高空幕墙清洗无人机的数据采集处理系统的制作方法
本发明涉及一种数据采集处理系统,特别涉及一种高空幕墙清洗无人机的数据采集处理系统,属于高空幕墙无人机清洗。
背景技术:
1、玻璃幕墙是指由体系可相对有一定位移能力、不分担主体结构所受作用的建筑外或。有单层和双层两种。玻璃幕墙是一种美观新颖的建筑墙体装饰方法,是时代的显著特征。
2、对于高层建筑而言,设置于高空的玻璃幕墙长期暴露在室外环境下,其表面容易积累灰尘和污垢,需要及时对幕墙进行清洗,才能保证幕墙的清洁度和清晰度,但传统的高空幕墙清洗大多为人工作业,需要工作人员在高空手动进行清洗,清洗效率较低,且存在作业风险,因此相比于传统模式,利用无人机进行清洗更加快捷和方便,但无人机高空清洗作业过程中,由于操作人员无法近距离观察无人机的工作状态,手动操作无人机完成幕墙清洗难度较大,因此需要提前采集高空幕墙以及各项环境数据,并提前制定清洗计划,才能保证无人机能够自动化完成清洗作业,为此,提出一种高空幕墙清洗无人机的数据采集处理系统。
技术实现思路
1、有鉴于此,本发明提供高空幕墙清洗无人机的数据采集处理系统,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
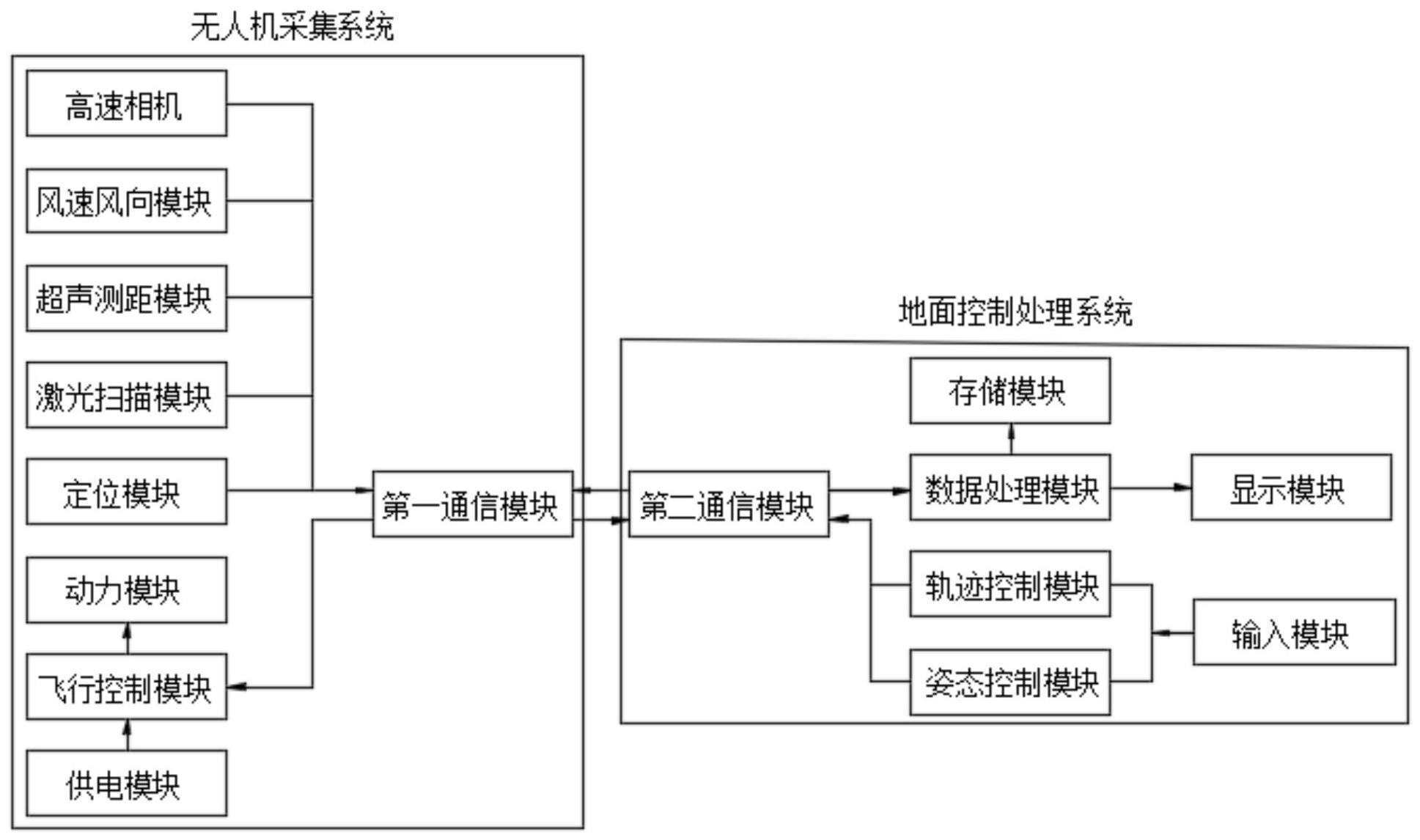
2、本发明实施例的技术方案是这样实现的:一种高空幕墙清洗无人机的数据采集处理系统,包括无人机采集系统和地面控制处理系统,所述无人机采集系统包括高速相机、风向风速模块、超声测距模块、激光扫描模块、定位模块和第一通信模块;
3、所述高速相机、风向风速模块、超声测距模块、激光扫描模块和定位模块的信号输出端与所述第一通信模块的信号输入端信号连接;
4、所述地面控制处理系统包括第二通信模块、数据处理模块、存储模块和显示模块;
5、所述第二通信模块的信号输出端与所述数据处理模块的信号输入端信号连接,所述数据处理模块的信号输出端与所述存储模块和显示模块的信号输入端信号连接,所述第一通信模块与所述第二通信模块信号连接,所述第一通信模块与所述第二通信模块用于信号连接无人机采集系统以及地面控制处理系统,数据处理模块用于接收和处理各项采集数据,并给出和执行清理方案。
6、进一步优选的:所述无人机采集系统还包括动力模块、飞行控制模块和供电模块;
7、所述供电模块的电性输出端与飞行控制模块的电性输入端电性连接,所述飞行控制模块的电性输出端与所述动力模块的电性输入端电性连接,所述第一通信模块的信号输出端与所述飞行控制模块的信号输入端信号连接。
8、进一步优选的:所述地面控制处理系统还包括轨迹控制模块、姿态控制模块和输入模块;
9、所述输入模块的信号输出端与所述轨迹控制模块和姿态控制模块的信号输入端信号连接,所述轨迹控制模块和姿态控制模块的信号输出端与所述第二通信模块的信号输入端信号连接。
10、进一步优选的:所述高速相机用于拍摄建筑平面图像,并将图像通过通信模块上传至数据处理模块,数据处理模块根据图像计算建筑幕墙高度、宽度和面积,并确认激光扫描范围。
11、进一步优选的:所述风向风速模块用于检测清洗工作区域的风速和风向,并将信号通过通信模块发送至数据处理模块,数据处理模块根据风向和风速数据判断现场环境是否符合清洗作业环境要求。
12、进一步优选的:所述超声测距模块用于测量无人机与地面和建筑幕墙之间的距离,从而得到清洗作业实际执行位置的坐标,并将坐标发送至数据处理模块,数据处理模块将实际坐标与预设坐标进行对比,分析执行位置是否存在偏差。
13、进一步优选的:所述激光扫描模块用于扫描幕墙骨架,接缝和玻璃面板三维信息特征,并将数据通过通信模块发送至数据处理模块,数据处理模块根据三维信息特征建立幕墙模型,并计算玻璃幕墙面板数量和单个面板面积,根据数量、面积以及清洗作业效率计算清洗所需时间。
14、进一步优选的:所述定位模块用于定位无人机位置,并将位置信息通过通信模块发送至数据处理模块,数据处理模块将信息储存于存储模块中,记录数据采集点的位置。
15、进一步优选的:所述供电模块用于为无人机动力系统进行供电,所述飞行控制模块用于控制无人机动力系统工作状态,所述动力模块用于为无人机飞行提供动力。
16、进一步优选的:所述输入模块用于人工操作数据采集处理系统,所述轨迹控制模块和姿态控制模块用于设定无人机的飞行姿态以及飞行轨迹。
17、本发明实施例由于采用以上技术方案,其具有以下优点:
18、一、本发明通过高速相机、风向风速模块、激光扫描模块和定位模块采集幕墙清洗所需的各项数据,并将数据汇总至数据处理模块,数据处理模块对信息进行处理,并给出清洗方案,保证无人机能够完成自动化清洗作业。
19、二、本发明通过超声测距模块检测无人机执行方案时的坐标数据,防止无人机执行作业位置出现偏差,提高无人机清洗作业的效果。
20、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本发明进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种高空幕墙清洗无人机的数据采集处理系统,包括无人机采集系统和地面控制处理系统,其特征在于:所述无人机采集系统包括高速相机、风向风速模块、超声测距模块、激光扫描模块、定位模块和第一通信模块;
2.根据权利要求1所述的高空幕墙清洗无人机的数据采集处理系统,其特征在于:所述无人机采集系统还包括动力模块、飞行控制模块和供电模块;
3.根据权利要求1所述的高空幕墙清洗无人机的数据采集处理系统,其特征在于:所述地面控制处理系统还包括轨迹控制模块、姿态控制模块和输入模块;
4.根据权利要求1所述的高空幕墙清洗无人机的数据采集处理系统,其特征在于:所述高速相机用于拍摄建筑平面图像,并将图像通过通信模块上传至数据处理模块,数据处理模块根据图像计算建筑幕墙高度、宽度和面积,并确认激光扫描范围。
5.根据权利要求1所述的高空幕墙清洗无人机的数据采集处理系统,其特征在于:所述风向风速模块用于检测清洗工作区域的风速和风向,并将信号通过通信模块发送至数据处理模块,数据处理模块根据风向和风速数据判断现场环境是否符合清洗作业环境要求。
6.根据权利要求1所述的高空幕墙清洗无人机的数据采集处理系统,其特征在于:所述超声测距模块用于测量无人机与地面和建筑幕墙之间的距离,从而得到清洗作业实际执行位置的坐标,并将坐标发送至数据处理模块,数据处理模块将实际坐标与预设坐标进行对比,分析执行位置是否存在偏差。
7.根据权利要求1所述的高空幕墙清洗无人机的数据采集处理系统,其特征在于:所述激光扫描模块用于扫描幕墙骨架,接缝和玻璃面板三维信息特征,并将数据通过通信模块发送至数据处理模块,数据处理模块根据三维信息特征建立幕墙模型,并计算玻璃幕墙面板数量和单个面板面积,根据数量、面积以及清洗作业效率计算清洗所需时间。
8.根据权利要求1所述的高空幕墙清洗无人机的数据采集处理系统,其特征在于:所述定位模块用于定位无人机位置,并将位置信息通过通信模块发送至数据处理模块,数据处理模块将信息储存于存储模块中,记录数据采集点的位置。
9.根据权利要求2所述的高空幕墙清洗无人机的数据采集处理系统,其特征在于:所述供电模块用于为无人机动力系统进行供电,所述飞行控制模块用于控制无人机动力系统工作状态,所述动力模块用于为无人机飞行提供动力。
10.根据权利要求3所述的高空幕墙清洗无人机的数据采集处理系统,其特征在于:所述输入模块用于人工操作数据采集处理系统,所述轨迹控制模块和姿态控制模块用于设定无人机的飞行姿态以及飞行轨迹。
技术总结
本发明提供了一种高空幕墙清洗无人机的数据采集处理系统,包括无人机采集系统和地面控制处理系统,所述无人机采集系统包括高速相机、风向风速模块、超声测距模块、激光扫描模块、定位模块和第一通信模块;所述地面控制处理系统包括第二通信模块、数据处理模块、存储模块和显示模块。本发明通过高速相机、风向风速模块、激光扫描模块和定位模块采集幕墙清洗所需的各项数据,并将数据汇总至数据处理模块,数据处理模块对信息进行处理,并给出清洗方案,保证无人机能够完成自动化清洗作业。通过超声测距模块检测无人机执行方案时的坐标数据,防止无人机执行作业位置出现偏差,提高无人机清洗作业的效果。
技术研发人员:潘億玲,周晓悦,赵保军,王跃征
受保护的技术使用者:深圳市三合智义科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!