机器人返回基站的路径规划方法、可移动机器人及基站与流程
本申请涉及计算机软件,特别是涉及一种机器人返回基站的路径规划方法、可移动机器人及基站。
背景技术:
1、随着机器人技术的发展,可移动机器人的智能化程度越来越高。为了实现可移动机器人的自动充电、清洗等功能,都会给可移动机器人配备一个基站。在可移动机器人完成任务后或者电量快要耗尽时,可移动机器人会导航至基站实现充电或其他任务。
2、在正常情况下,可移动机器人与基站之间的位置是已知的,可移动机器人可以直接进行路径规划并导航到基站。但是在有些特殊情况下,可移动机器人与基站之间的位置关系会丢失,这样可移动机器人就需要进行基站探索,而基站探索的过程需要耗费大量的时间,大大影响机器人返回基站的效率。
技术实现思路
1、本申请至少提供一种机器人返回基站的路径规划方法、可移动机器人及基站。
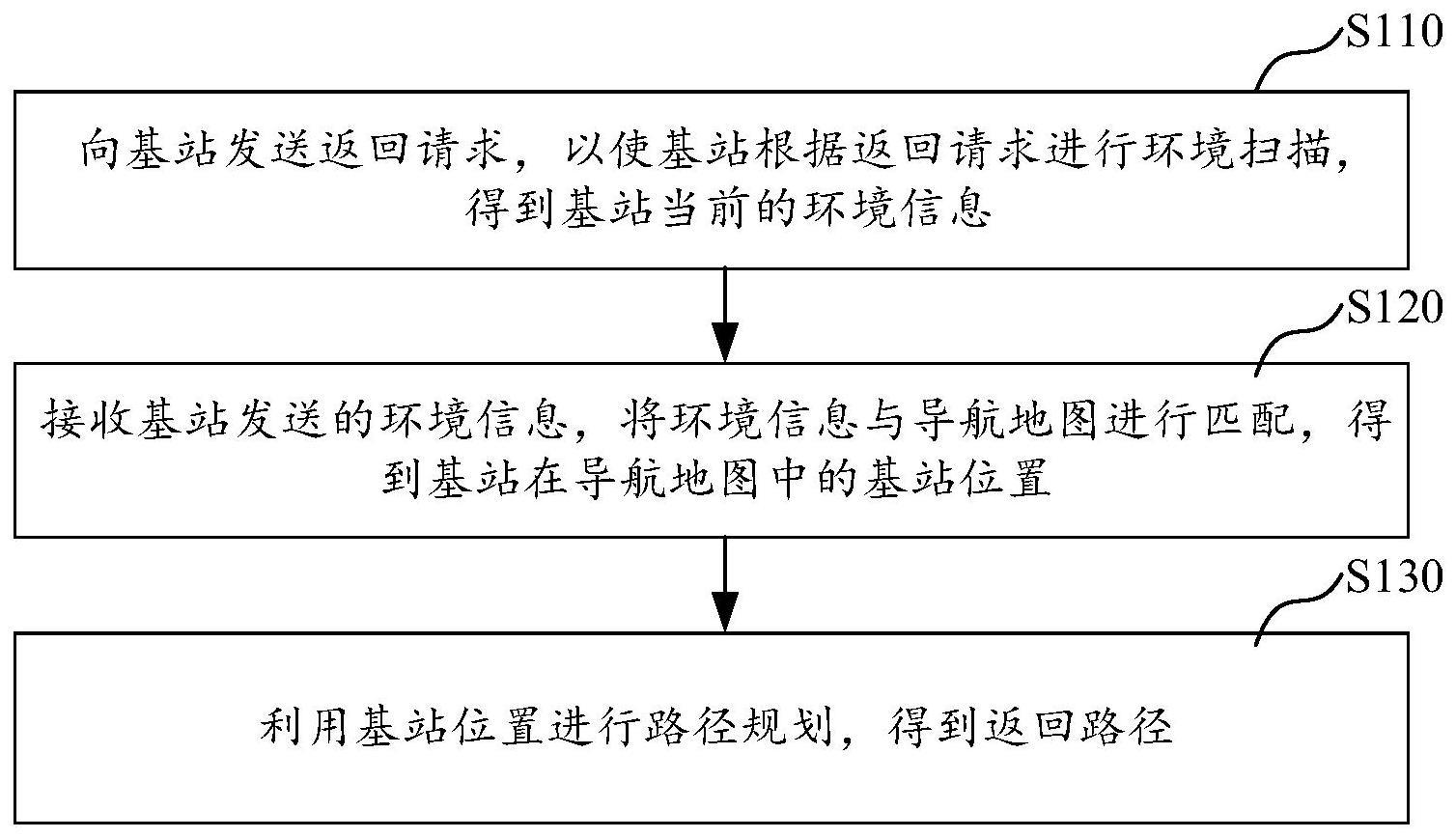
2、本申请第一方面提供了一种机器人返回基站的路径规划方法,应用于可移动机器人,方法包括:向基站发送返回请求,以使基站根据返回请求进行环境扫描,得到基站当前的环境信息;接收基站发送的环境信息,将环境信息与导航地图进行匹配,得到基站在导航地图中的基站位置;利用基站位置进行路径规划,得到返回路径。
3、在一实施例中,将环境信息与导航地图进行匹配,得到基站在导航地图中的基站位置,包括:对环境信息进行特征提取,得到基站对应的基站环境特征;以及,对导航地图进行特征提取,得到导航地图对应的地图特征;将基站环境特征和地图特征进行匹配,得到基站在导航地图中的基站位置。
4、在一实施例中,将基站环境特征和地图特征进行匹配,得到基站在导航地图中的基站位置,包括:对基站环境特征和地图特征进行匹配,得到环境信息与导航地图中的局部地图之间的匹配度;选取匹配度满足预设条件的局部地图作为目标局部地图,获取目标局部地图在导航地图中的地图位置;将地图位置转换为基站在导航地图中的基站位置。
5、在一实施例中,利用基站位置进行路径规划,得到返回路径,包括:获取可移动机器人相对导航地图的位置,得到机器人位置;基于机器人位置和基站位置,从导航地图中提取出候选路径;计算每个候选路径的推荐指数,根据推荐指数从每个候选路径中选取出返回路径。
6、在一实施例中,基站在导航地图中的基站位置的数量为多个;基于机器人位置和基站位置,从导航地图中提取出候选路径,包括:将机器人位置作为起点、每个基站位置作为候选终点,从导航地图中提取出候选路径,候选路径遍历每个候选终点。
7、在一实施例中,将机器人位置作为起点、每个基站位置作为候选终点,从导航地图中提取出候选路径,包括:获取每个候选终点对应的环境信息与导航地图之间的匹配度;基于每个候选终点对应的匹配度,确定每个候选终点之间的遍历次序;基于遍历次序从导航地图中提取出候选路径。
8、在一实施例中,计算每个候选路径的推荐指数,根据推荐指数从每个候选路径中选取出返回路径,包括:基于每个候选路径的路径长度和每个候选路径含有的转弯数量,计算每个候选路径的推荐指数;将推荐指数最高的候选路径作为返回路径。
9、本申请第二方面提供了一种机器人返回基站的路径规划方法,应用于基站,方法包括:接收可移动机器人发送的返回请求;根据返回请求进行环境扫描,得到基站当前的环境信息;将环境信息发送给可移动机器人,以使可移动机器人将环境信息与导航地图进行匹配,得到基站在导航地图中的基站位置,并利用基站位置进行路径规划,得到返回路径。
10、本申请第三方面提供了一种基站,包括基站环境扫描装置,基站环境扫描装置用于进行环境扫描得到基站当前的环境信息;第一控制器,第一控制器用于实现上述机器人返回基站的路径规划方法。
11、本申请第四方面提供了一种可移动机器人,包括机器人环境扫描装置,机器人环境扫描装置用于进行环境扫描得到导航地图;其中,机器人环境扫描装置和基站对应的基站环境扫描装置属于相同类型;第二控制器,第二控制器用于实现上述机器人返回基站的路径规划方法。
12、本申请第五方面提供了一种机器人返回基站的路径规划装置,部署于可移动机器人,装置包括:请求发送模块,用于向基站发送返回请求,以使基站根据返回请求进行环境扫描,得到基站当前的环境信息;匹配模块,用于接收基站发送的环境信息,将环境信息与导航地图进行匹配,得到基站在导航地图中的基站位置;路径规划模块,用于利用基站位置进行路径规划,得到返回路径。
13、本申请第六方面提供了一种机器人返回基站的路径规划装置,部署于基站,装置包括:请求接收模块,用于接收可移动机器人发送的返回请求;环境扫描模块,用于根据返回请求进行环境扫描,得到基站当前的环境信息;信息返回模块,用于将环境信息发送给可移动机器人,以使可移动机器人将环境信息与导航地图进行匹配,得到基站在导航地图中的基站位置,并利用基站位置进行路径规划,得到返回路径。
14、本申请第七方面提供了一种计算机可读存储介质,其上存储有程序指令,程序指令被处理器执行时实现上述机器人返回基站的路径规划方法。
15、上述方案中,可移动机器人通过向基站发送返回请求,以使基站根据返回请求进行环境扫描,得到基站当前的环境信息;接收基站发送的环境信息,将环境信息与导航地图进行匹配,得到基站在导航地图中的基站位置;利用基站位置进行路径规划,得到返回路径。由于在可移动机器人返回基站时,获取了基站当前的环境信息,使得可移动机器人可以根据该环境信息对基站进行定位,进而避免基站的位置发生变化,或者可移动机器人丢失基站的位置信息后,可移动机器人难以确认基站位置的问题,提高可移动机器人返回基站的效率。
16、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本申请。
技术特征:
1.一种机器人返回基站的路径规划方法,其特征在于,应用于可移动机器人,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述将所述环境信息与导航地图进行匹配,得到所述基站在所述导航地图中的基站位置,包括:
3.根据权利要求2所述的方法,其特征在于,所述将所述基站环境特征和所述地图特征进行匹配,得到所述基站在所述导航地图中的基站位置,包括:
4.根据权利要求1所述的方法,其特征在于,所述利用所述基站位置进行路径规划,得到返回路径,包括:
5.根据权利要求4所述的方法,其特征在于,所述基站在所述导航地图中的基站位置的数量为多个;所述基于所述机器人位置和所述基站位置,从所述导航地图中提取出候选路径,包括:
6.根据权利要求5所述的方法,其特征在于,所述将所述机器人位置作为起点、每个基站位置作为候选终点,从所述导航地图中提取出候选路径,包括:
7.根据权利要求4所述的方法,其特征在于,所述计算每个候选路径的推荐指数,根据所述推荐指数从所述每个候选路径中选取出返回路径,包括:
8.一种机器人返回基站的路径规划方法,其特征在于,应用于基站,所述方法包括:
9.一种基站,其特征在于,包括:
10.一种可移动机器人,其特征在于,包括:
技术总结
本申请公开了一种机器人返回基站的路径规划方法、可移动机器人及基站,该机器人返回基站的路径规划方法包括:向基站发送返回请求,以使基站根据返回请求进行环境扫描,得到基站当前的环境信息;接收基站发送的环境信息,将环境信息与导航地图进行匹配,得到基站在导航地图中的基站位置;利用基站位置进行路径规划,得到返回路径。由于在可移动机器人返回基站时,获取了基站当前的环境信息,使得可移动机器人可以根据该环境信息对基站进行定位,进而避免基站的位置发生变化,或者可移动机器人丢失基站的位置信息后,可移动机器人难以确认基站位置的问题,提高可移动机器人返回基站的效率。
技术研发人员:涂曙光,马子昂
受保护的技术使用者:杭州华橙软件技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!