一种自动巡航设备的避障方法与流程
本发明涉及自动巡航设备,尤其是涉及一种自动巡航设备的避障方法。
背景技术:
1、当前,自动巡航设备在物联网的各个领域应用广泛,例如扫地机器人、自动巡航物流车等。然而,环境的复杂性和不确定性导致设备难以掌握自身与障碍物的相对位置,目前通常的解决方案是结合视觉传感技术、激光感应技术,作为巡航避障的主要手段,但是这些方案在执行效率、安全性等方面有着些许不足。
技术实现思路
1、本发明的目的在于提供一种自动巡航设备的避障方法,以解决现有技术中存在的避障手段执行效率、安全性存在不足的技术问题。
2、为实现上述目的,本发明提供了以下技术方案:
3、本发明提供的一种自动巡航设备的避障方法,基于有向距离场实现,包括如下步骤:
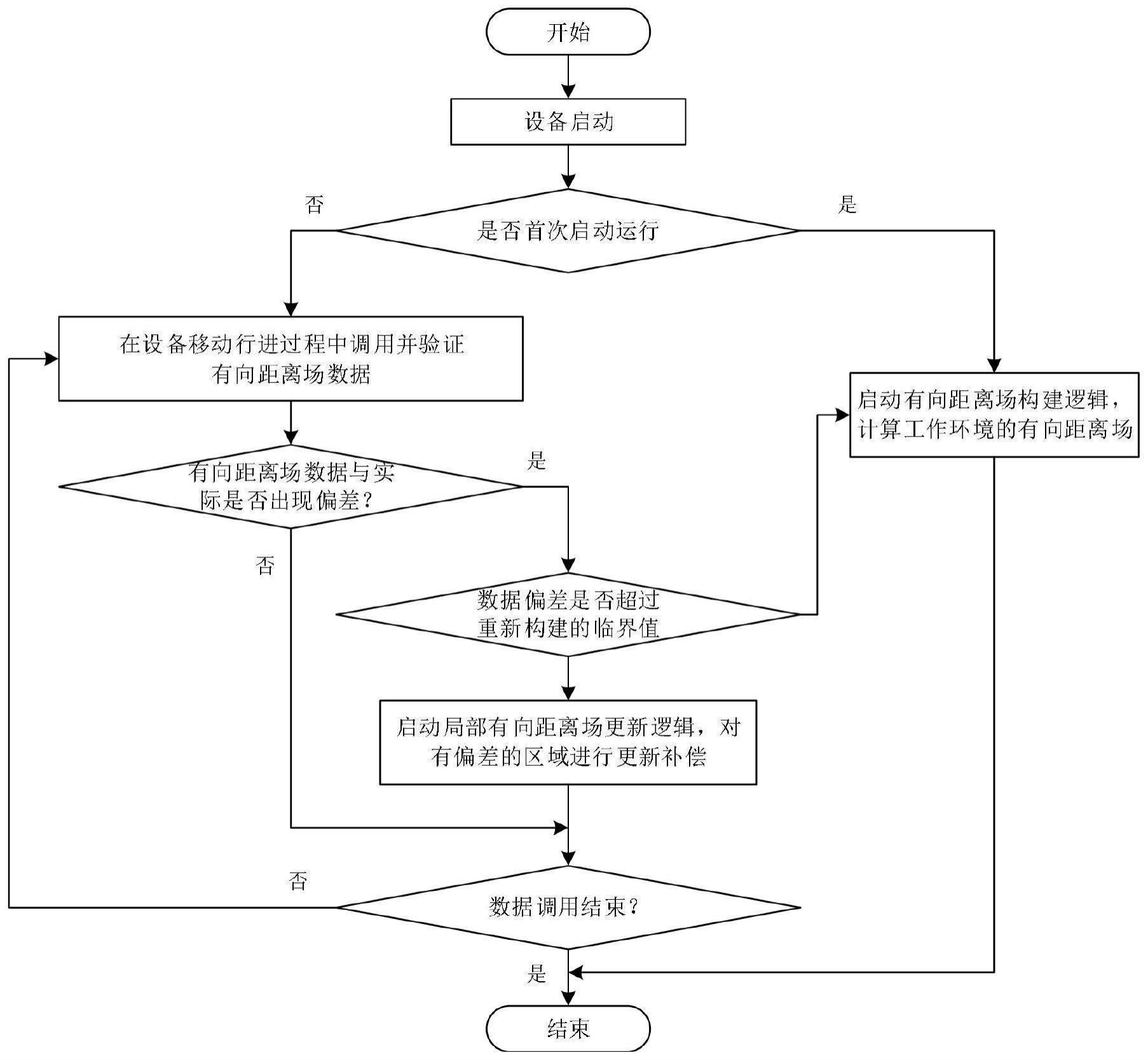
4、步骤s1、判断目标设备启动情况,根据判断结果执行步骤s2或s3;
5、步骤s2、当目标设备为首次启动时,完成有向距离场构建和设备嵌入,重复执行步骤s1;
6、步骤s3、当目标设备非首次启动时,调用嵌入的有向距离场,完成行走避障。
7、进一步的,有向距离场的构建,包括:
8、步骤s21、获取目标设备的工作环境信息;
9、步骤s22、将获取的工作环境信息进行处理,完成设备移动空间的有向距离场的构建。
10、进一步的,获取目标设备的工作环境信息采用目标设备自身的环境感知手段完成,或者是,依据于外部辅助设备完成。
11、进一步的,所述有向距离场中数据的组成包括:工作环境平面中每个坐标点到离其最近的物体边界的距离和方向。
12、进一步的,步骤s3中,调用嵌入的有向距离场,完成行走避障,包括:
13、步骤s31、当设备移动行进到任意位置时,调用有向距离场的数据;
14、步骤s32、根据调用的数据,得到设备距离最近的障碍物的距离场值;
15、步骤s33、将得到的距离场值与安全距离比较,根据比较结果执行初级动作。
16、进一步的,初级动作,包括:
17、当距离场值大于安全距离时,目标设备按照规划路线继续前进;
18、当距离场值小于安全距离时,执行次级动作。
19、进一步的,次级动作,包括:
20、目标设备的主控确认该点的有向距离场方向与目标设备的当前行进方向的偏差;
21、当偏差安全时,目标设备按照规划路线继续前进;
22、当偏差有风险时,根据偏差和距离场值通过目标设备的主控路线算法,计算下一步行进路线。
23、进一步的,在调用有向距离场数据时,还包括并列的验证步骤:
24、步骤s34、将调用的数据与实际相比,判断是否出现偏差;
25、步骤s35、根据偏差结果,进行有向距离场的数据更新。
26、进一步的,有向距离场的数据更新,包括:
27、步骤s36、局部数据更新,工作环境的物体位置变动范围小于临界值时;
28、步骤s37、全量数据更新,工作环境的物体位置变动范围大于临界值时。
29、进一步的,局部数据更新,包括如下步骤:
30、步骤s361、获取当前位置小范围内的环境信息,完成有向数据场的有偏差区域的局部数据更新。
31、进一步的,全量数据更新,包括如下步骤:
32、步骤s371、重复步骤s21和s22,完成新的环境的有向距离场的构建。
33、本发明提供的自动巡航设备的避障方法,通过获取设备工作环境的距离场数据,以扫地机器人为例,在其首次运行前,会有构建环境数据的过程,在此过程中同步的生成环境距离场数据;然后在后续设备运行过程中,只需要查询当前位置的距离场值即可,可有效简化设备在移动过程中障碍物的识别过程,在一定的特殊情况下,甚至可以取消摄像头或者激光雷达等装置,而完全采用本发明的避障方法,因此能够降低设备移动过程中的算法复杂度,并且还能减少额外的硬件支持,有效降低成本。
技术特征:
1.一种自动巡航设备的避障方法,其特征在于,基于有向距离场实现,包括如下步骤:
2.根据权利要求1所述的自动巡航设备的避障方法,其特征在于,有向距离场的构建,包括:
3.根据权利要求2所述的自动巡航设备的避障方法,其特征在于,获取目标设备的工作环境信息采用目标设备自身的环境感知手段完成,或者是,依据于外部辅助设备完成。
4.根据权利要求1所述的自动巡航设备的避障方法,其特征在于,所述有向距离场中数据的组成包括:工作环境平面中每个坐标点到离其最近的物体边界的距离和方向。
5.根据权利要求1所述的自动巡航设备的避障方法,其特征在于,步骤s3中,调用嵌入的有向距离场,完成行走避障,包括:
6.根据权利要求5所述的自动巡航设备的避障方法,其特征在于,初级动作,包括:
7.根据权利要求6所述的自动巡航设备的避障方法,其特征在于,次级动作,包括:
8.根据权利要求5所述的自动巡航设备的避障方法,其特征在于,在调用有向距离场数据时,还包括并列的验证步骤:
9.根据权利要求8所述的自动巡航设备的避障方法,其特征在于,有向距离场的数据更新,包括:
10.根据权利要求9所述的自动巡航设备的避障方法,其特征在于,局部数据更新,包括如下步骤:
11.根据权利要求9所述的自动巡航设备的避障方法,其特征在于,全量数据更新,包括如下步骤:
技术总结
本发明提供了一种自动巡航设备的避障方法,涉及自动巡航设备技术领域,解决了避障手段执行效率、安全性存在不足的技术问题。该自动巡航设备的避障方法,基于有向距离场实现,包括如下步骤:步骤S1、判断目标设备启动情况,根据判断结果执行步骤S2或S3;步骤S2、当目标设备为首次启动时,完成有向距离场构建和设备嵌入,重复执行步骤S1;步骤S3、当目标设备非首次启动时,调用嵌入的有向距离场,完成行走避障。本发明通过获取设备工作环境的距离场数据,生成环境有向距离场;然后在后续设备运行过程中,只需要查询当前位置的距离场值即可,可有效简化设备在移动过程中障碍物的识别过程,效率高、安全性高。
技术研发人员:张冠宇
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!