无人驾驶控制装置及无人驾驶车辆的制作方法
本公开涉及无人驾驶,更具体地,涉及一种无人驾驶控制装置及无人驾驶车辆。
背景技术:
1、无人驾驶技术是指利用人工智能、机器学习、传感器、地图等技术,使汽车等交通工具能够在没有人类驾驶的情况下自主完成行驶、避障、停车等操作,从而实现自动驾驶的一种技术。随着人工智能技术的飞速发展和智能交通的不断推进,无人驾驶技术已广泛应用于智能交通、智慧城市、物流等多个领域。
2、无人驾驶控制装置是无人驾驶车辆的核心组件。在相关技术中,由于无人驾驶车辆未能达到可以在任何道路和环境条件下自主行驶的安全等级,因此,无人驾驶控制装置通常需要与外部设备进行连接,以接收通过外部设备输入的行驶控制指令,这意味着无人驾驶控制装置需要向外提供数据接口,从而降低了无人驾驶控制装置的网络安全等级。
技术实现思路
1、有鉴于此,本公开提供了一种无人驾驶控制装置及无人驾驶车辆。
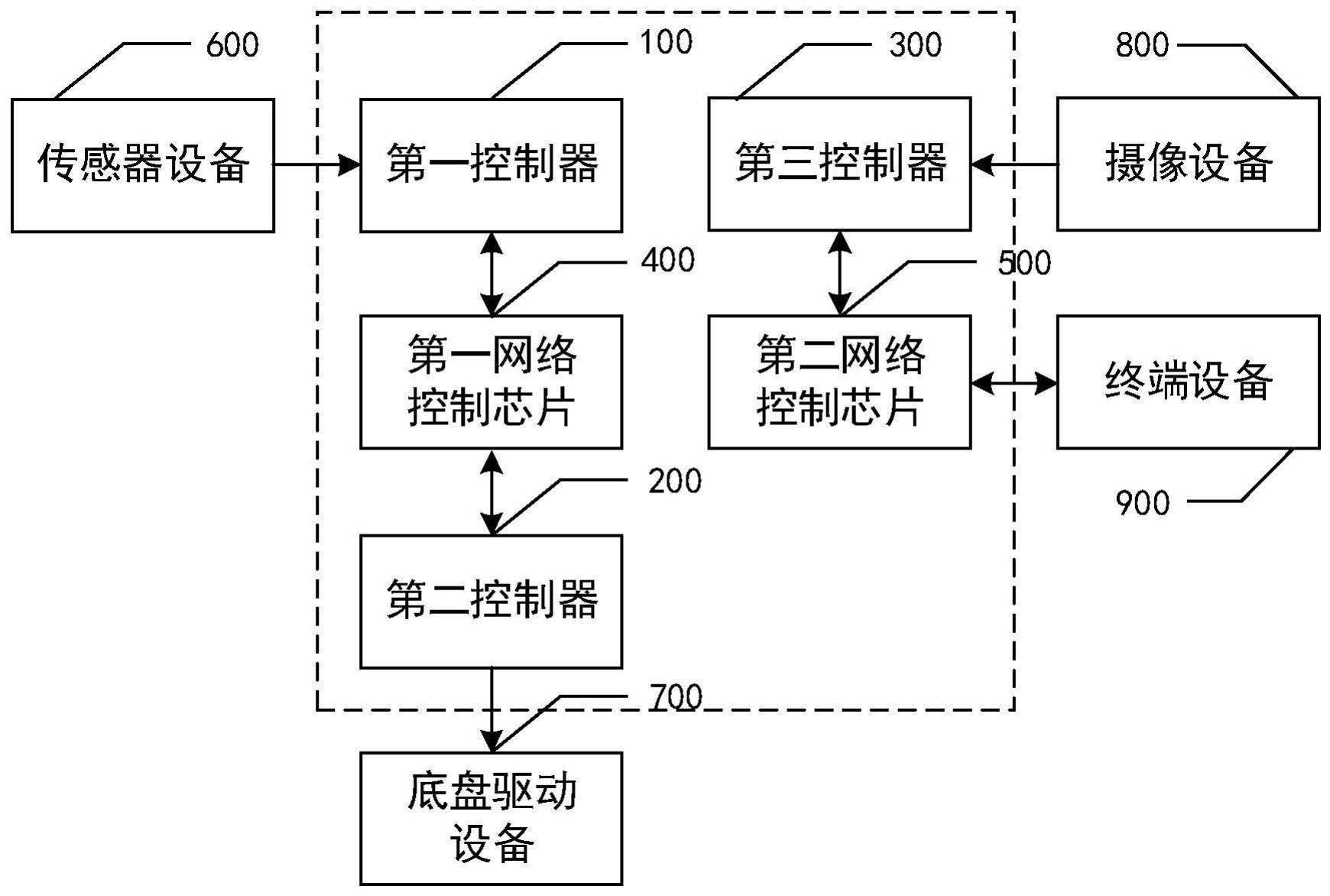
2、本公开的一个方面提供了一种无人驾驶控制装置,包括:第一控制器、第二控制器、第三控制器、第一网络控制芯片和第二网络控制芯片;其中,上述第一控制器被配置为连接传感器设备,上述第二控制器被配置为连接底盘驱动设备,上述第三控制器被配置为连接摄像设备,上述第一网络控制芯片被配置为分别连接上述第一控制器和上述第二控制器,上述第二网络控制芯片被配置为分别连接上述第三控制器和终端设备。
3、根据本公开的实施例,上述第一控制器被配置为接收上述传感器设备采集的第一传感数据,对上述第一传感数据进行预处理,得到第二传感数据,并向上述第一网络控制芯片发送上述第二传感数据;上述第一网络控制芯片被配置为向上述第二控制器转发上述第二传感数据;以及上述第二控制器被配置为利用感知模型处理上述第二传感数据,得到第一运动指令,并向上述底盘驱动设备发送上述第一运动指令,其中,上述底盘驱动设备被配置为运行上述第一运动指令,控制车辆的运动状态。
4、根据本公开的实施例,上述第三控制器被配置为接收上述摄像设备采集的视频流数据,并向上述第二网络控制芯片发送上述视频流数据;以及上述第二网络控制芯片被配置为向上述终端设备发送上述视频流数据。
5、根据本公开的实施例,上述第二网络控制芯片被配置为分别连接上述第一控制器和上述第二控制器;其中,上述第三控制器被配置为接收来自上述终端设备的控制指令,并向上述第二网络控制芯片发送上述控制指令,上述第二网络控制芯片被配置为分别向上述第一控制器和上述第二控制器转发上述控制指令。
6、根据本公开的实施例,上述控制指令包括传感器配置指令;其中,上述第一控制器被配置为响应于接收上述控制指令,向上述传感器设备发送上述控制指令包括的传感器配置指令,其中,上述传感器设备被配置为运行上述传感器配置指令,以配置上述传感器设备包括的多个传感器单元各自的工作状态。
7、根据本公开的实施例,上述控制指令包括第二运动指令;其中,上述第二控制器被配置为响应于接收上述控制指令,向上述底盘驱动设备发送上述控制指令包括的第二运动指令,其中,上述底盘驱动设备被配置为运行上述第二运动指令,控制上述车辆的运动状态。
8、根据本公开的实施例,上述传感器设备包括相机单元,上述无人驾驶控制装置还包括解串器;其中,上述第一控制器被配置为连接上述解串器,上述解串器被配置为通过多媒体串行链路连接上述相机单元。
9、根据本公开的实施例,上述第一网络控制芯片被配置为连接雷达设备;其中,上述第一网络控制芯片被配置为接收上述雷达设备采集的点云数据,并向上述第二控制器发送上述点云数据,上述第二控制器被配置为利用感知模型处理上述点云数据,得到第三运动指令,并向上述底盘驱动设备发送上述第三运动指令,其中,上述底盘驱动设备被配置为运行上述第三运动指令,控制上述车辆的运动状态。
10、根据本公开的实施例,上述装置还包括:微控制器;其中,上述微控制器被配置为分别连接上述第一控制器、上述第二控制器、上述第三控制器、上述第二网络控制芯片和电源设备;
11、其中,上述微控制器被配置为控制上述电源设备分别向上述第一控制器、上述第二控制器、上述第三控制器和上述第二网络控制芯片供电的上电时序和下电时序。
12、本公开的另一个方面提供了一种无人驾驶车辆,包括如上所述的无人驾驶控制装置。
13、根据本公开的实施例,通过为无人驾驶控制装置配置第一控制器、第二控制器、第三控制器、第一网络控制芯片和第二网络控制芯片,利用第一控制器、第二控制器和第一网络控制芯片组成自动驾驶控制网络,利用第三控制器和第二网络控制芯片组成业务控制网络,可以实现自动驾驶控制网络和业务控制网络的物理隔离,所以可以至少部分地克服相关技术中无人驾驶控制装置的网络安全等级较低的技术问题,从而可以有效提升无人驾驶网络的安全性。
技术特征:
1.一种无人驾驶控制装置,包括:
2.根据权利要求1所述的装置,其中,所述第一控制器被配置为接收所述传感器设备采集的第一传感数据,对所述第一传感数据进行预处理,得到第二传感数据,并向所述第一网络控制芯片发送所述第二传感数据;
3.根据权利要求1所述的装置,其中,所述第三控制器被配置为接收所述摄像设备采集的视频流数据,并向所述第二网络控制芯片发送所述视频流数据;以及
4.根据权利要求1所述的装置,其中,所述第二网络控制芯片被配置为分别连接所述第一控制器和所述第二控制器;
5.根据权利要求4所述的装置,其中,所述控制指令包括传感器配置指令;
6.根据权利要求4所述的装置,其中,所述控制指令包括第二运动指令;
7.根据权利要求1所述的装置,其中,所述传感器设备包括相机单元,所述无人驾驶控制装置还包括解串器;
8.根据权利要求1所述的装置,其中,所述第一网络控制芯片被配置为连接雷达设备;
9.根据权利要求1所述的装置,还包括:
10.一种无人驾驶车辆,包括如权利要求1~9中任一项所述的无人驾驶控制装置。
技术总结
本公开提供了一种无人驾驶控制装置及无人驾驶车辆,可以应用于无人驾驶技术领域。该无人驾驶控制装置包括:第一控制器、第二控制器、第三控制器、第一网络控制芯片和第二网络控制芯片;其中,第一控制器被配置为连接传感器设备,第二控制器被配置为连接底盘驱动设备,第三控制器被配置为连接摄像设备,第一网络控制芯片被配置为分别连接第一控制器和第二控制器,第二网络控制芯片被配置为分别连接第三控制器和终端设备。
技术研发人员:张占辉,赵字羽,郄新越,李志林,周林俏,许哲涛
受保护的技术使用者:北京京东乾石科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!