一种用于电动垂直起降飞行器的飞行控制系统的制作方法
本发明涉及电动航空的,特别是涉及一种用于电动垂直起降飞行器的飞行控制系统。
背景技术:
1、随着人们对环境保护和城市交通状况的关注,飞行器的市场需求逐渐增加。然而,飞行器的飞行控制系统对于安全性和可靠性的要求非常高,尤其是在复杂的环境和天气条件下,需要保证飞行控制系统的稳定性和实时性。
2、在现有技术中,飞行器控制系统的发展已经取得了一定的进展,但仍然存在一些不足和缺陷,如能耗高、反应迟缓等,传统的飞行器控制系统通常基于pid控制器设计,虽然能够实现飞行器的基本稳定和控制,但存在以下问题:对于复杂的飞行情况,pid控制器的调节参数很难确定,导致系统控制性能较差;飞行中的扰动难以准确估计和补偿,导致控制系统的鲁棒性不足;控制系统的抗干扰能力和自适应能力较弱,无法满足复杂多变的环境需求;控制系统的可靠性和安全性不足,难以保证飞行器的安全飞行。
技术实现思路
1、本发明主要解决的技术问题是提供一种用于电动垂直起降飞行器的飞行控制系统,通过引入电池管理系统(bms)和飞行控制计算机(fcc)的协同管理策略和算法,实现飞行器的高效、精准的控制,提高了飞行器的飞行稳定性和安全性,以满足更加复杂多变的飞行环境需求。
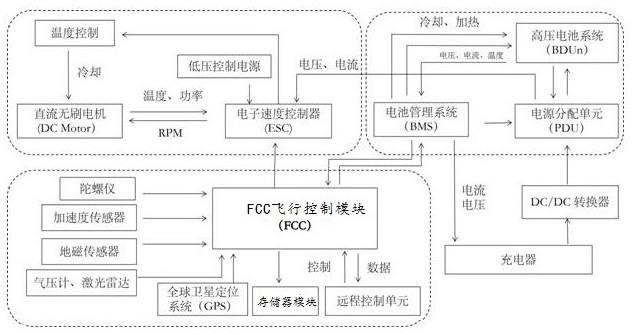
2、为解决上述技术问题,本发明采用的一个技术方案是:提供一种用于电动垂直起降飞行器的飞行控制系统,包括:fcc飞行控制模块和bms管理模块,所述fcc飞行控制模块包括飞行控制计算机和传感器模块,用于控制飞行器的飞行姿态和动力系统;所述bms管理模块用于监测飞行器的电池状态和能量消耗;所述飞行控制计算机通过接收传感器模块提供的飞行器的状态信息和bms采集的电池状态信息优化计算出飞行控制指令,并通过通信高速总线接口或以太网接口将指令传输至所述动力系统,以精准动态控制飞行器的安全飞行。
3、在本发明一个较佳实施例中,所述传感器模块包括惯性测量单元、gps接收机和气压计,所述惯性测量单元用于测量飞行器的姿态、角速度和线加速度信息,所述gps接收机用于测量飞行器的位置信息和速度信息,所述气压计用于测量大气压力,提供飞行器的高度和气压等状态信息。
4、在本发明一个较佳实施例中,所述传感器模块还包括陀螺仪、加速度计和磁力计,所述gps接收机用于接收卫星信号,提供飞行器的位置、速度和时间等状态信息。
5、在本发明一个较佳实施例中,所述惯性测量单元选用mems惯性测量单元或fog惯性测量单元,用于测量飞行器的姿态、角速度和加速度等状态信息。
6、在本发明一个较佳实施例中,所述动力系统包括电动机、电池组和直流电调器;所述电调器根据飞行控制计算机提供的控制指令,控制电动机的转速和功率,以控制飞行器的飞行。
7、在本发明一个较佳实施例中,所述飞行控制计算机还包括存储器模块,用于存储飞行器的状态信息和控制参数。
8、在本发明一个较佳实施例中,所述电池组可选用锂离子电池组或燃料电池组,所述锂离子电池组包括单体电池、串联电池或并联电池。
9、在本发明一个较佳实施例中,所述bms管理模块包括电池管理系统、高压电池系统和电源分配单元;所述电池管理系统用于监测电池的电量、温度、电压和电流状态信息,所述高压电池系统用于监测电池的电压信息,所述电源分配单元用于监测电池的充放电电流信息。
10、在本发明一个较佳实施例中,所述fcc飞行控制模块和bms管理模块之间通过管理控制策略相互协作,用于实现所述飞行器飞行器的稳定和精准控制,包括但不限于基于模型的预测控制mpc、自适应控制或滑模控制。
11、在本发明一个较佳实施例中,所述fcc飞行控制模块和bms管理模块之间的相互协作通过基于can总线或以太网通信协议的数据传输协议完成。
12、本发明的有益效果是: 通过将fcc和bms管理模块相互协作,实现飞行器的高效、精准的控制,提高了飞行器的飞行稳定性和安全性,以满足更加复杂多变的飞行环境需求,实现了电池状态和能量消耗的实时反馈和调整,从而提高了飞行器的稳定性和安全性。
技术特征:
1.一种用于电动垂直起降飞行器的飞行控制系统,其特征在于,包括:fcc飞行控制模块和bms管理模块,所述fcc飞行控制模块包括飞行控制计算机和传感器模块,用于控制飞行器的飞行姿态和动力系统;所述bms管理模块用于监测飞行器的电池状态和能量消耗;所述飞行控制计算机通过接收传感器模块提供的飞行器的状态信息和bms采集的电池状态信息优化计算出飞行控制指令,并通过通信高速总线接口或以太网接口将指令传输至所述动力系统,以精准动态控制飞行器的安全飞行。
2.根据权利要求1所述的用于电动垂直起降飞行器的飞行控制系统,其特征在于,所述传感器模块包括惯性测量单元、gps接收机和气压计,所述惯性测量单元用于测量飞行器的姿态、角速度和线加速度信息,所述gps接收机用于测量飞行器的位置信息和速度信息,所述气压计用于测量大气压力,提供飞行器的高度和气压等状态信息。
3.根据权利要求2所述的用于电动垂直起降飞行器的飞行控制系统,其特征在于,所述传感器模块还包括陀螺仪、加速度计和磁力计,所述gps接收机用于接收卫星信号,提供飞行器的位置、速度和时间等状态信息。
4.根据权利要求2所述的用于电动垂直起降飞行器的飞行控制系统,其特征在于,所述惯性测量单元选用mems惯性测量单元或fog惯性测量单元,用于测量飞行器的姿态、角速度和加速度等状态信息。
5.根据权利要求1所述的用于电动垂直起降飞行器的飞行控制系统,其特征在于,所述动力系统包括电动机、电池组和直流电调器;所述电调器根据飞行控制计算机提供的控制指令,控制电动机的转速和功率,以控制飞行器的飞行。
6.根据权利要求5所述的用于电动垂直起降飞行器的飞行控制系统,其特征在于,所述飞行控制计算机还包括存储器模块,用于存储飞行器的状态信息和控制参数。
7.根据权利要求5所述的用于电动垂直起降飞行器的飞行控制系统,其特征在于,所述电池组可选用锂离子电池组或燃料电池组,所述锂离子电池组包括单体电池、串联电池或并联电池。
8.根据权利要求1所述的用于电动垂直起降飞行器的飞行控制系统,其特征在于,所述bms管理模块包括电池管理系统、高压电池系统和电源分配单元;所述电池管理系统用于监测电池的电量、温度、电压和电流状态信息,所述高压电池系统用于监测电池的电压信息,所述电源分配单元用于监测电池的充放电电流信息。
9.根据权利要求1所述的用于电动垂直起降飞行器的飞行控制系统,其特征在于,所述fcc飞行控制模块和bms管理模块之间通过管理控制策略相互协作,用于实现所述飞行器飞行器的稳定和精准控制,包括但不限于基于模型的预测控制mpc、自适应控制或滑模控制。
10.根据权利要求9所述的用于电动垂直起降飞行器的飞行控制系统,其特征在于,所述fcc飞行控制模块和bms管理模块之间的相互协作通过基于can总线或以太网通信协议的数据传输协议完成。
技术总结
本发明公开了一种用于电动垂直起降飞行器的飞行控制系统,包括:FCC飞行控制模块和BMS管理模块,所述FCC飞行控制模块包括飞行控制计算机和传感器模块,用于控制飞行器的飞行姿态和动力系统;所述BMS管理模块用于监测飞行器的电池状态和能量消耗;所述飞行控制计算机通过接收传感器模块提供的飞行器的状态信息计算出飞行控制指令,并通过通信高速总线接口或以太网接口将指令传输至所述动力系统,以控制飞行器的飞行。本发明用于电动垂直起降飞行器的飞行控制系统,可以有效应对飞行器飞行器面临的技术挑战,为相关领域的技术研发和应用提供有益的指导和启示。
技术研发人员:苑克国,潘晓俊,李满坤
受保护的技术使用者:齐飞航空科技(苏州)有限责任公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!