用于多星智能协作控制的地面半物理仿真平台系统及方法
本发明属于卫星,具体涉及一种用于多星智能协作控制的地面半物理仿真平台系统及方法。
背景技术:
1、随着空间技术的不断发展,空间非合作目标抵近与近距离在轨操作技术逐渐成熟,空间安全成为涉及国家安全与利益的重要领域。为争夺这一新的战略高地,确保在未来空间发展中获得主动权,美俄等航天大国相继成立天军部队,将太空视为新的发展领域。由此可见,空间协作博弈控制已成为当今航天领域的重要方向,对维护国家安全和空间资产有重要意义。微纳卫星是一种低成本的空间航天器,多航天器间的协作博弈控制逐渐成为未来太空资源争夺的重要方法。多个航天器可以通过与周围环境进行交互,获取周围环境的参数判断周围形势,依据一定的攻防追击围捕策略,采取多种动作行为,实现多星协作博弈控制。
2、微纳卫星地面仿真可以分为纯数学数字仿真,半实物仿真和全实物测试实验。微纳卫星在比较特殊环境下运行工作,试验验证是整体研发中的一个重要的环节,由于航天系统的全实物试验成本过高,时间长,不利于微纳卫星的研发,所以引进了半物理仿真技术,这种测试方法成本低,时间短,能够大幅度的减少开发周期。
3、通过查阅相关资料,现有微纳卫星的半物理仿真系统所使用的气浮平台均存在智能化、集成化程度低的问题。
技术实现思路
1、本发明提出了一种用于多星智能协作控制的地面半物理仿真平台系统及方法,解决现有卫星地面半物理仿真系统智能化、集成化程度低,不能完成多星的协作配合、调配控制任务等问题。
2、实现本发明的技术解决方案为:一种用于多星智能协作控制的地面半物理仿真平台系统,包括地面综合测控系统、监测摄像头、大理石平面、气浮模拟卫星和气浮平台;每个气浮模拟卫星固连在一个气浮平台顶面,至少三个气浮模拟卫星放置在大理石平面上,监测摄像头用于监测并反馈气浮模拟卫星的位姿状态信息,并将采集到的信息传输至地面综合测控系统,用于对深度强化学习模型的训练效果进行检验;在大理石平面上一部分气浮模拟卫星组成一个编队定义为追击星,剩余气浮模拟卫星设为目标星,通过在追击星和目标星上运行设置有不同奖励函数的深度强化学习模型来实现多星间的智能协作控制。
3、一种用于多星智能协作控制的地面半物理仿真平台系统的协同控制方法,步骤如下:
4、步骤1、系统上电,激光雷达旋转探测出周围障碍物和目标的位置,并将数据传输给ai处理器用于对三维地形的建模为协作控制导航和避障提供位置依据。
5、步骤2、使用非合作目标相机和合作目标相机来识别与其他气浮模拟卫星的立体靶标之间的距离来实时确定各个气浮模拟卫星之间的相对距离,并且将数据通过串口或usb传输至ai处理器中,为深度强化学习模型训练提供输入参数的参考值。
6、步骤3、通过陀螺仪提供准确的速度和加速度信息,并通过串口将这些信息传至ai处理器中,为深度强化学习模型获取自身位置速度信息提供依据,同时也是模型训练的重要输入参数。
7、步骤4、将上述ai处理器所获得的自身和对方的位置速度信息作为输入传入深度强化学习模型中,深度强化学习模型将输出相应的动作参数;同时将输入的位置速度参数和输出的动作参数作为一次数据存入经验池中用于深度强化学习模型的后续更新。
8、步骤5、将获得的动作ai通过串口传输至星务计算机中,星务计算机根据获取的推力值,控制气浮平台上的推力器产生相应的推力,进而实现对气浮模拟卫星的运动控制,同时星务计算机需要根据所获取的位姿信息控制动量轮转动实现卫星整体的平衡;
9、步骤6、地面综合测控系统与气浮模拟卫星通信进行模拟真实卫星与地面站间的上下行通信,气浮模拟卫星发送自身相应位置速度参数,地面综合测控系统则发送相关控制指令实现对气浮模拟卫星的远程实时控制;地面综合测控系统根据所的得到的位置速度信息与监测摄像头所拍摄画面进行综合分析,验证所训练的深度强化学习模型算法的实用性和准确性;再根据多星智能协作配合轨迹和实际捕获成功率来检验协作控制的有效性。
10、本发明与现有技术相比,其显著优点在于:
11、(1)气浮模拟卫星采用层式结构,具有较好的通用性,可以适配不同的配件进行测试。
12、(2)气浮模拟卫星整体结构与传统微纳卫星较为相似,可以在最大程度上模拟真实卫星在太空中的实际运行状况。
13、(3)非合作目标相机和合作目标相机共同构成视觉导航系统,可以同时实现对合作目标和非合作目标的位姿识别。
14、(4)结合了深度强化学习模型实现多星的协作配合,具有自行训练能力,能够自主学习,在实时获取位姿信息的基础上可以实现实时的训练更新,提升系统整体的智能化程度。
技术特征:
1.一种用于多星智能协作控制的地面半物理仿真平台系统,其特征在于:包括地面综合测控系统(1)、监测摄像头(2)、大理石平面(3)、气浮模拟卫星(4)和气浮平台(18);每个气浮模拟卫星(4)固连在一个气浮平台(18)顶面,至少三个气浮模拟卫星(4)放置在大理石平面(3)上,监测摄像头(2)用于监测并反馈气浮模拟卫星(4)的位姿状态信息,并将采集到的信息传输至地面综合测控系统(1),用于对深度强化学习模型的训练效果进行检验;在大理石平面(3)上一部分气浮模拟卫星(4)组成一个编队定义为追击星,剩余气浮模拟卫星(4)设为目标星,通过在追击星和目标星上运行设置有不同奖励函数的深度强化学习模型来实现多星间的智能协作控制。
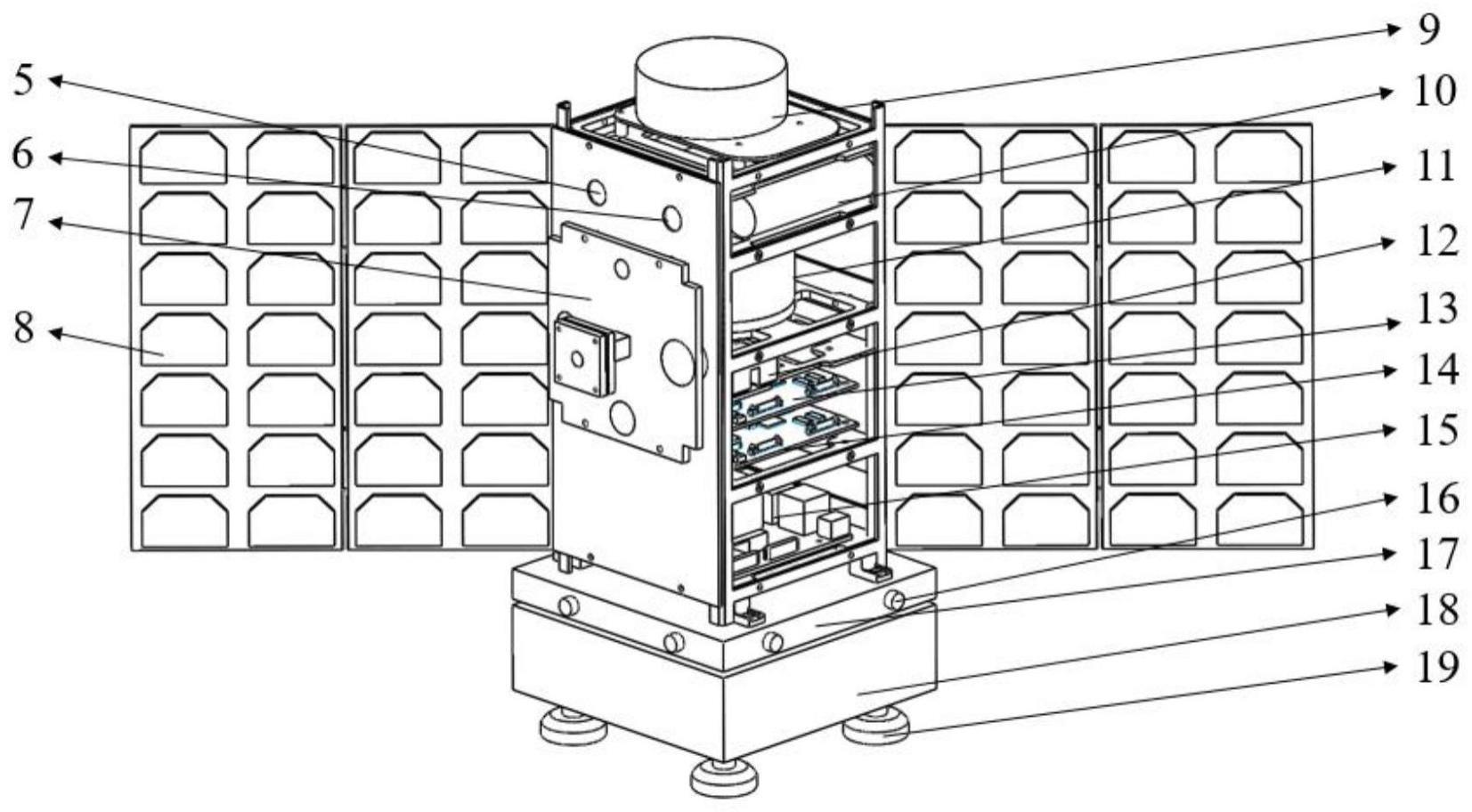
2.根据权利要求1所述的用于多星智能协作控制的地面半物理仿真平台系统,其特征在于:气浮模拟卫星(4)包括非合作目标相机(5)、合作目标相机(6)、立体靶标(7)、太阳帆板(8)、激光雷达(9)、蓄电池组(10)、动量轮(11)、陀螺仪(12)、电源控制板(13)、星务计算机(14)、ai处理器(15)、后侧框架(20)、左侧框架(21)、前侧框架(22)、右侧框架(23)、顶端框架(24)、激光雷达底板(25)、电源底板(26)、中部框架(27)、陀螺仪底板(28)、星务计算机底板(29)、ai处理器底板(30)、底部框架(31);后侧框架(20)分别与顶端框架(24)、中部框架(27)、底部框架(31)的后侧固连;左侧框架(21)分别与顶端框架(24)、中部框架(27)、底部框架(31)的左侧固连;前侧框架(22)分别与顶端框架(24)、中部框架(27)、底部框架(31)的前侧固连;右侧框架(23)分别与顶端框架(24)、中部框架(27)、底部框架(31)的右侧固连;激光雷达(9)固连在激光雷达底板(25)顶面;非合作目标相机(5)、合作目标相机(6)和立体靶标(7)均固连在左侧框架(21)外壁上;动量轮(11)固连在中部框架(27)顶面;陀螺仪(12)和电源控制板(13)固连在陀螺仪底板(28)顶面;星务计算机(14)固连在星务计算机底板(29)顶面;ai处理器(15)固连在ai处理器底板(30)顶面;激光雷达底板(25)、电源底板(26)、中部框架(27)、陀螺仪底板(28)、星务计算机底板(29)和ai处理器底板(30)通过使用四周的六角螺柱实现自上而下的竖向串接固连,固连完成后将这四个六角螺柱的两端分别与顶端框架(24)和底部框架(31)相连接。
3.根据权利要求2所述的用于多星智能协作控制的地面半物理仿真平台系统,其特征在于:气浮平台(18)包括气瓶、推力器喷口(16)、推力器(17)和若干模拟气足(19);推力器喷口(16)和推力器(17)固定于气瓶顶端,若干模拟气足(19)均匀设置在气瓶底面。
4.根据权利要求3所述的用于多星智能协作控制的地面半物理仿真平台系统,其特征在于:地面综合测控系统(1)与多个气浮模拟卫星(4)之间使用wifi进行通信连接;非合作目标相机(5)、合作目标相机(6)、激光雷达(9)、陀螺仪(12)分别与ai处理器(15)相互间进行通信连接;动量轮(11)、气浮平台(18)分别与星务计算机(14)间进行通信连接;电源控制板(13)与蓄电池组(10)连接后再给各个气浮模拟卫星(4)进行供电;
5.一种用于多星智能协作控制的地面半物理仿真平台系统的协同控制方法,其特征在于,步骤如下:
6.根据权利要求5所述的用于多星智能协作控制的地面半物理仿真平台系统的协同控制方法,其特征在于,步骤4中,将上述ai处理器(15)所获得的自身和对方的位置速度信息作为输入传入深度强化学习模型中,深度强化学习模型将输出相应的动作参数;同时将输入的位置速度参数和输出的动作参数作为一次数据存入经验池中用于深度强化学习模型的后续更新,具体如下:
技术总结
本发明公开了一种用于多星智能协作控制的地面半物理仿真平台系统及方法,包括多个气浮模拟卫星、地面综合测控系统、监测摄像头和大理石平台。地面综合测控系统与气浮模拟卫星间采用WiFi通信方式,分别实现星间信息共享以及模拟星地上下行通信。气浮模拟卫星在结构上采用传统的微纳卫星构型,以提高仿真环境真实性。半物理仿真平台系统包含多颗追击气浮模拟卫星和目标气浮模拟卫星,追击星和目标星通过多种传感器来感知外界环境,结合智能协作控制策略,实现协作配合/突围等目标,并具备控制策略的实时进化能力。
技术研发人员:廖文和,陈俊宇,范书珲,张翔
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!