一种基于孪生模型的智能多模型预测控制方法及系统与流程
本发明属于工业过程控制,具体地说是一种基于孪生模型的智能多模型预测控制方法及系统。
背景技术:
1、在工业过程控制系统中,预测控制系统可以很好地解决过程控制系统的优化问题,但是对模型的要求较高,当系统有多个工况时,模型的变化对控制性能有较大的影响,需要一种适应全工况的智能多模型预测控制方法及系统。
2、现有模型的预测控制对模型要求较高,当工况发生变化时,被控对象特性会发生较大变化,此时模型的预测控制性能下降较大。
技术实现思路
1、本发明所要解决的技术问题是克服上述现有技术存在的缺陷,提供一种基于孪生模型的智能多模型预测控制方法及系统,其可在每个工况下进行精准控制,最终实现全工况优化控制,从而在线完成被控系统的诊断和优化。
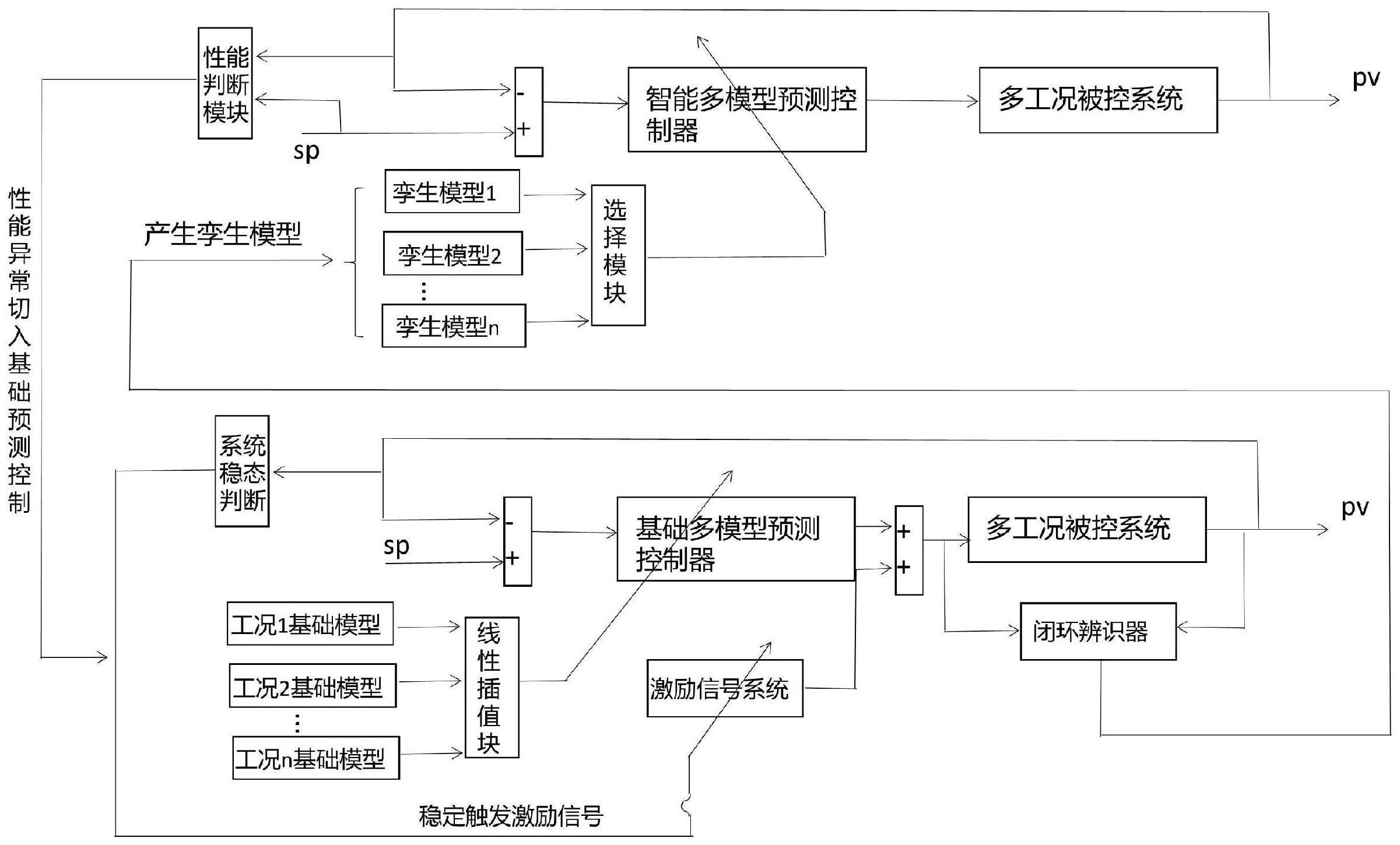
2、为此,本发明采用如下的技术方案:一种基于孪生模型的智能多模型预测控制方法,其包括:
3、以多个工况基础模型和线性插值块构造基础多模型预测控制器,在所述的基础多模型预测控制器中实现稳定控制并生成孪生模型;
4、以多个孪生模型和选择模块构造智能多模型预测控制器;
5、在智能多模型预测控制器中逐次进行多工况孪生模型匹配,最终实现全工况优化控制。
6、进一步地,针对一个多工况被控系统,所述的智能多模型预测控制器最初只含有一个工况下的精确模型,进行优化控制。
7、更进一步地,当智能多模型预测控制器检测到控制性能变差后,切换至基础预测控制,待多工况被控系统稳定,在控制指令处加入激励信号,在线记录闭环响应数据,辨识器的参数范围设置为基础多模型预测控制器中相邻各个模型的参数后进行在线闭环模型辨识;辨识完成后进行模型阶跃扰动仿真实验,完成后再进行针对实际对象的阶跃扰动试验。
8、更进一步地,根据设定值和误差幅值进行系统稳态判断,若设定值未变且误差幅值在一定区间,则认为达到稳定状态。
9、更进一步地,闭环辨识器可进行多个不同工况的基础模型辨识,记住每次的辨识参数,根据当前工况与各次辨识工况中最接近原则,切换至最新工况基础模型,其为在相应工况在线闭环辨识出的基础模型;基础预测控制切至智能预测控制进行优化控制,如果工况再次变化,控制性能再次变差,重复前述的激励和建模过程,生成对应工况的孪生模型;根据工况复杂情况,设立相应次数的孪生模型辨识、仿真与控制,当超过规定次数生成孪生模型后,则认为完成了全工况的建模。
10、更进一步地,性能判断模块根据误差的多个幅值阈值和延迟时间,判断控制性能是否合适。
11、更进一步地,在多次生成孪生模型后,在每个工况下进行精准控制,实现全工况优化控制。
12、本发明还提供一种基于孪生模型的智能多模型预测控制系统,其包括:
13、基础多模型预测控制器:以多个工况基础模型和线性插值块构造基础多模型预测控制器;
14、孪生模型:在所述的基础多模型预测控制器中实现稳定控制并生成孪生模型;
15、智能多模型预测控制器:以多个孪生模型和选择模块构造智能多模型预测控制器;
16、全工况优化控制单元:在智能多模型预测控制器中逐次进行多工况孪生模型匹配,最终实现全工况优化控制。
17、本发明具有以下有益效果:本发明以多个工况基础模型和线性插值块构造基础多模型预测控制器,在基础多模型预测控制器中实现稳定控制并生成孪生模型,以孪生模型构造智能多模型预测控制器,可在每个工况下进行精准控制,在智能多模型预测控制器中逐次进行多工况孪生模型匹配,最终实现全工况的优化控制,从而在线完成被控系统的诊断和优化。
18、下面结合说明书附图和具体实施方式对本发明作进一步说明。
技术特征:
1.一种基于孪生模型的智能多模型预测控制方法,其特征在于,包括:
2.根据权利要求1所述的一种基于孪生模型的智能多模型预测控制方法,其特征在于,针对一个多工况被控系统,所述的智能多模型预测控制器最初只含有一个工况下的精确模型,进行优化控制。
3.根据权利要求2所述的一种基于孪生模型的智能多模型预测控制方法,其特征在于,当智能多模型预测控制器检测到控制性能变差后,切换至基础预测控制,待多工况被控系统稳定,在控制指令处加入激励信号,在线记录闭环响应数据,辨识器的参数范围设置为基础多模型预测控制器中相邻各个模型的参数后进行在线闭环模型辨识;辨识完成后进行模型阶跃扰动仿真实验,完成后再进行针对实际对象的阶跃扰动试验。
4.根据权利要求3所述的一种基于孪生模型的智能多模型预测控制方法,其特征在于,根据设定值和误差幅值进行系统稳态判断,若设定值未变且误差幅值在一定区间,则认为达到稳定状态。
5.根据权利要求3所述的一种基于孪生模型的智能多模型预测控制方法,其特征在于,闭环辨识器进行多个不同工况的基础模型辨识,记住每次的辨识参数,根据当前工况与各次辨识工况中最接近原则,切换至最新的工况基础模型,其为在相应工况在线闭环辨识出的基础模型;基础预测控制切至智能预测控制进行优化控制,如果工况再次变化,控制性能再次变差,重复前述的激励和建模过程,生成对应工况的孪生模型;根据工况复杂情况,设立相应次数的孪生模型辨识、仿真与控制,当超过规定次数生成孪生模型后,则认为完成了全工况的建模。
6.根据权利要求5所述的一种基于孪生模型的智能多模型预测控制方法,其特征在于,性能判断模块根据误差的多个幅值阈值和延迟时间,判断控制性能是否合适。
7.根据权利要求5所述的一种基于孪生模型的智能多模型预测控制方法,其特征在于,在多次生成孪生模型后,在每个工况下进行精准控制,实现全工况优化控制。
8.一种基于孪生模型的智能多模型预测控制系统,其特征在于,包括:
9.根据权利要求8所述的一种基于孪生模型的智能多模型预测控制系统,其特征在于,针对一个多工况被控系统,所述的智能多模型预测控制器最初只含有一个工况下的精确模型,进行优化控制;当检测到控制性能变差后,切换至基础预测控制,待多工况被控系统稳定,在控制指令处加入激励信号,在线记录闭环响应数据,辨识器的参数范围设置为基础多模型预测控制器中相邻各个模型的参数后进行在线闭环模型辨识;辨识完成后进行模型阶跃扰动仿真实验,完成后再进行针对实际对象的阶跃扰动试验。
10.根据权利要求8所述的一种基于孪生模型的智能多模型预测控制系统,其特征在于,闭环辨识器进行多个不同工况的基础模型辨识,记住每次的辨识参数,根据当前工况与各次辨识工况中最接近原则,切换至最新工况基础模型,其为在相应工况在线闭环辨识出的基础模型;基础预测控制切至智能预测控制进行优化控制,如果工况再次变化,控制性能再次变差,重复前述的激励和建模过程,生成对应工况的孪生模型;根据工况复杂情况,设立相应次数的孪生模型辨识、仿真与控制,当超过规定次数生成孪生模型后,则认为完成了全工况的建模。
技术总结
本发明公开了一种基于孪生模型的智能多模型预测控制方法及系统。本发明的智能多模型预测控制方法,其包括:以多个工况基础模型和线性插值块构造基础多模型预测控制器,在所述的基础多模型预测控制器中实现稳定控制并生成孪生模型;以多个孪生模型和选择模块构造智能多模型预测控制器;在智能多模型预测控制器中逐次进行多工况孪生模型匹配,最终实现全工况优化控制。本发明能在每个工况下进行精准控制,在线完成被控系统的诊断和优化。
技术研发人员:李泉,尹峰,张江丰,孙坚栋
受保护的技术使用者:杭州意能电力技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!