一种多轴实时运动控制系统的制作方法
本发明属于运动控制,特别是涉及一种多轴实时运动控制系统。
背景技术:
1、随着现代科技的进步和工业的发展,半导体前道/后道检测设备、多轴多测量维度设备、多自由度高精密运动设备等对运动控制系统的要求也越来越高。运动控制系统需要满足高可靠、高实时、高带宽、低延迟、低抖动、高同步和高速高精度等特性。
2、目前,市场上商用的运动控制系统主要面对的是通用或专用领域,在运动控制系统硬件、控制算法和数据通讯性能上已经愈来愈无法满足高端场合的使用需求。市面上商用的运动控制系统在硬件系统上分为以下三大类:
3、以单片机或者mcu为控制核心的运动控制系统;
4、以专用控制芯片asic为控制核心的运动控制系统;
5、基于pc架构的运动控制系统。
6、以单片机或者mcu为控制核心的运动控制系统,受mcu的计算性能影响,只能适用于简单控制系统,控制精度低,处理速度慢。以专用控制芯片asic为控制核心的运动控制系统,则多轴协作能力差,且依赖于专用运动控制ic,灵活性差。基于pc架构的运动控制系统,受限于操作系统,其实时性无法做到最优化。且商用的运动控制系统功能较集中,没有根据实时性的等级进行控制系统单元模块的明确划分,导致控制架构不够灵活。
7、同时,商用的运动控制系统多采用网络化总线通讯,实现了一网到底的设备互联,但通讯带宽仍较低,比如常用的ethercat总线、can总线、profinet总线等,无法满足大数据的实时传输。且一个系统只有一种现场总线,高速和低速设备混在在一起,无法同时兼顾,且现场总线模块无法做到距离现场设备最优的区域布置,尤其是现场设备输出模拟信号,对信号采集质量有很大影响。
技术实现思路
1、基于此,本发明提供了一种多轴实时运动控制系统,该系统可简化布线,缩短传输延迟,提高控制带宽及稳定性,且控制架构灵活,扩展性强。
2、为解决上述技术问题,实现上述技术效果,本发明通过以下技术方案实:
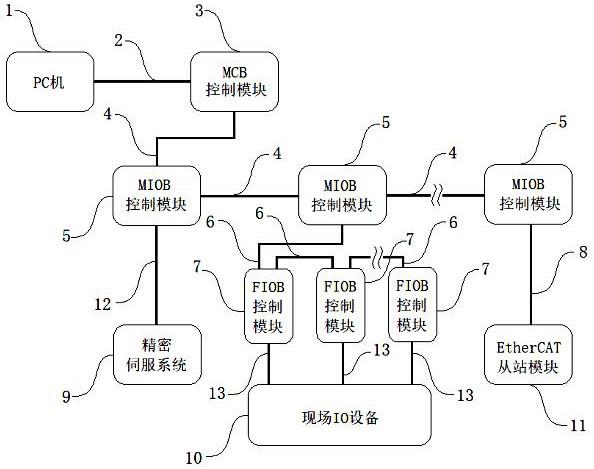
3、一种多轴实时运动控制系统,采用mcb+miob+fiob的硬件拓扑结构,包括mcb控制模块、miob控制模块和fiob控制模块,以及高速光纤环网总线和高速串行现场总线;其中,
4、所述mcb控制模块为主控制单元,通过所述高速光纤环网总线与所述miob控制模块通讯;
5、所述miob控制模块为高速数据采集单元,通过所述高速串行现场总线与所述fiob控制模块通讯;
6、所述fiob控制模块为现场设备数据采集模块。
7、进一步的,还包括pc机、精密多轴伺服系统、现场io设备和ethercat从站模块;
8、所述mcb控制模块的一端与pc机通讯连接,所述mcb控制模块的另一端通过所述高速光纤环网总线与多个所述miob控制模块通讯连接;
9、所述miob控制模块或与所述精密伺服系统通讯连接,或与所述ethercat从站模块通讯连接,或通过所述高速串行现场总线与多个所述fiob控制模块通讯连接;
10、所有所述fiob控制模块分别与各自对应的所述现场io设备通讯连接。
11、进一步的,所述mcb控制模块采用soc+fpga的硬件架构;所述mcb控制模块的内部包括soc芯片、第一fpga芯片、以太网通讯接口、第一存储单元、第一时钟管理单元、第一电源管理单元、第一复位电路、第一高速光纤通讯接口和串口通讯单元。
12、进一步的,所述miob控制模块采用xilinx高性能fpga,所述miob控制模块的内部包括第二fpga芯片、第二高速光纤通讯接口、第二存储单元、第二时钟管理单元、第二电源管理单元、第二复位电路、温度监测单元、dsp数据计算单元、ethercat主站模块、同步管理单元、高速encoder采集单元、驱动器控制命令接口和第二高速串行现场总线接口。
13、进一步的,所述fiob控制模块采用cpld作为主处理器,所述fiob控制模块内部包括cpld处理器、第三电源管理单元、第三时钟管理、第三高速串行现场总线接口、模数转换单元、数模转换单元、io处理单元和第三复位电路。
14、进一步的,所述高速光纤环网总线基于xilinx fpga的高速gtx接口,在aurora8b10b ip核的基础上制定光纤环网总线协议,以满足1个所述mcb控制模块和多个所述miob控制模块高速通讯的环形拓扑结构需求,实现了高速光纤一缆到底的互联。
15、进一步的,所述光纤环网总线协议包含了数据报头段、miob辨识标志段、数据段、校验段,确保了整个传输过程的稳定可靠。
16、进一步的,所述高速光纤环网总线采用10gb的光纤收发器和多模光纤,通讯距离最大300m。
17、进一步的,所述mcb控制模块通过所述高速光纤环网总线与多个所述miob控制模块进行数据交互,采用串行通讯方式,所述mcb控制模块发出的数据从第一个所述miob控制模块依次传输至最后一个所述miob控制模块,再由最后一个所述miob控制模块将所述mcb控制模块待读取数据依次传至第一个所述miob控制模块,最后传输至所述mcb控制模块。
18、进一步的,所述高速串行现场总线为高速多节点主从结构的rs485总线。
19、本发明采用了mcb+miob+fiob的硬件架构,运动控制系统的功能区分更明确,设备间的互联关系更简单,极大的简化了系统的布线。
20、本发明对运动控制系统的强实时性模块和弱实时性模块进行了功能的划分,分别采用高带宽低抖动的光纤总线和现场设备总线,缩短了传输延迟提高了系统的控制带宽和稳定性。
21、本发明的高速光纤环网总线,实现了一主多从的控制拓扑,扩展性强,可根据系统复杂程度进行灵活的扩展,可以应用于半导体前道/后道检测设备、多轴多测量维度设备、多自由度高精密运动设备等,适用范围广。
22、上述说明仅是本发明技术方案的概述,为了能够更清楚了解发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
技术特征:
1.一种多轴实时运动控制系统,其特征在于:包括mcb控制模块(3)、miob控制模块(5)和fiob控制模块(7),以及高速光纤环网总线(4)和高速串行现场总线(6);其中,
2.根据权利要求1所述的多轴实时运动控制系统,其特征在于:还包括pc机(1)、精密多轴伺服系统(9)、现场io设备(10)和ethercat从站模块(11);
3.根据权利要求1所述的多轴实时运动控制系统,其特征在于:所述mcb控制模块(3)采用soc+fpga的硬件架构;所述mcb控制模块(3)的内部包括soc芯片、第一fpga芯片、以太网通讯接口、第一存储单元、第一时钟管理单元、第一电源管理单元、第一复位电路、第一高速光纤通讯接口和串口通讯单元。
4.根据权利要求1所述的多轴实时运动控制系统,其特征在于:所述miob控制模块(5)采用fpga,所述miob控制模块(5)的内部包括第二fpga芯片、第二高速光纤通讯接口、第二存储单元、第二时钟管理单元、第二电源管理单元、第二复位电路、温度监测单元、dsp数据计算单元、ethercat主站模块、同步管理单元、高速encoder采集单元、驱动器控制命令接口和第二高速串行现场总线接口。
5.根据权利要求1所述的多轴实时运动控制系统,其特征在于:所述fiob控制模块(7)采用cpld作为主处理器,所述fiob控制模块(7)内部包括cpld处理器、第三电源管理单元、第三时钟管理、第三高速串行现场总线接口、模数转换单元、数模转换单元、io处理单元和第三复位电路。
6.根据权利要求1所述的多轴实时运动控制系统,其特征在于:所述高速光纤环网总线(4)基于xilinx fpga的高速gtx接口,在aurora 8b10b ip核的基础上制定光纤环网总线协议。
7.根据权利要求7所述的多轴实时运动控制系统,其特征在于:所述光纤环网总线协议包含了数据报头段、miob辨识标志段、数据段、校验段。
8.根据权利要求6所述的多轴实时运动控制系统,其特征在于:所述高速光纤环网总线(4)采用10gb的光纤收发器和多模光纤,通讯距离最大300m。
9.根据权利要求6所述的多轴实时运动控制系统,其特征在于:所述mcb控制模块(3)通过所述高速光纤环网总线(4)与多个所述miob控制模块(5)进行数据交互,采用串行通讯方式,所述mcb控制模块(3)发出的数据从第一个所述miob控制模块(5)依次传输至最后一个所述miob控制模块(5),再由最后一个所述miob控制模块(5)将所述mcb控制模块(3)待读取数据依次传至第一个所述miob控制模块(5),最后传输至所述mcb控制模块(3)。
10.根据权利要求1所述的多轴实时运动控制系统,其特征在于:所述高速串行现场总线(6)为高速多节点主从结构的rs485总线。
技术总结
本发明公开了一种多轴实时运动控制系统,包括MCB控制模块、MIOB控制模块、FIOB控制模块、高速光纤环网总线和高速串行现场总线;所述MCB控制模块为主控制单元,通过所述高速光纤环网总线与所述MIOB控制模块通讯;所述MIOB控制模块为高速数据采集单元,通过所述高速串行现场总线与所述FIOB控制模块通讯;所述FIOB控制模块为现场设备数据采集模块。本发明简化了系统布线,缩短了传输延迟,提高了系统的控制带宽和稳定性,解决了传统的多轴控制系统实时性受限制、总线速度单一的缺点。
技术研发人员:李丰,陆海亮,杜俊岐,JJGM·汉斯·杜伊斯特,颜洪雷,周光骅
受保护的技术使用者:江苏集萃苏科思科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!