巡检部件获取图像在水平方向上的覆盖宽度确定巡检航线间隔,且巡检航线间隔小于图像水平方向的覆盖宽度,以此巡检航线间隔基于牛耕往复法得到规划巡检航线。
10、进一步地,无人机植保航线规划的具体步骤为:
11、获取待植保区域以及农药喷洒部件在无人机对应飞行高度下的雾滴分布特性,根据待植保区域和农药喷洒部件的雾滴分布特性确定无人机的植保航线间隔;所述植保航线间隔是无人机相邻两条航线之间的水平距离;在待植保区域根据植保航行间隔基于牛耕往复法得到规划植保航线。
12、进一步地,所述植保航线间隔直接影响雾滴重合度,所述雾滴重合度定义为两条航线上的雾滴在地面上的重叠面积与单条航线上的雾滴在地面上的面积之比;通过获取地面上每个点的雾滴沉淀量的方差,在约束范围内,以方差的最小值为目标,确定最佳的植保航线间隔。
13、进一步地,地面上雾滴沉淀量的方差公式表达为:
14、
15、式中,var_d表示地面上雾滴沉积量的方差,wmax是喷嘴喷幅的上限,d(x,l)是喷雾带上一点的雾滴沉积量,是地面条带上雾滴沉积均值,l表示植保航线间隔。
16、进一步地,通过网格离散化算法确定方差最小情况下的最优植保航线间隔,具体步骤包括:
17、将地面上的区域划分成多个小矩形,每个小矩形的面积为δs,每个小矩形的中心点的横坐标为xi;
18、将每个小矩形上的雾滴沉积量近似为其中心点的雾滴沉积量,即d(xi,l);
19、将地面上所有小矩形上的雾滴沉积量之和近似为地面上所有点的雾滴沉积量之和,即
20、将地面上所有小矩形的面积之和近似为地面上所有点的数目,即
21、对应的确定处理后的地面上雾滴沉淀量的方差公式表达为:
22、
23、式中,确定药物喷洒部件喷嘴的分布后,得到不同植保航线间隔下的均匀度,进而确定地面雾滴分布最均匀的植保航线间隔。
24、进一步地,所述无人机自主飞行的过程包括:
25、任务管理模块通过运动控制模块获取无人机自身的运动状态,并通过感知避障模块获取周围的环境信息;
26、根据无人机自身的运动状态和周围的环境信息,进行路径规划,得到安全的航行路线;
27、通过运动控制模块驱动无人机按照安全的航行路线航行。
28、进一步地,所述运动控制模块包括加速度计、陀螺仪、磁力计、气压计和gnss,所述获取的运动状态包括无人机的姿态、速度和位置。
29、与现有技术相比,本发明具有以下优点:
30、(1)本方案中无人机通过获取待植保区域和农药喷洒部件的雾滴分布特性,构建关于植保航线间隔的地面雾滴沉淀量的方差,并以地面雾滴沉淀量的方差最小为目标函数,得到能够使雾滴最均匀的植保航线间隔,从而使无人机植保作业时,植株上喷洒的农药分布更均匀,提高了农药的使用率,避免了农药的浪费,以及农药残留过多对植株产生的危害,使得植保作业更精准。
31、(2)本方案中无人机根据自身状态以及所获取的周围环境信息,进行自主飞行的安全路径规划,保证了航行安全性的同时,避免了通过人工遥控装置进行巡检以及植保的过程,提高了巡检和植保的准确性和安全性。
32、(3)本方案中通过无人机进行植保工作,避免了工作人员与农药喷洒过程的近距离参与,免于农药暴露的危险,有利于工作人员的安全健康。
技术特征:
1.一种用于温室大棚的精准植保多旋翼无人机系统,其特征在于,包括任务载荷模块、运动控制模块、感知避障模块和任务管理模块,所述任务载荷模块包括药物喷洒部件和视觉巡检部件,所述视觉巡检部件用于获取外界图像信息,所述感知避障模块用于获取无人机航行路径上的障碍物信息,所述任务管理模块根据外界图像信息、障碍物信息以及药物喷洒部件的情况进行无人机航行路径的规划和控制,所述运动控制模块用于控制驱动无人机的飞行以及药物喷洒部件的喷洒动作。
2.根据权利要求1所述的一种用于温室大棚的精准植保多旋翼无人机系统,其特征在于,所述运动控制模块包括飞控计算机以及与飞控计算机相连接的陀螺仪、加速度计、磁力计和气压计,用于控制无人机动力系统和任务载荷系统的运行。
3.一种基于权利要求1-2任一所述的一种用于温室大棚的精准植保多旋翼无人机系统的控制方法,其特征在于,包括以下步骤:
4.根据权利要求3所述的一种用于温室大棚的精准植保多旋翼无人机系统控制方法,其特征在于,巡检航线规划过程中,基于视觉巡检部件获取图像在水平方向上的覆盖宽度确定巡检航线间隔,且巡检航线间隔小于图像水平方向的覆盖宽度,以此巡检航线间隔基于牛耕往复法得到规划巡检航线。
5.根据权利要求3所述的一种用于温室大棚的精准植保多旋翼无人机系统控制方法,其特征在于,无人机植保航线规划的具体步骤为:
6.根据权利要求5所述的一种用于温室大棚的精准植保多旋翼无人机系统控制方法,其特征在于,所述植保航线间隔直接影响雾滴重合度,所述雾滴重合度定义为两条航线上的雾滴在地面上的重叠面积与单条航线上的雾滴在地面上的面积之比;通过获取地面上每个点的雾滴沉淀量的方差,在约束范围内,以方差的最小值为目标,确定最佳的植保航线间隔。
7.根据权利要求6所述的一种用于温室大棚的精准植保多旋翼无人机系统控制方法,其特征在于,地面上雾滴沉淀量的方差公式表达为:
8.根据权利要求7所述的一种用于温室大棚的精准植保多旋翼无人机系统控制方法,其特征在于,通过网格离散化算法确定方差最小情况下的最优植保航线间隔,具体步骤包括:
9.根据权利要求3所述的一种用于温室大棚的精准植保多旋翼无人机系统控制方法,其特征在于,所述无人机自主飞行的过程包括:
10.根据权利要求9所述的一种用于温室大棚的精准植保多旋翼无人机系统控制方法,其特征在于,所述运动控制模块包括加速度计、陀螺仪、磁力计、气压计和gnss,所述获取的运动状态包括无人机的姿态、速度和位置。
技术总结
本发明涉及一种用于温室大棚的精准植保多旋翼无人机系统和控制方法,该系统包括任务载荷模块、运动控制模块、感知避障模块和任务管理模块,所述任务载荷模块包括药物喷洒部件和视觉巡检部件,所述视觉巡检部件用于获取外界图像信息,所述感知避障模块用于获取无人机航行路径上的障碍物信息,所述任务管理模块根据外界图像信息、障碍物信息以及药物喷洒部件的情况进行无人机航行路径的规划和控制,所述运动控制模块用于控制驱动无人机的飞行以及药物喷洒部件的喷洒动作。与现有技术相比,本发明具有农药喷洒均匀、利用率高等优点。
技术研发人员:岑峰,戴兴平,杨兴杰,吕壹凡
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!