一种飞行设备互助返航的方法和系统与流程
本发明属于无人机飞行控制,尤其涉及一种飞行设备互助返航的方法和系统。
背景技术:
1、随着无人机智能化和模块化的演进,无人机的种类越来越多。多旋翼无人机是一种具有三个及以上旋翼轴的特殊无人驾驶直升机。通过改变不同旋翼之间的相对转速,可以改变单轴推进力的大小,从而控制飞行器的运动轨迹。
2、目前旋翼无人机系统中最容易损坏,也是最容易导致飞行能力丧失的部件是螺旋桨,一旦损失动力则整架无人机就会坠毁。当无人机动力受到损失时,即便启动紧急返航或紧急降落,紧急返航或紧急降落所在的区域如果无法人工达到,也无法顺利回收,会造成很大的硬件损失和机密信息泄露。
技术实现思路
1、为解决上述技术问题,本发明提出一种飞行设备互助返航的方法和系统。
2、本发明第一方面公开了一种飞行设备互助返航的方法;所述方法包括:
3、所述方法包括:
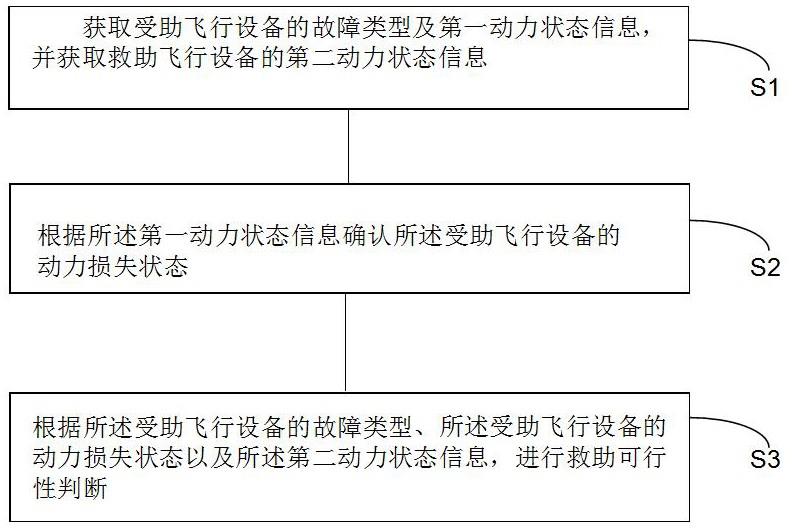
4、s1,获取受助飞行设备的故障类型及第一动力状态信息,并获取救助飞行设备的第二动力状态信息;
5、s2,根据所述第一动力状态信息确认所述受助飞行设备的动力损失状态;
6、s3,根据所述受助飞行设备的故障类型、所述受助飞行设备的动力损失状态以及所述第二动力状态信息,进行救助可行性判断;
7、步骤s3中,当所述受助飞行设备的故障类型为旋翼故障,且所述受助飞行设备的动力损失状态为一级损失状态时,根据所述第二动力状态信息和所述第一动力状态信息,进行间接救助的可行性判断,当所述间接救助的可行性判断结果为可行时,利用所述救助飞行设备对所述受助飞行设备进行间接救助;
8、当所述受助飞行设备的故障类型为机体故障,或者所述受助飞行设备的动力损失状态为二级损失状态,或者所述间接救助的可行性判断结果为不可行时,进行直接救助的可行性判断,当所述直接救助的可行性判断结果为可行时,利用所述救助飞行设备对所述受助飞行设备进行直接救助;
9、其中,所述二级损失状态的动力损失比所述一级损失状态的动力损失严重。
10、根据本发明第一方面的方法,在所述步骤s3中,包括:
11、根据所述第一动力状态信息,计算所述受助飞行设备的力平衡需求值;
12、根据所述第二动力状态信息,计算所述救助飞行设备产生的最大气流协助力值;
13、当所述力平衡需求值小于或等于所述最大气流协助力值,所述间接救助的可行性判断为可行,利用所述救助飞行设备进行间接救助。
14、根据本发明第一方面的方法,当所述力平衡需求值大于所述最大气流协助力值,所述间接救助的可行性判断为不可行。
15、根据本发明第一方面的方法,在所述步骤s3中,还包括:
16、当所述力平衡需求值小于所述最大气流协助力值,获取所述救助飞行设备的任务状态和所述受助飞行设备的视觉图像;
17、根据所述救助飞行设备的任务状态和所述受助飞行设备的视觉图像,进行救助任务适配判断,当判断为适配时,控制所述救助飞行设备调整飞行状态,使所述救助飞行设备产生旋翼扰流,从而减小受助飞行设备飞行时的阻力,以对所述受助飞行设备进行间接救助;
18、所述救助任务适配判断过程为,根据所述救助飞行设备的任务状态确认所述救助飞行设备是否有优先级更高的飞行任务或救援任务需要执行,当所述救助飞行设备没有优先级更高的飞行任务或者救援任务时,根据所述视觉图像判断当前环境是否适合救助。
19、根据本发明第一方面的方法,所述救助飞行设备设有辅助旋翼,当判断为适配时,控制所述救助飞行设备运动至所述受助飞行设备的正下方,并开启所述救助飞行设备的辅助旋翼,产生所述旋翼扰流。
20、根据本发明第一方面的方法,在所述步骤s3中,包括:
21、获取所述受助飞行设备被捕获需要的被捕获需求力;
22、获取所述救助飞行设备能提供的最大捕获力;
23、当所述被捕获需求力小于或等于所述最大捕获力时,利用所述救助飞行设备进行直接救助。
24、根据本发明第一方面的方法,所述救助飞行设备设有捕获设备,当所述被捕获需求力小于或等于所述最大捕获力时,利用所述捕获设备捕获所述受助飞行设备。
25、根据本发明第一方面的方法,在所述步骤s3中,包括:
26、获取所述受助飞行设备被接触托举需要的被托举需求力;
27、获取所述救助飞行设备能提供的最大托举力;
28、当所述被托举需求力小于或等于所述最大托举力时,利用所述救助飞行设备进行直接救助。
29、根据本发明第一方面的方法,所述救助飞行设备设有辅助支撑平台,当所述被托举需求力小于或等于所述最大托举力时,利用所述辅助支撑平台支撑所述受助飞行设备。
30、本发明第二方面公开了一种飞行设备互助返航的系统;所述系统包括:
31、信息获取模块,被配置为,获取受助飞行设备的故障类型及第一动力状态信息,并获取救助飞行设备的第二动力状态信息;
32、动力状态确认模块,被配置为,根据所述第一动力状态信息确认所述受助飞行设备的动力损失状态;
33、判断模块,被配置为,根据所述受助飞行设备的故障类型、所述受助飞行设备的动力损失状态以及所述第二动力状态信息,进行救助可行性判断;
34、当所述受助飞行设备的故障类型为旋翼故障,且所述受助飞行设备的动力损失状态为一级损失状态时,根据所述第二动力状态信息和所述第一动力状态信息,进行间接救助的可行性判断,当所述间接救助的可行性判断结果为可行时,利用所述救助飞行设备对所述受助飞行设备进行间接救助;
35、当所述受助飞行设备的故障类型为机体故障,或者所述受助飞行设备的动力损失状态为二级损失状态,或者所述间接救助的可行性判断结果为不可行时,进行直接救助的可行性判断,当所述直接救助的可行性判断结果为可行时,利用所述救助飞行设备对所述受助飞行设备进行直接救助;
36、其中,所述二级损失状态的动力损失比所述一级损失状态的动力损失严重。
37、本发明第三方面公开了一种电子设备。电子设备包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时,实现本公开第一方面中任一项的一种飞行设备互助返航的方法中的步骤。
38、本发明第四方面公开了一种计算机可读存储介质。计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时,实现本公开第一方面中任一项的一种飞行设备互助返航的方法中的步骤。
39、综上,本发明提出的方案具备如下技术效果:利用获取的受助飞行设备的故障类型和第一动力状态信息以及救助飞行设备的第二动力状态信息进行间接互助和直接互助的选择,此种方式可以大大减小无人机的损失率,降低成本损耗;并大大减少无人机内关键信息损失以及被截取的概率。
技术特征:
1.一种飞行设备互助返航的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的飞行设备互助返航的方法,其特征在于,在所述步骤s3中,包括:
3.根据权利要求2所述的飞行设备互助返航的方法,其特征在于,当所述力平衡需求值大于所述最大气流协助力值,所述间接救助的可行性判断为不可行,之后进行所述直接救助的可行性判断。
4.根据权利要求2所述的飞行设备互助返航的方法,其特征在于,在所述步骤s3中,还包括:
5.根据权利要求4所述的飞行设备互助返航的方法,其特征在于,所述救助飞行设备设有辅助旋翼,当判断为适配时,控制所述救助飞行设备运动至所述受助飞行设备的正下方,并开启所述救助飞行设备的辅助旋翼,产生所述旋翼扰流。
6.根据权利要求1所述的飞行设备互助返航的方法,其特征在于,在所述步骤s3中,包括:
7.根据权利要求6所述的飞行设备互助返航的方法,其特征在于,所述救助飞行设备设有捕获设备,当所述被捕获需求力小于或等于所述最大捕获力时,利用所述捕获设备捕获所述受助飞行设备。
8.根据权利要求1所述的飞行设备互助返航的方法,其特征在于,在所述步骤s3中,包括:
9.根据权利要求8所述的飞行设备互助返航的方法,其特征在于,所述救助飞行设备设有辅助支撑平台,当所述被托举需求力小于或等于所述最大托举力时,利用所述辅助支撑平台支撑所述受助飞行设备。
10.一种飞行设备互助返航的系统,其特征在于,所述系统包括:
技术总结
本发明提出一种飞行设备互助返航的方法和系统。该方法包括:获取受助飞行设备的故障类型及第一动力状态信息,以确认受助飞行设备的动力状态;当受助飞行设备的故障类型为旋翼故障,且受助飞行设备的动力状态为一级损失状态时,获取救助飞行设备的第二动力状态信息;根据第二动力状态信息和第一动力状态信息,进行间接救助的可行性判断;当受助飞行设备的故障类型为机体故障,或者受助飞行设备的动力状态为二级损失状态,或者间接救助的可行性判断为不可行时,进行直接救助的可行性判断。本发明可以大大减小无人机的损失率,降低成本损耗;并大大减少无人机内关键信息损失以及被截取的概率。
技术研发人员:李成哲,买瑞敏,孙冉,赵兴文,曹庆华
受保护的技术使用者:中国兵器装备集团兵器装备研究所
技术研发日:
技术公布日:2024/1/15
-
 0133703... 来自[中国] 2023年09月13日 15:19资源很好,值得好好学习!
0133703... 来自[中国] 2023年09月13日 15:19资源很好,值得好好学习!