一种面向智能环卫机具的人机协同作业方法与流程
本发明涉及环卫作业,具体为一种面向智能环卫机具的人机协同作业方法。
背景技术:
1、环卫工作是城市管理的重要组成部分,随着社会的发展,人们生活水平不断提高,城市人口越来越多,环卫工作量越来越大,传统的环卫工作模式已经不能满足现代环卫行业的发展。城市道路洒水车主要以人工驾驶为主,人工驾驶方式下环卫作业人员劳动强度大、作业效率低、安全风险高、作业成本高。其次,环卫作业人员无法对传统的智能环卫机具进行远程操控和远程监管,在作业中需要频繁往返与作业区域和车之间,频繁的被迫中断作业进程,会增加作业时间和费用,降低作业效率,如专利公开号为cn108508892a所公开的一种自动跟随环卫车系统,其公开了环卫车自动跟随作业,采用环卫工人携带标签模块,通过标签模块和环卫车上的基站模块实现控制环卫车,无法做到远程操控和监管。
技术实现思路
1、本发明的目的在于提供一种面向智能环卫机具的人机协同作业方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种面向智能环卫机具的人机协同作业方法,基于人机协同系统和环卫机具,所述人机协同系统包含前端界面和后端控制平台,所述前端界面设有自动跟随作业模式单元,所述自动跟随作业模式单元包含视频接入模块、目标选择模块和自动跟随模式模块,包括如下步骤:
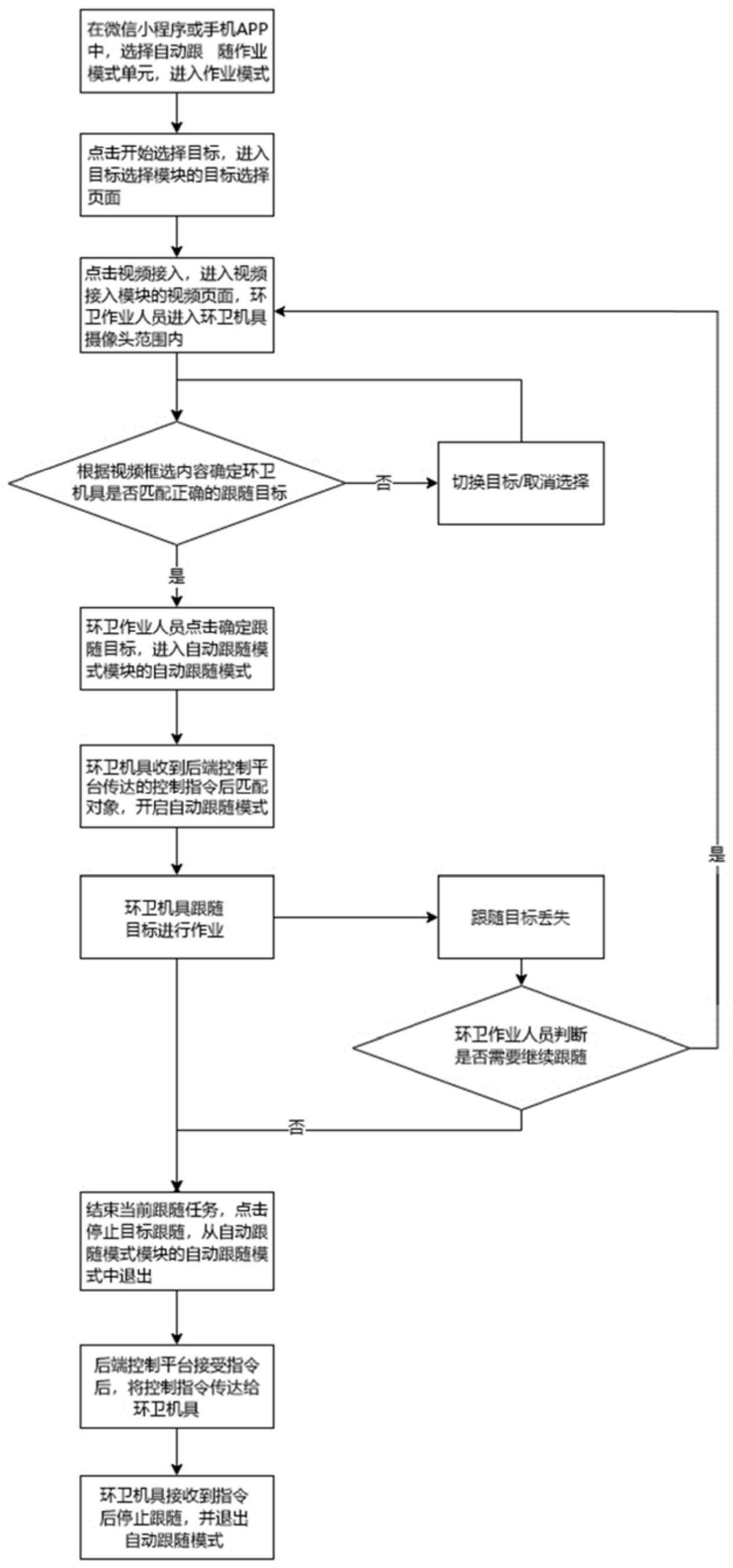
3、步骤一、环卫作业人员在微信小程序或手机app中,登录人机协同系统的前端界面,选择自动跟随作业模式单元,进入作业模式;
4、步骤二、点击开始选择目标,进入目标选择模块的目标选择页面;
5、步骤三、环卫作业人员点击视频接入,进入视频接入模块的视频页面,环卫人员进入环卫机具的摄像头可视范围内,确保目标数据被正确采集及处理;
6、步骤四、根据视频框选内容确定环卫机具是否匹配正确的跟随目标,如果是,进入下一步操作;如果否,则点击切换目标或取消选择,重新匹配;
7、步骤五、环卫作业人员点击确定跟随目标,进入自动跟随模式模块的自动跟随模式;
8、步骤六、后端控制平台接收到控制指令后,将匹配指令传达到环卫机具,环卫机具收到控制指令后,成功匹配对象,开启自动跟随模式;
9、步骤七、环卫机具根据指令跟随目标进行作业,若环卫机具跟随目标丢失,环卫作业人员判断是否需要继续跟随,若否,则执行步骤八;若是,则返回步骤三重新执行;
10、步骤八、结束当前跟随任务,点击停止目标跟随,从自动跟随模式模块的自动跟随模式中退出;
11、步骤九、后端控制平台接受指令后,将控制指令传达给环卫机具;
12、步骤十、环卫机具接收到指令后停止跟随,并退出自动跟随模式。
13、进一步优选,所述前端界面设有注册和登陆单元、设备详情单元、设备参数设置单元以及用户管理单元。通过注册和登陆单元实现环卫作业人员的登陆及与环卫机具的匹配,通过设备详情单元用于展示当前协同作业的环卫机具的实时状态数据,通过设备参数设置单元用于环卫作业人员根据实际路况或作业需求对环卫机具的相对于跟随目标的速度和距离进行调整,通过用户管理单元用于环卫作业人员登陆信息的管理。
14、进一步优选,所述设备详情单元包含环卫机具的车辆状态,所述车辆状态包含速度、作业模式、电量和在线情况,便于环卫作业人员根据作业需求或实际路况选择匹配的环卫机具。
15、进一步优选,所述车辆状态的作业模式分为手动驾驶模式和自动跟随模式,方便环卫作业人员对环卫机具的操控。
16、进一步优选,所述环卫机具设有激光雷达、毫米波雷达和摄像头,实现对环卫机具的自动驾驶。
17、进一步优选,所述环卫机具与后端控制平台的数据传输方式为mqtt协议和视频流服务,通过mqtt协议实现传输状态数据及任务传输,通过视频流服务实现传输实时视频数据。
18、进一步优选,所述人机协同系统采用uniapp框架,能够实现一套代码在多个平台上运行。
19、进一步优选,所述前端界面与后端控制平台通过websocket进行通信,能够将后端控制平台处理后的结果发送给前端界面进行展示。
20、进一步优选,所述前端界面采用vue.js开发框架,结合了uview组件开发、数据驱动视图等功能,实现使用vue.js编写一套代码,可发布到多个平台,并保证前端界面的美观、流畅与稳定的渲染。
21、进一步优选,所述后端控制平台采用yolov5单阶段目标检测算法,能对环卫机具采集到的视频数据进行分析处理,实现目标检测和识别功能,并推送视频流到云端平台。
22、有益效果:本发明的面向智能环卫机具的人机协同作业方法,通过微信小程序或手机app上的人机协同系统对环卫机具进行操作,能够有效提升环卫工作效率,减少了环卫作业人员的劳动强度,大大降低了环卫作业人员的工资成本,同时也能为城市道路清洁工作提供更多的人力资源,对降低环卫作业人员的工作强度,改善环卫作业人员的工作条件起到积极作用,能够解决环卫作业人员数量不足、劳动力短缺的问题;环卫机具可以与环卫作业人员保持距离,从而避免了环卫作业人员被车撞到的风险,以及车辆与环卫作业人员发生碰撞所造成的人身伤害,降低环卫成本,提高环卫作业安全性;该人机协同作业方法能够有效提高环卫机具的智能化水平,实现自动驾驶作业,通过对能源的有效管理和应用,可有效降低环卫机具的能源消耗及碳排放,在提高清洁效果的同时也降低了对环境的污染,绿色环保。
技术特征:
1.一种面向智能环卫机具的人机协同作业方法,基于人机协同系统和环卫机具,所述人机协同系统包含前端界面和后端控制平台,所述前端界面设有自动跟随作业模式单元,所述自动跟随作业模式单元包含视频接入模块、目标选择模块和自动跟随模式模块,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种面向智能环卫机具的人机协同作业方法,其特征在于:所述前端界面设有注册和登陆单元、设备详情单元、设备参数设置单元以及用户管理单元。
3.根据权利要求2所述的一种面向智能环卫机具的人机协同作业方法,其特征在于:所述设备详情单元包含环卫机具的车辆状态,所述车辆状态包含速度、作业模式、电量和在线情况。
4.根据权利要求3所述的一种面向智能环卫机具的人机协同作业方法,其特征在于:所述车辆状态的作业模式分为手动驾驶模式和自动跟随模式。
5.根据权利要求1所述的一种面向智能环卫机具的人机协同作业方法,其特征在于:所述环卫机具设有激光雷达、毫米波雷达和摄像头。
6.根据权利要求1所述的一种面向智能环卫机具的人机协同作业方法,其特征在于:所述环卫机具与后端控制平台的数据传输方式为mqtt协议和视频流服务。
7.根据权利要求1所述的一种面向智能环卫机具的人机协同作业方法,其特征在于:所述人机协同系统采用uniapp框架。
8.根据权利要求7所述的一种面向智能环卫机具的人机协同作业方法,其特征在于:所述前端界面与后端控制平台通过websocket进行通信。
9.根据权利要求8所述的一种面向智能环卫机具的人机协同作业方法,其特征在于:所述前端界面采用vue.js开发框架。
10.根据权利要求8所述的一种面向智能环卫机具的人机协同作业方法,其特征在于:所述后端控制平台采用yolov5单阶段目标检测算法。
技术总结
本发明公开了一种面向智能环卫机具的人机协同作业方法,基于人机协同系统和环卫机具,其作业方法包括:登录人机协同系统的前端界面,选择自动跟随作业模式单元;点击目标选择模块,进入目标选择页面;点击视频接入模块,进入环卫机具的摄像头可视范围内;确定环卫机具是否匹配正确的跟随目标;点击自动跟随模式模块;开启自动跟随模式;环卫机具根据指令跟随目标进行作业,若环卫机具跟随目标丢失,判断是否需要继续跟随,若否,则执行下一步;若是,则返回步骤三;结束当前跟随任务,停止目标跟随;将控制指令传达给环卫机具;环卫机具退出自动跟随模式。本发明的有益效果是:能够提升环卫工作效率,减少劳动强度,降低环卫成本,提高安全性。
技术研发人员:秦晓驹,梁丹苧,黄佳玲,马赛,金晓伟
受保护的技术使用者:上海复运智能科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!