无人机集群行为控制方法、系统、电子设备和存储介质与流程
本发明属于无人机控制,具体涉及一种无人机集群行为控制方法、系统、电子设备和存储介质。
背景技术:
1、基于行为的控制方法是一类典型的集群控制方法,该方法由一系列单原子(不可再分)行为组成,每个行为具有各自的目标或者任务,控制行为则是在给每个行为赋予一个适当的权值后的总和,输入可以是无人机的传感器信息,也可以是系统中其他无人机行为的输出(1。系统可能的行为包括避碰、避障,目标搜索和集群保持,以及有效的行为协调机制或行为仲裁方案。通过对无人机基本行为以及局部控制规则的设计使得无人机集群产生所需的整体行为。包括避障、避碰和目标导航等,为了实现行为的决策,使用基于领航的队形,利用2个循环策略设计队形保持控制器。无人机集群任务是指需要由多架无人机共同完成的任务,该任务拥有足够的时间资源,允许多架无人机顺序工作或者拥有充足的空间资源容纳多架无人机同时配合工作。面对不同的任务,基于行为的控制都是关键环节。现有技术中由于无人机的承载能力和算力有限制约了执行不同任务的无人机行为控制上的灵活性。
技术实现思路
1、本发明针对现有技术中的不足,提供一种无人机集群行为控制方法、系统、电子设备和存储介质。
2、为实现上述目的,本发明采用以下技术方案:
3、一种无人机集群行为控制方法,包括:
4、根据无人机的系统动力学模型获得无人机群的动力情况;
5、量化无人机的算力;
6、分析当前无人机的动力情况和算力能否满足执行任务的需求;将能满足需求的无人机作为待编队无人机群;
7、控制待编队无人机群在执行任务过程中的行为。
8、为优化上述技术方案,采取的具体措施还包括:
9、进一步地,所述无人机的系统动力学模型具体为:
10、
11、式中,表示第i个无人机的位置的一阶导数,v表示速度,表示速度的一阶导数,ui表示对第i个无人机的控制输入。
12、进一步地,所述量化无人机的算力具体为:
13、分别计算无人机的逻辑运算能力、并行计算能力和神经网络加速能力;利用下式对无人机进行算力量化:
14、
15、式中,cbr为无人机的总算力;n为逻辑运算芯片的数量,αi表示第i个逻辑运算芯片的映射比例系数,f(ai)表示第i个逻辑运算芯片ai提供的逻辑运算能力的映射函数,q1(tops)表示逻辑运算的冗余算力,m为并行计算芯片的数量,βj表示第j个并行计算芯片的映射比例系数,f(bj)表示第j个并行计算芯片bj提供的并行计算能力的映射函数,q2(flops)表示并行计算的冗余算力,p为神经网络加速芯片的数量,γk表示第k个神经网络加速芯片的映射比例系数,f(ck)表示第k个神经网络加速芯片ck提供的神经网络加速能力的映射函数,q3(flops)表示神经网络加速的冗余算力。
16、进一步地,分析所述算力能否满足执行任务的需求具体为:
17、获取所有历史完成相同任务的无人机的算力值,并加权平均获得完成任务基线值;若被量化的无人机的算力大于或等于基线值,则认为当前无人机的算力满足执行任务的需求。
18、进一步地,所述控制待编队无人机群在执行任务过程中的行为具体为:
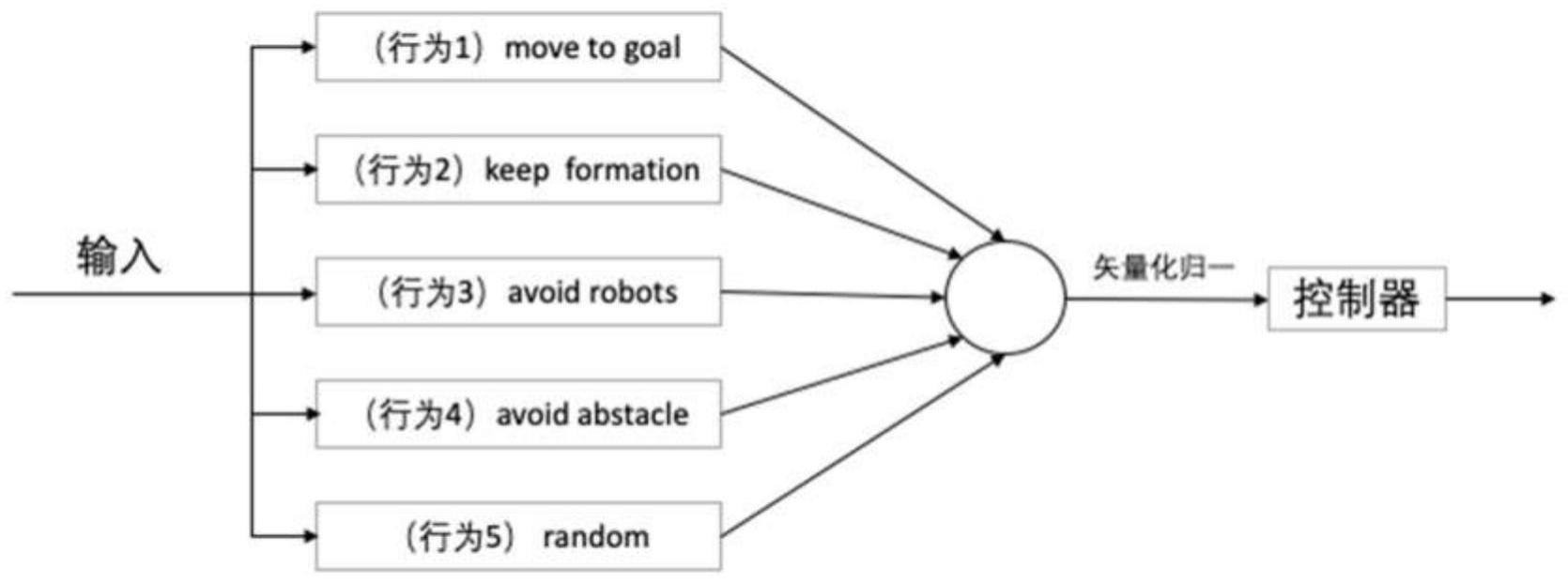
19、将无人机执行任务过程中的行为视为五种行为模式的加权和,所述五种行为模式具体为:驶向目标行为、队形保持行为、内部碰撞避免行为、障碍物回避行为和随机行为;
20、设计局部控制器,将所述五种行为模式输入局部控制器,根据需要执行的任务设计五种行为模式的加权因子,加权后合成控制无人机的控制信号。
21、进一步地,设计所述局部控制器的过程为:
22、根据无人机的系统动力学模型得到无人机在x方向和y方向的控制分量:
23、
24、式中,表示第i个无人机在x方向的位置分量的一阶导数,vix表示第i个无人机在x方向的速度分量,表示第i个无人机在x方向的速度的一阶导数,uix表示第i个无人机在x方向上的控制分量;表示第i个无人机在y方向的位置分量的一阶导数,viy表示第i个无人机在y方向的速度分量,表示第i个无人机在y方向的速度的一阶导数,uiy表示第i个无人机在y方向上的控制分量;
25、设计uix和uiy,如下:
26、
27、
28、式中,xix表示第i个无人机目前在x方向上的位置,xiy表示第i个无人机目前在y方向上的位置,和分别为第i个无人机在x方向上和y方向上的期望目标位置,xjx表示第j个无人机目前在x方向上的位置,xjy表示第j个无人机目前在y方向上的位置,和分别为第j个无人机在x方向上和y方向上的期望目标位置,αx,αy,βx,βy均为大于零的实数;aij为邻接矩阵中的元素;表示第i个无人机在x方向上期望目标位置的一阶导数,表示第i个无人机在y方向上期望目标位置的一阶导数。
29、本发明还提出一种无人机集群行为控制系统,包括:动力计算模块、算力量化模块、判断模块和控制模块;
30、所述动力计算模块根据无人机的系统动力学模型获得无人机群的动力情况;
31、所述算力量化模块量化无人机的算力;
32、所述判断模块分析当前无人机的动力情况和算力能否满足执行任务的需求;将能满足需求的无人机作为待编队无人机群;
33、所述控制模块利用局部控制器控制待编队无人机群在执行任务过程中的行为。
34、本发明还提出一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行计算机程序时,实现如上所述的无人机集群行为控制方法。
35、本发明还提出一种计算机可读存储介质,存储有计算机程序,所述计算机程序使计算机执行如上所述的无人机集群行为控制方法。
36、本发明的有益效果是:
37、创新性地构建异常情况下基于行为的无人机自动执行基础的控制,从而使整体性能不致恶化;同时,创新性地构建算力量化模型,利用无人机的系统动力学模型计算无人机群的动力满足执行任务的无人机数量。利用算力量化模型计算满足完成任务需求的算力资源的无人机,将这些满足需求的无人机一起放入待分配无人机编队。为执行分析任务提供健康的无人机。同时,执行任务过程中发生异常情况时,剩余算力和动力能够与执行的控制行为进行匹配,减少资源计算,实现智能地调度。本发明避免无人机到达驶向目标之间可能发生的队列异常,提高飞行行为算力量化的精确性。
技术特征:
1.一种无人机集群行为控制方法,其特征在于,包括:
2.如权利要求1所述的无人机集群行为控制方法,其特征在于,所述无人机的系统动力学模型具体为:
3.如权利要求1所述的无人机集群行为控制方法,其特征在于,所述量化无人机的算力具体为:
4.如权利要求1所述的无人机集群行为控制方法,其特征在于,分析所述算力能否满足执行任务的需求具体为:
5.如权利要求1所述的无人机集群行为控制方法,其特征在于,所述控制待编队无人机群在执行任务过程中的行为具体为:
6.如权利要求5所述的无人机集群行为控制方法,其特征在于,设计所述局部控制器的过程为:
7.一种无人机集群行为控制系统,其特征在于,包括:动力计算模块、算力量化模块、判断模块和控制模块;
8.一种电子设备,其特征在于,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行计算机程序时,实现如权利要求1-6任一项所述的无人机集群行为控制方法。
9.一种计算机可读存储介质,其特征在于:存储有计算机程序,所述计算机程序使计算机执行如权利要求1-6任一项所述的无人机集群行为控制方法。
技术总结
本发明针对现有无人机的承载能力和算力有限制约了执行不同任务的无人机行为控制上的灵活性,且承载能力不足容易造成无人机接收端对传感器数据错误或缺乏的情况,提出一种无人机集群行为控制方法、系统、电子设备和存储介质,属于无人机控制技术领域,方法包括:根据无人机的系统动力学模型获得无人机群的动力情况;量化无人机的算力;分析当前无人机的动力情况和算力能否满足执行任务的需求;将能满足需求的无人机作为待编队无人机群;控制待编队无人机群在执行任务过程中的行为。本发明避免无人机到达驶向目标之间可能发生的队列异常,提高飞行行为算力量化的精确性。
技术研发人员:王玉梁
受保护的技术使用者:中电信数智科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!