一种串级扩张状态观测器的自抗扰控制方法及系统
本发明属于控制器设计,尤其涉及一种串级扩张状态观测器的自抗扰控制方法及系统。
背景技术:
1、近年来控制技术、智能算法的蓬勃发展,自抗扰控制算法及自抗扰控制控制器在抵抗扰动、抑制噪声、实时控制等方面发挥重要作用,由于自抗扰控制具有模型依赖程度低和抗扰动能力强的优势,被广泛应用于航天系统、电机系统以及机器人系统中。经典自抗扰控制控制器由跟踪微分器、非线性状态误差反馈控制律和扩张状态观测器组成。跟踪微分器用于过渡控制过程,保证跟踪输入准确性的同时降低系统超调量;非线性状态误差反馈控制律合理计算控制系统参考值和观测值的误差,实时反馈控制,有效提高控制效果;扩张状态观测器作为自抗扰控制器的关键,具有预测并补偿系统总扰动的功能,实现系统前馈控制,提升系统的抗干扰能力,降低控制器对模型依赖程度。因此,自抗扰控制器在现代控制方法中占有举足轻重的地位。
2、相较于经典自抗扰控制算法,线性自抗扰控制算法减少了整定参数个数,提高了自抗扰控制的应用领域,但是,在具有复杂扰动的实际控制系统中,线性自抗扰控制方法无法精准估计系统的外部复杂扰动,系统会出现大超调或者响应曲线发散的恶劣情况。
3、发明人发现,为进一步提高控制系统的动静态性能和增强抗扰动能力,目前研究中,引入了多种控制结构来优化自抗扰控制自抗扰控制算法。比如,锁相环观测器的加入有助于自抗扰控制算法抵抗低频扰动;级联扩张状态观测器以抑制高频噪声对系统的影响,提高了预估总扰动的准确度,但无法完全抑制复杂扰动;降阶级联扩张状态观测器与积分滑模控制的复合控制方法的提出,旨在消除总扰动。上述方法虽然在一定程度上提高系统动态性能,但均无法彻底消除复杂的总扰动对系统造成的恶劣影响,系统控制品质较差。因此,如何提升系统抵抗复杂扰动的能力和快速跟踪参考输入的性能成为了自抗扰控制研究的关键问题。
技术实现思路
1、本发明为了解决上述问题,提出了一种串级扩张状态观测器的自抗扰控制方法及系统,本发明提供一种基于串级扩张状态观测器以消除复杂扰动的改进型自抗扰控制方法,采用多项式表示被控系统的复杂总扰动,根据多项式的次数搭建串级线性扩张状态观测器,显著增强了被控系统抑制扰动的能力,提高了被控系统的动态响应能力。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
3、第一方面,本发明提供了一种串级扩张状态观测器的自抗扰控制方法,包括:
4、将被控系统中存在的复杂扰动表示为多项式的形式,根据控制精度确定多项式的最高阶次;
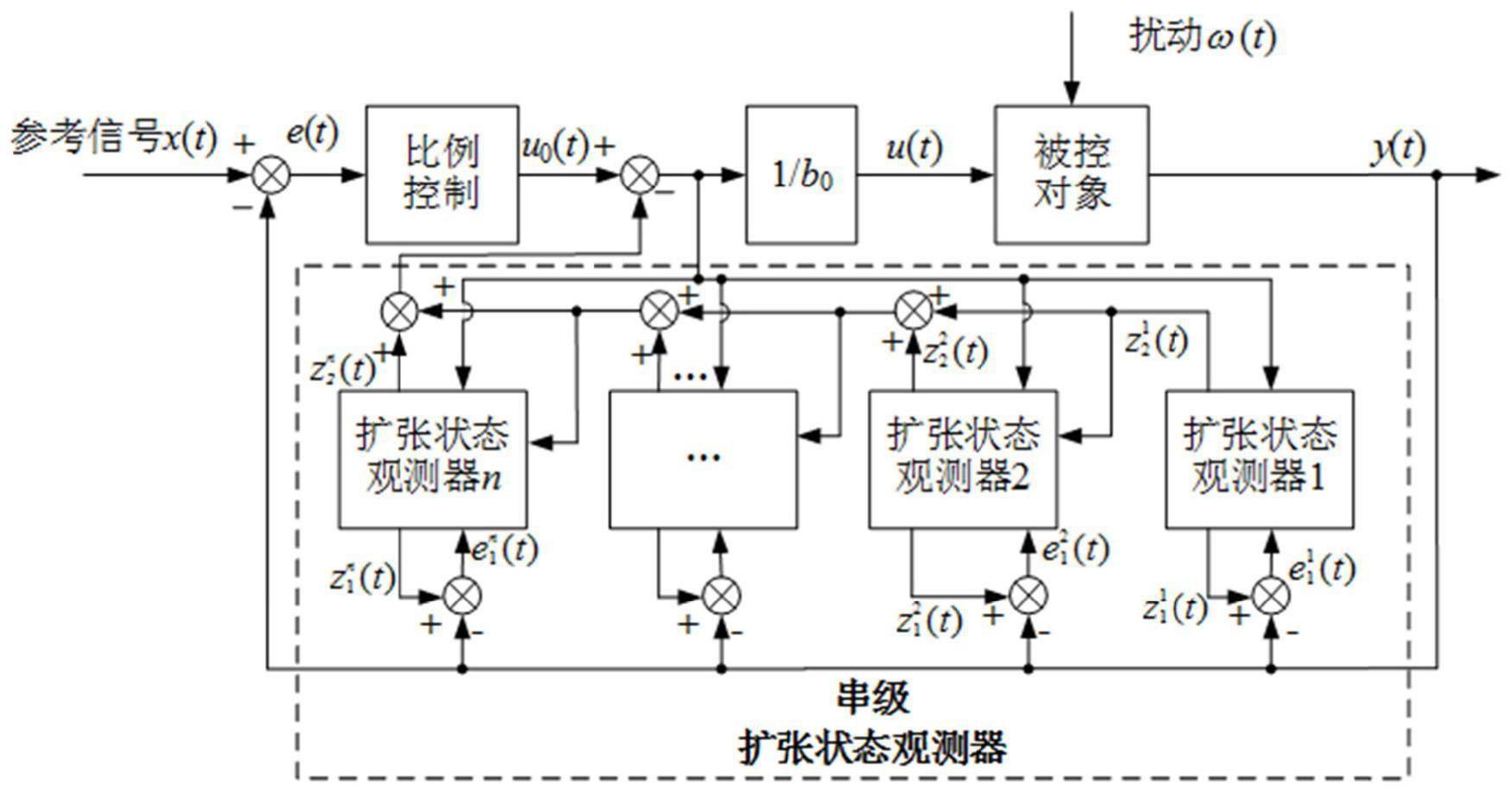
5、搭建包括多个线性扩张状态观测器的串级线性扩张状态观测器,用来估计对应阶次的多项式扰动;线性扩张状态观测器数量与多项式的次数相等;
6、根据搭建的串级线性扩张状态观测器,设计线性控制律;利用设计的线性控制律来控制消除扰动。
7、进一步的,多项式中每一项的系数为不同时刻下对应的输出增益。
8、进一步的,假设多个线性扩张状态观测器中对应位置处的观测器增益相等,推导所述串级线性扩张状态观测器的一般式。
9、进一步的,所述串级线性扩张状态观测器的一般式为:
10、
11、其中,为串级线性扩张状态观测器预测的状态值与实际状态的差值,n为常数,t为时间;和分别代表系统输出y(t)和总扰动的观测值;视为系统剩余扰动的预测值;为第(n-1)级扩张状态观测器的预测扰动;b0为控制器增益的估计值;u(t)为输入信号;为第一个线性扩张状态观测器预估的扰动值;βi和βj是串级线性扩张状态观测器的增益。
12、进一步的,各级扩张状态观测器的增益相同:βi=β1=2ω0,βj=β2=ω02,为观测器带宽。
13、进一步的,所述控制律为:
14、
15、u0(t)=kp(x(t)-y(t))
16、其中,u(t)为输入信号;u0(t)为输出信号;为总扰动的观测值;x(t)为系统输入;y(t)为系统输出;kp为比例增益。
17、进一步的,采用李雅普诺夫稳定性理论分析所述串级线性扩张状态观测器的稳定性。
18、第二方面,本发明还提供了一种串级扩张状态观测器的自抗扰控制系统,包括:
19、复杂扰动处理模块,被配置为:将被控系统中存在的复杂扰动表示为多项式的形式,根据控制精度确定多项式的最高阶次;
20、串级线性扩张状态观测器搭建模块,被配置为:搭建包括多个线性扩张状态观测器的串级线性扩张状态观测器,用来估计对应阶次的多项式扰动;线性扩张状态观测器数量与多项式的次数相等;
21、控制模块,被配置为:根据搭建的串级线性扩张状态观测器,设计线性控制律;利用设计的线性控制律来控制消除扰动。
22、第三方面,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现了第一方面所述的串级扩张状态观测器的自抗扰控制方法的步骤。
23、第四方面,本发明还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现了第一方面所述的串级扩张状态观测器的自抗扰控制方法的步骤。
24、与现有技术相比,本发明的有益效果为:
25、1、本发明将被控系统中存在的复杂扰动表示为多项式的形式,根据控制精度确定多项式的最高阶次,并根据多项式的次数搭建包括多个线性扩张状态观测器的串级线性扩张状态观测器,线性扩张状态观测器的数量决定了改进型自抗扰控制方法及控制器的级数,有效消除了被控系统中阶次不高于最高阶次的所有扰动及所有扰动线性组合后的扰动,显著增强了被控系统抑制扰动的能力,提高了被控系统的动态响应能力;
26、2、本发明推导确定了串级线性扩张状态观测器的一般式,采用李雅普诺夫第一法证明了控制器的稳定性。
技术特征:
1.一种串级扩张状态观测器的自抗扰控制方法,其特征在于,包括:
2.如权利要求1所述的一种串级扩张状态观测器的自抗扰控制方法,其特征在于,多项式中每一项的系数为不同时刻下对应的输出增益。
3.如权利要求1所述的一种串级扩张状态观测器的自抗扰控制方法,其特征在于,假设多个线性扩张状态观测器中对应位置处的观测器增益相等,推导所述串级线性扩张状态观测器的一般式。
4.如权利要求3所述的一种串级扩张状态观测器的自抗扰控制方法,其特征在于,所述串级线性扩张状态观测器的一般式为:
5.如权利要求4所述的一种串级扩张状态观测器的自抗扰控制方法,其特征在于,各级扩张状态观测器的增益相同:βi=β1=2ω0,βj=β2=ω02,ω0为观测器带宽。
6.如权利要求1所述的一种串级扩张状态观测器的自抗扰控制方法,其特征在于,所述控制律为:
7.如权利要求1所述的一种串级扩张状态观测器的自抗扰控制方法,其特征在于,采用李雅普诺夫稳定性理论分析所述串级线性扩张状态观测器的稳定性。
8.一种串级扩张状态观测器的自抗扰控制系统,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现了如权利要求1-7任一项所述的串级扩张状态观测器的自抗扰控制方法的步骤。
10.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现了如权利要求1-7任一项所述的串级扩张状态观测器的自抗扰控制方法的步骤。
技术总结
本发明属于控制器设计技术领域,提供了一种串级扩张状态观测器的自抗扰控制方法及系统,本发明将被控系统中存在的复杂扰动表示为多项式的形式,根据控制精度确定多项式的最高阶次,并根据多项式的次数搭建包括多个线性扩张状态观测器的串级线性扩张状态观测器,线性扩张状态观测器的数量决定了改进型自抗扰控制方法及控制器的级数,有效消除了被控系统中阶次不高于最高阶次的所有扰动及所有扰动线性组合后的扰动,显著增强了被控系统抑制扰动的能力,提高了被控系统的动态响应能力。
技术研发人员:鄢志丹,释修才,邓世琰,潘文涛,陈梓祥,赵世光,温明世
受保护的技术使用者:中国石油大学(华东)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!