基于扰动观测器的车辆队列免通信连续二阶滑模控制方法
本发明涉及智能驾驶,具体指一种基于扰动观测器的车辆队列免通信连续二阶滑模控制方法。
背景技术:
1、随着科技的快速发展和社会市场经济的快速发展,人们对物质生活的需求显著提高,汽车作为代步工具深入人们的生活中,为人们的出行带来了极大的便利。不过,越来越多汽车的出现在给人们带来大量益处的同时,也使得城市道路拥挤成为一个日益严重的问题。因此,智能驾驶领域作为未来城市智能交通系统的重要组成部分,实现车辆队列控制在缓解交通拥堵、提高道路利用率、提高公路安全性、优化能源效率等方面的都有着极大的优势,近年来也引起了非常广泛的研究。滑模控制方法由于能够有效地处理扰动和模型不确定性,已经在机器人、电驱系统和车辆控制等多个领域得到了应用。许多基于滑模控制的控制算法,与其他技术相结合,都被广泛用于车辆队列控制。
2、在车辆队列控制过程中,个体稳定性和弦稳定性是两个重要的性能指标,但是当车辆前方扰动较大时,满足个体稳定性的车辆队列仍然可能发生车辆碰撞,需要采用更优的控制策略,设计更好的控制器来保证车辆安全。因此,为了更大程度地提升车辆队列在行驶过程中的稳定性,本申请提出了一种基于扰动观测器的车辆队列免通信连续二阶滑模控制方法。
技术实现思路
1、本发明针对现有技术的不足,提出一种基于扰动观测器的车辆队列免通信连续二阶滑模控制方法,与传统的滑模控制方法相比,本发明所提出的二阶滑模控制方法大大提升了收敛速度和抖振缓解。
2、为了解决上述技术问题,本发明的技术方案为:
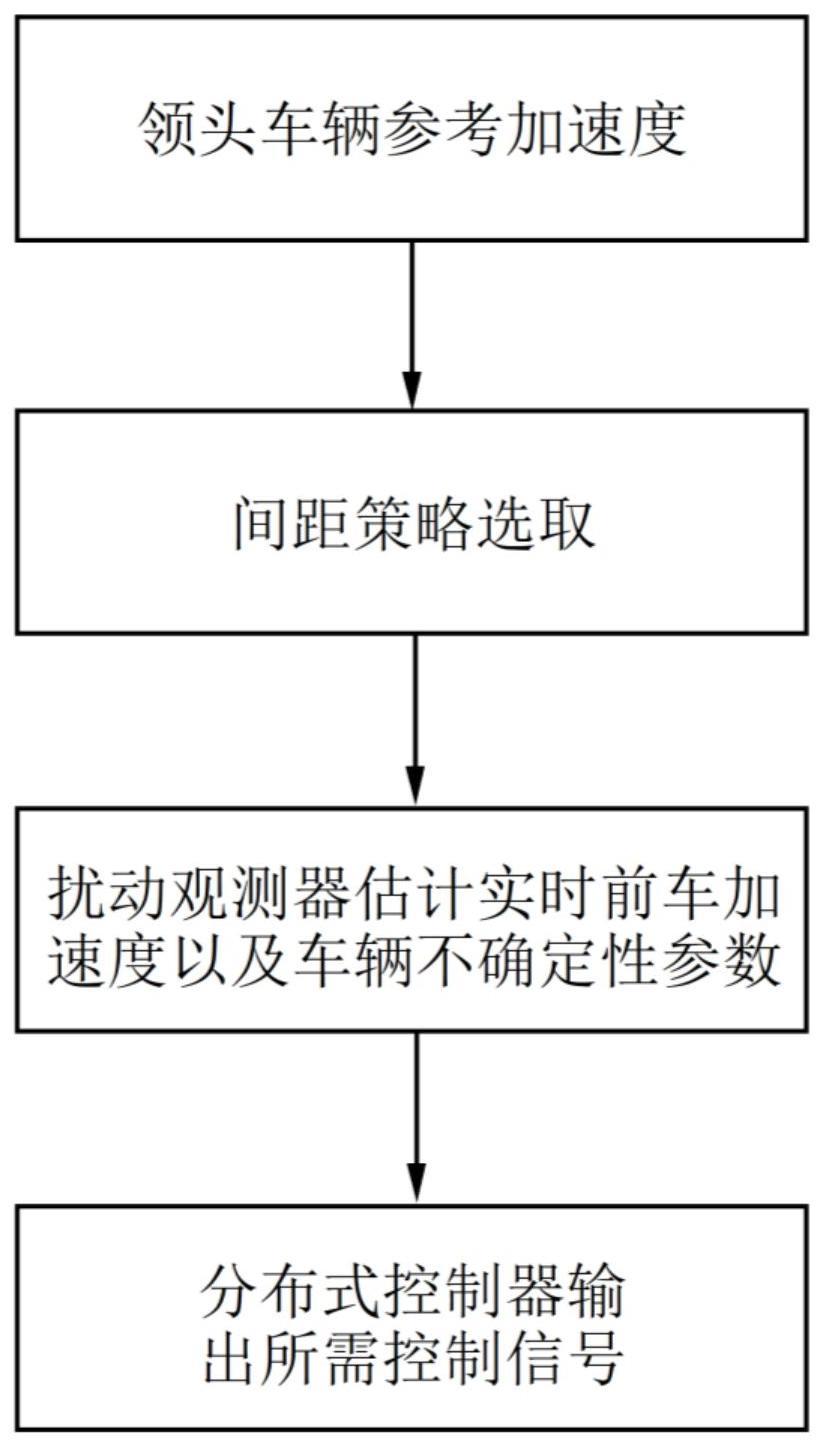
3、一种基于扰动观测器的车辆队列免通信连续二阶滑模控制方法的具体步骤如下:
4、s1、根据车辆自身参数建立领头车辆(i=0)以及跟随车辆(i=1,...,n)的纵向动力学模型,
5、领头车辆i0的纵向动力学模型,表达式如下:
6、
7、其中,p0(t),v0(t),a0(t),ades(t)分别为领头车辆(i=0)的位置、速度、实际加速度和期望加速度,τ0表示领头车辆的发动机滞后时间常数;
8、跟随车辆ith的纵向动力学模型,表达式如下:
9、
10、上式中,pi(t),vi(t)表示第i个跟随车辆的位置和速度;ui(t)是控制输入信号,可以看作是期望实现的加速度;δi(t)表示外部扰动;是滞后时间常数τi的标称值;δτi是与τi的真实值之间的偏差;
11、s2、确定控制目标,所述控制目标的确定条件包括确保个体稳定性和弦稳定性;
12、s3、针对选择的目标,搭建出相应的误差模型,并给出基于扰动观测器的分布式连续二阶滑模控制策略:
13、采用ccth策略搭建误差模型,表达式如下:
14、
15、采用rcth策略搭建误差模型,表达式如下:
16、
17、s4、基于扰动观测器的分布式连续二阶滑模控制策略输出所需控制信号控制车辆队列。
18、作为优选,跟随车辆ith的纵向动力学模型可以被进一步表示为:
19、
20、其中i=1,...,n。
21、上式中,di(t)是未知边界的不确定性参数,包含外部扰动、参数不确定性甚至建模误差等。
22、作为优选,式中δi(t)可表示为:
23、
24、上式中,mi是车辆ith的质量。
25、本发明具有以下的特点和有益效果:
26、采用上述技术方案,本发明相比于其他控制方法,在整车动力学建模和控制器设计中充分考虑了发动机时滞、外部扰动和参数不确定性带来的影响,将参数不确定性和外部扰动以两种形式分别作用于车辆队列系统,进一步提高了车辆队列系统的抗扰性能。
27、本发明所提出的两种基于二阶超扭算法(sta)的ccth和rcth策略都不需要来自前车的信息(例如,车辆通信),且能有效保证车辆队列的个体稳定性和弦稳定性。
28、本发明所提出的新型rcth策略,能够消除由非零初始间距误差导致的较大瞬态发动机扭矩和制动扭矩。与其他技术中提出的mcth策略相比,在不需要改变信息流拓扑的情况下,即可实现与恒定间距策略类似的小稳态跟随距离,即无需额外的通信负担,这使得所提出的新型rcth策略具有更广泛的适用性。
技术特征:
1.一种基于扰动观测器的车辆队列免通信连续二阶滑模控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于扰动观测器的车辆队列免通信连续二阶滑模控制方法,其特征在于,所述步骤s1中,由于跟随车辆ith受外界不确定性影响,纵向动力学模型可以被进一步表示为:
3.根据权利要求1所述的基于扰动观测器的车辆队列免通信连续二阶滑模控制方法,其特征在于,所述个体稳定性指的是队列中的所有车辆在以一致速度行驶时保持期望的间距;所述弦稳定性指的是领头车辆和跟随车辆的距离误差在车辆队列行驶时不会变大。
4.根据权利要求1所述的基于扰动观测器的车辆队列免通信连续二阶滑模控制方法,其特征在于,所述个体稳定性,当领头车辆的加速度为0时,所有跟随车辆都停留在所需位置,并最终达到与领头车辆相同的速度,即:
5.根据权利要求1所述的基于扰动观测器的车辆队列免通信连续二阶滑模控制方法,其特征在于,所述弦稳定性条件为:
6.根据权利要求1所述的基于扰动观测器的车辆队列免通信连续二阶滑模控制方法,其特征在于,所述步骤s3中,ccth策略下的跟车误差模型搭建方法为:
7.根据权利要求6所述的基于扰动观测器的车辆队列免通信连续二阶滑模控制方法,其特征在于,采用ccth策略时,设计基于扰动观测器的车辆队列滑模控制策略:
8.根据权利要求1所述的基于扰动观测器的车辆队列免通信连续二阶滑模控制方法,其特征在于,所述步骤s3中,rcth策略下的跟车误差模型搭建方法为:
9.根据权利要求8所述的基于扰动观测器的车辆队列免通信连续二阶滑模控制方法,其特征在于,采用rcth策略时,设计基于扰动观测器的车辆队列滑模控制策略:
技术总结
本发明公开了一种基于扰动观测器的车辆队列免通信连续二阶滑模控制方法的具体步骤如下:S1、根据车辆自身参数建立领头车辆以及跟随车辆的纵向动力学模型,S2、确定控制目标,所述控制目标的确定条件包括确保个体稳定性和弦稳定性;S3、针对选择的目标,搭建出相应的误差模型,并给出基于扰动观测器的分布式连续二阶滑模控制策略;S4、基于扰动观测器的分布式连续二阶滑模控制策略输出所需控制信号控制车辆队列。与传统的滑模控制方法相比,本发明所提出的二阶滑模控制方法大大提升了收敛速度和抖振缓解。
技术研发人员:周豪杰,翟春杰,詹一笑,龙翔,尹克,陈楚翘,陈慧勤
受保护的技术使用者:杭州电子科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!