实时多线程控制的恐龙操作系统及方法
本发明涉及仿生机械控制领域,具体为实时多线程控制的恐龙操作系统及方法。
背景技术:
1、仿生恐龙,英文名simu1ation dinosaur,也叫机器(电、气动)恐龙。是指运用现代科技手段,并根据恐龙化石及其生态复原图制作出的形象逼真的恐龙个体。
2、制作出的仿生恐龙,在外观造型、肢体动作等方面都非常逼真,活灵活现,能直观、形象的让人们了解、认识早已作古的恐龙生命,还原其“迷失的世界”。此种能动会叫的“活体恐龙”制作,最早始于美国,后发展到日本。上世纪90年代初,日本的k0k0r0公司的机器恐龙产品开始进入中国的一些大城市巡展。代表品种有自贡仿生恐龙。仿生恐龙最早在上世纪八十年代中期出现在自贡灯会中。
3、仿生恐龙在旅游景观展览、科普教育、博物馆陈列等多方面具有广泛的用途,对于促进恐龙的了解与教育具有非常大的意义。但是目前的恐龙控制器或控制系统(终端)存在着设计规范不足、技术创新点不够、可操作性能差、无法实时移动终端操作、控制器传统单一等问题。
技术实现思路
1、为解决上述问题,本发明提供一种实时多线程控制的恐龙操作系统,包括恐龙控制器、恐龙控制系统;所述恐龙控制系统包括指令发送模块、指令输入模块、指令解析模块、指令反馈及信息收集模块。
2、进一步地,所述恐龙控制器包括:控制器核心部件、控制器控制部件和外壳;所述控制器核心部件为核心控制板,控制器控制部件包括六关节控制接口、电源接口、电路保险丝、光耦合隔离保护接口、核心控制板接入接口;所述控制器控制部件置于外壳内部,所述六关节控制接口、电源接口、电路保险丝及光耦合隔离保护接口围绕核心控制板接入接口呈半包围排布,六关节控制接口位于核心控制板接入接口上方,核心控制板接入接口的右方由上至下为电路保险丝及电源接口,核心控制板接入接口的左侧为光耦合隔离保护接口;所述核心控制板通过核心控制板接入接口与控制器控制部件相连接。
3、进一步地,所述核心控制板包括:蓝牙控制模块、复位按键、程序下载接口、主控核心芯片、usb外接接口及多个固定核心面板;所述主控核心芯片位于核心控制板的正中央,蓝牙控制模块为独立模块位于核心控制板上方,usb外接接口位于主控核心芯片的左侧,复位按键位于主控核心芯片的左下方,所述程序下载接口位于主控核心芯片的右侧;所述固定核心面板均匀分布与核心控制板的四角。
4、进一步地,所述指令发送模块用于发送指令信息至恐龙控制器中;所述指令输入模块用于输入指令控制信息;所述指令解析模块用于解析输入的指令信息,并传输至指令发送模块;所述指令反馈及信息收集模块用于接收指令实际运作时的运作状态,并获取运作时所产生的相关参数信息。
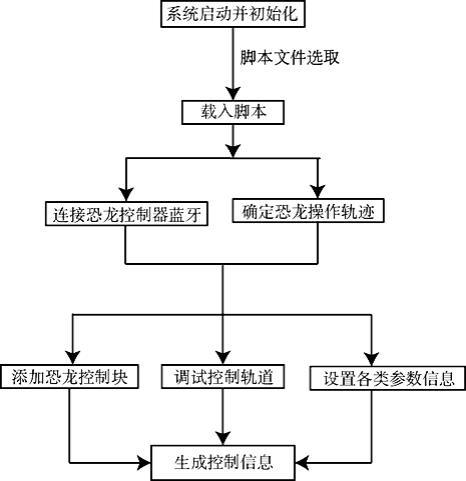
5、一种实时多线程控制的恐龙操作方法,包括以下步骤:s1.系统启动并初始化控制系统;s2.选取脚本文件,并将选取好的脚本文件载入系统中;s3.连接恐龙控制器蓝牙,并确定恐龙操作轨迹;s4.添加恐龙控制模块,对恐龙操作轨迹进行调试并设置各项参数信息;s5.生成控制信息后传入恐龙控制器中对恐龙进行控制。
6、进一步地,所述s4步骤中对恐龙操作轨迹进行调试包括以下子步骤:s41.控制器核心部件接收控制信息,并将接收到的控制信息传至控制器控制部件中;s42.控制器控制部件根据协议分别将信息传递至恐龙各个关节的控制通道中;s43.由控制器核心部件中的信息收集终端收集控制信息,再传至指令反馈及信息收集模块依据返回信息对恐龙操作轨迹进行校正调试。
7、进一步地,s4步骤中所述参数信息包括:开始时间、持续时间、结束时间、开始和结束值、颜色、高低电平。
8、本发明提供实时多线程控制的恐龙操作系统及方法,具有以下有益效果:
9、(1)解决了现有技术中的一些恐龙机器人控制系统存在控制精度不高、运动稳定性差等问题。本发明通过提供丰富的控制算法和数据采集方式,可以实现精确的运动控制和环境感知,提高恐龙机器人的运动性能和稳定性,并提高控制精度和响应速度。
10、(2)解决了现有技术中的一些恐龙机器人控制系统存在控制操作复杂、用户界面不友好等问题。本发明提供了直观简洁的用户界面,可以减少用户学习成本,提高用户的使用体验。
11、(3)解决了现有技术中的一些恐龙机器人控制系统存在远程控制和故障检测不方便等问题。本发明支持远程控制和监控,可以实现更加便捷和灵活的控制和管理。同时,本发明采用了多种故障检测和容错机制,可以快速识别和处理故障,提高系统的稳定性和可靠性。
技术特征:
1.一种实时多线程控制的恐龙操作系统,其特征在于,包括恐龙控制器、恐龙控制系统;所述恐龙控制系统包括指令发送模块、指令输入模块、指令解析模块、指令反馈及信息收集模块。
2.根据权利要求1所述的实时多线程控制的恐龙操作系统,其特征在于,所述恐龙控制器包括:控制器核心部件、控制器控制部件和外壳(11);所述控制器核心部件为核心控制板,控制器控制部件包括六关节控制接口(7)、电源接口(9)、电路保险丝(8)、光耦合隔离保护接口(12)、核心控制板接入接口(10);所述控制器控制部件置于外壳(11)内部,所述六关节控制接口(7)、电源接口(9)、电路保险丝(8)及光耦合隔离保护接口(11)围绕核心控制板接入接口(10)呈半包围排布,六关节控制接口(7)位于核心控制板接入接口上方,核心控制板接入接口(10)的右方由上至下为电路保险丝(8)及电源接口(9),核心控制板接入接口(10)的左侧为光耦合隔离保护接口(12);所述核心控制板通过核心控制板接入接口(10)与控制器控制部件相连接。
3.根据权利要求2所述的实时多线程控制的恐龙操作系统,其特征在于,所述核心控制板包括:蓝牙控制模块(4)、复位按键(6)、程序下载接口(3)、主控核心芯片(1)、usb外接接口(5)及多个固定核心面板(2);所述主控核心芯片(1)位于核心控制板的正中央,蓝牙控制模块(4)为独立模块位于核心控制板上方,usb外接接口(5)位于主控核心芯片(1)的左侧,复位按键(6)位于主控核心芯片(1)的左下方,所述程序下载接口(3)位于主控核心芯片(1)的右侧;所述固定核心面板(2)均匀分布于核心控制板的四角。
4.根据权利要求1所述的实时多线程控制的恐龙操作系统,其特征在于,所述指令发送模块用于发送指令信息至恐龙控制器中;所述指令输入模块用于输入指令控制信息;所述指令解析模块用于解析输入的指令信息,并传输至指令发送模块;所述指令反馈及信息收集模块用于接收指令实际运作时的运作状态,并获取运作时所产生的相关参数信息。
5.一种实时多线程控制的恐龙操作方法,基于权利要求1-4任一项所述的实时多线程控制的恐龙操作系统,其特征在于,包括以下步骤:
6.根据权利要求5所述的实时多线程控制的恐龙操作方法,其特征在于,所述s4步骤中对恐龙操作轨迹进行调试包括以下子步骤:
7.根据权利要求5所述的实时多线程控制的恐龙操作方法,其特征在于,s4步骤中所述参数信息包括:开始时间、持续时间、结束时间、开始和结束值、颜色、高低电平。
技术总结
本发明公开了实时多线程控制的恐龙操作系统及方法。方法包括以下步骤:S1.系统启动并初始化控制系统;S2.选取脚本文件,并将选取好的脚本文件载入系统中;S3.连接恐龙控制器蓝牙,并确定恐龙操作轨迹;S4.添加恐龙控制模块,对恐龙操作轨迹进行调试并设置各项参数信息;S5.生成控制信息后传入恐龙控制器中对恐龙进行控制。系统包括恐龙控制器、恐龙控制系统;所述恐龙控制系统包括指令发送模块、指令输入模块、指令解析模块、指令反馈及信息收集模块。本发明提供了丰富的控制算法和数据采集方式,可以实现精确的运动控制和环境感知,提高恐龙机器人的运动性能和稳定性,并提高控制精度和响应速度。
技术研发人员:赵俊,王浩然,杨韩,周秀丽
受保护的技术使用者:四川轻化工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!