机器人的多方位充电方法、装置、介质及设备与流程
本发明涉及数据处理,尤其涉及机器人的多方位充电方法、装置、介质及设备。
背景技术:
1、对于携带深度相机的机器人,现有技术匹配了一个低电量阈值一个固定的充电位置。在机器人在室外运行时,若当前电量低于设定的低电量阈值,机器人可根据该预先下发的充电位置返航充电。
2、然而,深度相机受光照的影响较大,在充电位置可能会采集到错误的点云信息,也就是产生误识别,使得机器人认为充电位置有障碍物,从而无法到达充电位置充电,进而导致机器人异常关机。
技术实现思路
1、本发明实施例提供了一种机器人的多方位充电方法、装置、介质及设备,以解决现有机器人采用深度相机进行充电导航时产生的障碍物误识别、充电失败的问题。
2、一种机器人的多方位充电方法,所述方法包括:
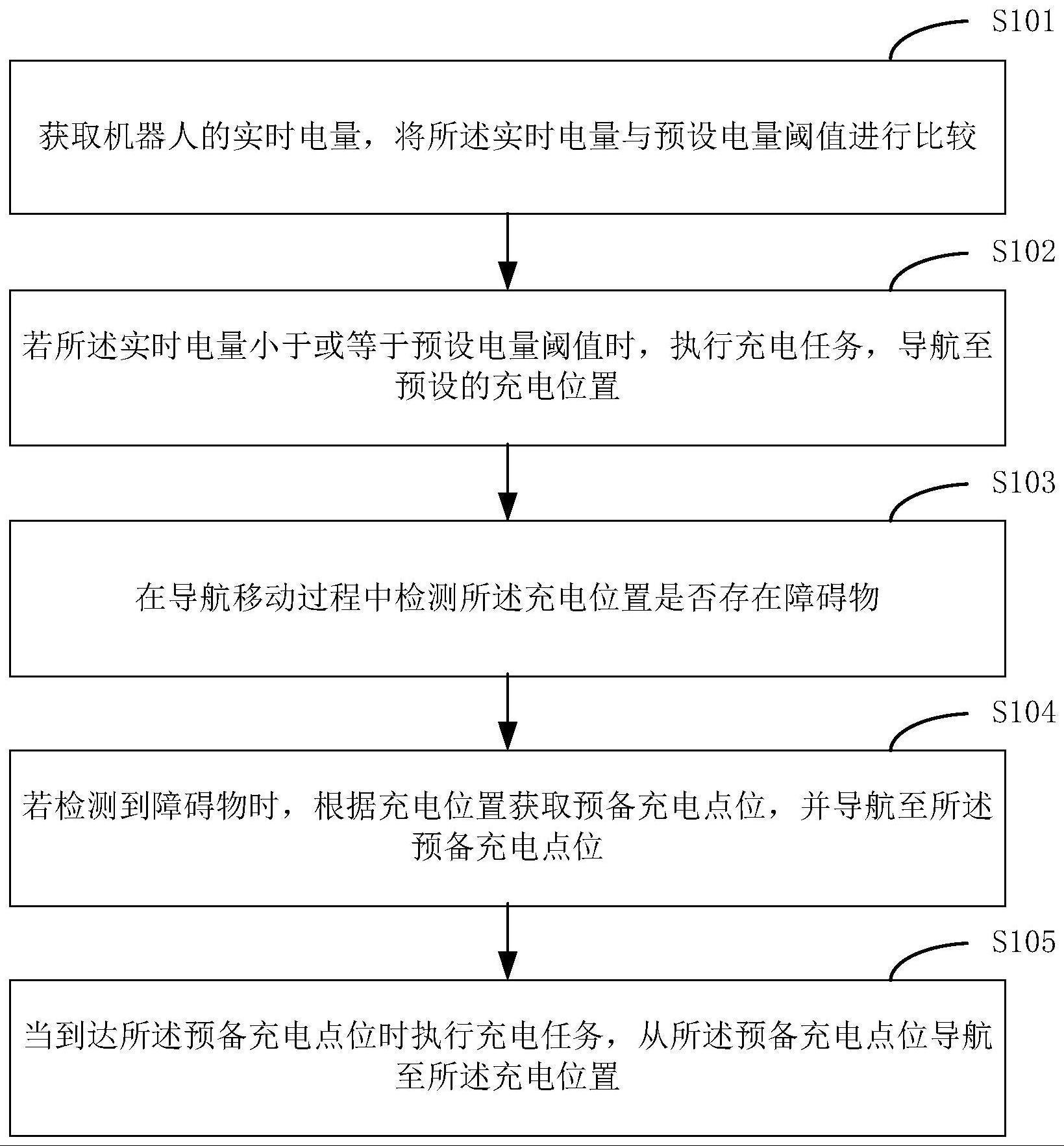
3、获取机器人的实时电量,将所述实时电量与预设电量阈值进行比较;
4、若所述实时电量小于或等于预设电量阈值时,执行充电任务,导航至预设的充电位置;
5、在导航移动过程中检测所述充电位置是否存在障碍物;
6、若检测到障碍物时,根据充电位置获取预备充电点位,并导航至所述预备充电点位;
7、当到达所述预备充电点位时执行充电任务,从所述预备充电点位导航至所述充电位置。
8、可选地,所述在导航移动过程中检测所述充电位置是否存在障碍物包括:
9、在导航移动过程中,获取所述充电位置预设距离范围内的激光点云数据;
10、将所述激光点云数据的个数与预设数量阈值进行比较;
11、若所述激光点云数据的个数大于或等于所述预设数量阈值时,所述充电位置存在障碍物。
12、可选地,所述根据充电位置获取预备充电点位包括:
13、获取所述充电位置的地图坐标信息,所述地图坐标信息包括充电位置在地图坐标系下的横坐标和纵坐标、方向信息,所述方向信息表示机器人的正面朝向充电桩的方向;
14、获取修正距离,根据所述横坐标和纵坐标、方向信息、修正距离分别计算所述预备充电点位的地图坐标信息。
15、可选地,所述预备充电点位的地图坐标信息(x_b、y_b、yaw_b)为:
16、x_b=x-d*cos(yaw+a)
17、y_b=y-d*sin(yaw+a)
18、yaw_b=yaw+a
19、其中,x_b表示预备充电点位的横坐标,y_b表示预备充电点位的纵坐标,yaw_b表示预备充电点位的方向信息,d表示修正距离,a表示预备充电点位相对于充电位置的偏移角,x表示充电位置的横坐标,y表示充电位置的纵坐标,yaw表示充电位置的方向信息。
20、可选地,所述预备充电点位包括正后方充电点位、左后方充电点位、右后方充电点位中的一个或者其任意组合。
21、可选地,所述预备充电点位包括正后方充电点位、左后方充电点位、右后方充电点位时,导航的优先顺序依次为正后方充电点位、左后方充电点位、右后方充电点位;
22、所述当到达所述预备充电点位时执行充电任务,从所述预备充电点位导航至所述充电位置包括:
23、当到达所述正后方充电点位时执行充电任务,从所述正后方充电点位导航至所述充电位置;
24、若导航失败,则再次导航至所述左后方充电点位;
25、当到达所述左后方充电点位时执行充电任务,从所述左后方充电点位导航至所述充电位置;
26、若导航失败,则再次导航至所述右后方充电点位;
27、当到达所述由后方充电点位时执行充电任务,从所述右后方充电点位导航至所述充电位置。
28、可选地,所述方法还包括:
29、若从所述预备充电点位无法到达所述充电位置,则生成并输出充电桩异常告警信息。
30、一种机器人的多方位充电方法,所述装置包括:
31、电量比较模块,用于获取机器人的实时电量,将所述实时电量与预设电量阈值进行比较;
32、导航模块,用于若所述实时电量小于或等于预设的电量阈值时,执行充电任务,导航至预设的充电位置;
33、障碍检测模块,用于在导航移动过程中检测所述充电位置是否存在障碍物;
34、易位模块,用于若检测到障碍物时,根据充电位置获取预备充电点位,并导航至所述预备充电点位;
35、多方位充电模块,用于当到达所述预备充电点位时执行充电任务,从所述预备充电点位导航至所述充电位置。
36、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的机器人的多方位充电方法。
37、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的机器人的多方位充电方法。
38、本发明实施例通过获取机器人的实时电量,将所述实时电量与预设电量阈值进行比较;若所述实时电量小于或等于预设的电量阈值时,执行充电任务,导航至预设的充电位置;在导航移动过程中检测所述充电位置是否存在障碍物;若检测到障碍物时,根据充电位置获取预备充电点位,并导航至所述预备充电点位;当到达所述预备充电点位时执行充电任务,从所述预备充电点位导航至所述充电位置。本实施例实现了从充电位置的不同方位尝试充电,避免了机器人因深度相机受到光照的影响产生障碍物误识别导致的充电失败、异常关机的问题。
技术特征:
1.一种机器人的多方位充电方法,其特征在于,包括:
2.如权利要求1所述的机器人的多方位充电方法,其特征在于,所述在导航移动过程中检测所述充电位置是否存在障碍物包括:
3.如权利要求1所述的机器人的多方位充电方法,其特征在于,所述根据充电位置获取预备充电点位包括:
4.如权利要求3所述的机器人的多方位充电方法,其特征在于,所述预备充电点位的地图坐标信息(x_b、y_b、yaw_b)为:
5.如权利要求4所述的机器人的多方位充电方法,其特征在于,所述预备充电点位包括正后方充电点位、左后方充电点位、右后方充电点位中的一个或者其任意组合。
6.如权利要求5所述的机器人的多方位充电方法,其特征在于,所述预备充电点位包括正后方充电点位、左后方充电点位、右后方充电点位时,导航的优先顺序依次为正后方充电点位、左后方充电点位、右后方充电点位;
7.如权利要求1至6任一项所述的机器人的多方位充电方法,其特征在于,所述方法还包括:
8.一种机器人的多方位充电装置,其特征在于,所述装置包括:
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的机器人的多方位充电方法。
10.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的机器人的多方位充电方法。
技术总结
本发明公开了一种机器人的多方位充电方法、装置、设备及介质,包括:获取机器人的实时电量,将所述实时电量与预设电量阈值进行比较;若所述实时电量小于或等于预设电量阈值时,执行充电任务,导航至预设的充电位置;在导航移动过程中检测所述充电位置是否存在障碍物;若检测到障碍物时,根据充电位置获取预备充电点位,并导航至所述预备充电点位;当到达所述预备充电点位时执行充电任务,从所述预备充电点位导航至所述充电位置。本发明有效地解决了现有机器人采用深度相机进行充电导航时产生的障碍物误识别、充电失败的问题。
技术研发人员:柏林,赖松锐,刘彪,舒海燕,袁添厦,祝涛剑,沈创芸,王恒华,方映峰
受保护的技术使用者:广州高新兴机器人有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!