一种基于模糊自抗扰控制的船舶动力定位系统及方法与流程
本发明涉及智能船舶领域,尤其涉及一种基于模糊自抗扰控制的船舶动力定位系统及方法。
背景技术:
1、船舶在海上航行过程中,受环境影响大,风、浪、流的变化都会使其偏离原有位置,为了使船舶在受到外界干扰时,仍能保持在原有航线上运动,目前常用的方法是使用pid(proportional、integral、differential)控制系统对船舶进行控制,pid控制系统中的负反馈调节能够对船舶位置进行不断的调整,最终使其恢复到原有位置。但由于船舶航行中具有非线性和时变不确定性,致使pid参数整定不良,很难建立精确的数学模型,导致pid控制实际工况的适应能力较差。同时船舶受到一阶海浪的高频扰动致使滤波器引入误差信号,导致相位滞后,船舶偏离原有航线。此外pid控制还存在带宽限制以及定位精度不高的局限性。
技术实现思路
1、建立的模糊自抗扰控制系统不依赖于精确的数学模型,将不确定的干扰因素归结为位置扰动并通过反馈调节进行补偿,提高抗干扰性和适应性,以获得更高的精度。
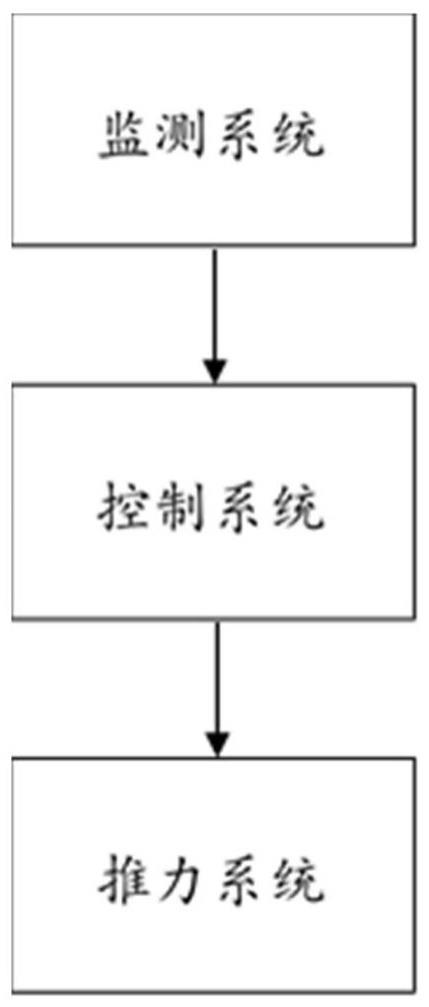
2、本发明提供了一种基于模糊自抗扰控制的船舶动力定位系统,包括:
3、监测系统,用于获知船舶所处的位置、船舶的艏向并且采集外界海况消息;
4、控制系统,包括模糊自抗扰控制器,用于将接收到的监测系统输入的信号进行模糊自抗扰处理,输入为将船舶维持在期望位置所需的控制量;
5、和推力系统,用于为船舶动力定位系统提供抗扰所需要的力和力矩。
6、进一步地,所述自抗扰控制器包括:
7、跟踪微分器(td),接收监测系统给定的带有测量噪声的船舶位置和艏向信号,通过最速控制综合函数得到跟踪信号v1和微分信号v2;
8、扩张状态观测器(eso),其将非线性误差反馈的输出作为信息来源,得到船舶位置的估计值z1、船速的估计值z2以及船舶受到的总干扰估计量z3,其中总干扰估计量z3补偿到控制器中,用反馈补偿的方式抑制扰动,实现抗干扰的效果;
9、模糊控制器,用于整定非线性状态反馈控制率的调节参数k1、k2,通过对跟踪微分器的跟踪信号v1和扩张状态观测器的第一输出z1作差得到的误差e1和跟踪微分器的微分信号v2和扩张状态观测器的第二输出z2作差得到的误差e2进行处理,得出非线性状态反馈控制率的调节参数k1和k2。
10、非线性状态误差反馈(nlsef),将误差e1和e2结合非线性状态反馈控制率的调节参数k1和k2作为输入,进行非线性处理,得到最初的控制信号量u0;
11、和扰动估计补偿,将最初的控制信号量u0和所处环境中所需的控制信号量z3/b0作差,得到系统为保持在期望位置还需的控制量u。
12、进一步地,所述对e1和e2进行处理包括:对e1和e2的模糊化处理,建立模糊规则表,再对其进行清晰化处理。
13、进一步地,所述监测系统包括位置参考系统和传感器系统。
14、进一步地,所述推力系统包括执行机构、发电设备、输电设备、动力机械及其他辅助设备。
15、进一步地,控制系统将监测系统传输的不确定的干扰因素归结为位置扰动的误差信号,并通过反馈调节进行补偿。
16、进一步地,对于会对船舶位置造成影响的环境要素风、浪、流进行前馈控制。
17、进一步地,监测系统、控制系统和推力系统共同作用以实现船舶动力定位系统对船舶位置的实时控制。监测系统获取船舶周围环境以及所处位置的相关参数,由控制系统进行读取,再对读取的数值进行处理,得到与期望位置的误差,对误差进行补偿控制,并计算出补偿控制所需的力和力矩;推力系统得到控制信号后,向其包括的各个机构和设备发出指令,通过所述机构和设备调节船舶的位置,同时监测系统实时获取船舶的位置信息,再次将信息传递给控制器,以此循环,实现对船舶位置的实时控制。
18、还提供一种基于模糊自抗扰控制的船舶动力定位方法,包括:
19、步骤100,获取位置信息和艏向信息;
20、步骤200,通过模糊自抗扰控制方法对获取到的数据进行处理,最终得到使船舶保持在期望位置时所需的控制量;
21、步骤300,将输入的控制量进行推力分配,控制船舶运动,将船舶稳定在期望位置上。
22、进一步地,所述步骤200包括:
23、步骤201,由数据检测器对从位置参考系统和传感器系统中读取的实时船舶信息进行监测,若出现数据信息异常或船舶定位异常的情况,需更换备用传感器。
24、步骤202,对输入的带有测量噪声的船舶位置和艏向信息进行跟踪微分处理,跟踪输入信号,得到跟踪信号v1和微分信号v2。
25、步骤203,将非线性误差反馈输出的信息作为输入,对船舶的位置、速度以及所受到的总干扰量进行估计,得到的z1、z2和z3分别代表船舶位置的估计值、船速的估计值以及所受总干扰量的估计值,并将总干扰量z3补偿到控制器中,用反馈补偿的方式抑制扰动。
26、步骤204,通过对跟踪信号v1和第一输出z1作差得到误差e1;同样的,对微分信号v2和第二输出z2作差得到误差e2。对e1和e2进行模糊化处理,建立模糊规则表,并进行清晰化处理,确定非线性状态反馈控制率的调节参数k1和k2。
27、步骤205,对误差e1和e2结合非线性状态反馈控制率的调节参数k1和k2作为输入,对其进行非线性处理,能够得到最初的控制信号量u0。
28、步骤206,将最初的控制信号量u0和所处环境中所需的控制信号量z3/b0作差,得到系统为保持在期望位置还需的控制量u,将u补偿到控制器中。
29、与现有技术相比,本发明至少可实现如下有益效果之一:
30、a)本发明提供的基于模糊自抗扰控制的船舶动力定位系统,将监测系统传输的不确定的干扰因素归结为位置扰动引起的误差信号,进行反馈调节,能够提高系统的抗干扰性和适应性,并且获得更高的精度。
31、b)本发明提供的基于模糊自抗扰控制的船舶动力定位系统,通过模糊自抗扰控制方法计算误差,能够降低不确定性干扰对船舶的影响和船舶动力定位系统的误差,提高了船舶的稳定性。
32、c)本发明提供的基于模糊自抗扰控制的船舶动力定位方法,使用了模糊自抗扰的控制方法,可以在不依赖于船舶精确的数学模型的情况下,达到理想的控制效果。
33、d)本发明提供的基于模糊自抗扰控制的船舶动力定位方法,通过对接收到的扰动误差信号加以补偿提高了系统的鲁棒性,降低了系统的超调量,达到了无静差的效果。
技术特征:
1.一种基于模糊自抗扰控制的船舶动力定位系统,其特征在于,包括:
2.根据权利要求1所述的基于模糊自抗扰控制的船舶动力定位系统,其特征在于,所述自抗扰控制器包括:
3.根据权利要求2所述的基于模糊自抗扰控制的船舶动力定位系统,其特征在于,对e1和e2进行处理包括:对e1和e2的模糊化处理,建立模糊规则表,再对其进行清晰化处理。
4.根据权利要求1所述的基于模糊自抗扰控制的船舶动力定位系统,其特征在于,所述监测系统包括位置参考系统和传感器系统。
5.根据权利要求1所述的基于模糊自抗扰控制的船舶动力定位系统,其特征在于,所述推力系统包括执行机构、发电设备、输电设备、动力机械及其他辅助设备。
6.根据权利要求1所述的基于模糊自抗扰控制的船舶动力定位系统,其特征在于,控制系统将监测系统传输的不确定的干扰因素归结为位置扰动的误差信号,并通过反馈调节进行补偿。
7.根据权利要求1所述的基于模糊自抗扰控制的船舶动力定位系统,其特征在于,对于会对船舶位置造成影响的环境要素风、浪、流进行前馈控制。
8.根据权利要求1所述的基于模糊自抗扰控制的船舶动力定位系统,其特征在于,监测系统、控制系统和推力系统共同作用以实现船舶动力定位系统对船舶位置的实时控制,监测系统获取船舶周围环境以及所处位置的相关参数,由控制系统进行读取,再对读取的数值进行处理,得到与期望位置的误差,对误差进行补偿控制,并计算出补偿控制所需的力和力矩;推力系统得到控制信号后,向其包括的各个机构和设备发出指令,通过所述机构和设备调节船舶的位置,同时监测系统实时获取船舶的位置信息,再次将信息传递给控制器,以此循环,实现对船舶位置的实时控制。
9.一种基于模糊自抗扰控制的船舶动力定位方法,其特征在于,包括:
10.根据权利要求9所述的基于模糊自抗扰控制的船舶动力定位方法,其特征在于,所述步骤200包括:
技术总结
本专利涉及一种基于模糊自抗扰控制的船舶动力定位系统及方法,所述系统包括:监测系统,用于获知船舶所处的位置、船舶的艏向并且采集外界海况消息;控制系统,包括模糊自抗扰控制器,用于将接收到的监测系统输入的信号进行模糊自抗扰处理,输入为将船舶维持在期望位置所需的控制量;和推力系统,用于为船舶动力定位系统提供抗扰所需要的力和力矩。所述方法包括:获取位置信息和艏向信息;通过模糊自抗扰控制方法对获取到的数据进行处理,最终得到使船舶保持在期望位置时所需的控制量;将输入的控制量进行推力分配,控制船舶运动,将船舶稳定在期望位置上。本发明不依赖于被控系统精确的数学模型,拥有良好的控制效果和抗干扰能力。
技术研发人员:张宝晨,姜雨函,朱慎超,张兰,曹志伟,董蓬莱
受保护的技术使用者:智慧航海(青岛)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!