一种用于机器人力矩控制的微分控制电路及控制方法与流程
本发明涉及力矩控制,尤其是一种用于机器人力矩控制的微分控制电路及控制方法。
背景技术:
1、机器人在完成一些与环境存在力发生作用的任务如打磨、装配工作时,采用单纯的位置控制会由于位置误差而引起过大的作用力,从而对零件或机器人产生伤害。为了避免这类伤害,当机器人在这类受限环境中运作时,除了对机器人进行位置控制外,还要对机器人进行力矩控制。
2、常规的机器人力矩控制主要通过pid控制器实现,将pid控制器的微分项置0,仅使用比例参数和积分参数两项进行控制,然而单纯的pi控制容易造成电流变化过快或过慢的问题,同时控制精度也不达预期,因此无法实现多个电机协同的力矩控制。
技术实现思路
1、有鉴于此,本发明实施例提供一种用于机器人力矩控制的微分控制电路及控制方法。
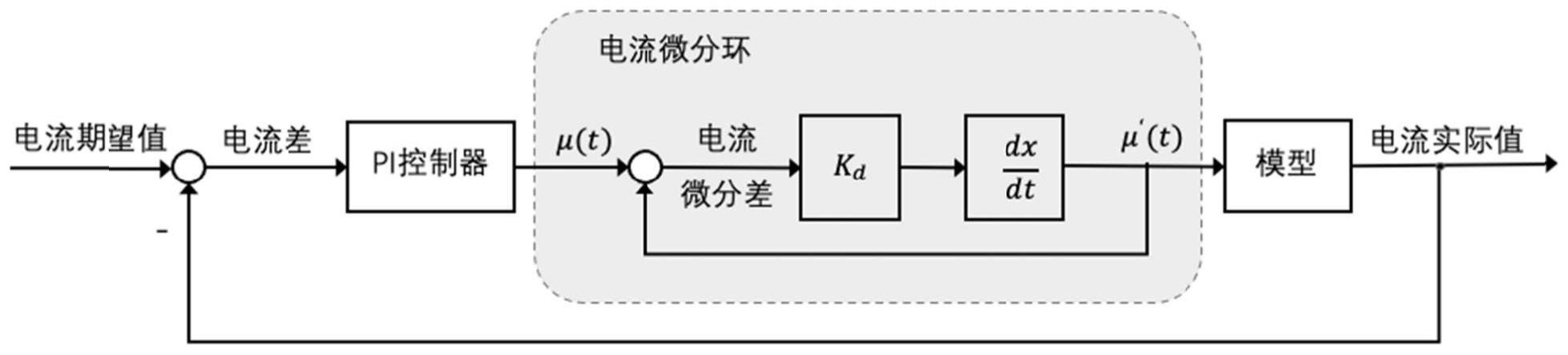
2、本发明的第一方面提供了一种用于机器人力矩控制的微分控制电路,其特征在于,包括pi控制器、电流微分环和受控电机;所述pi控制器、电流微分环和受控电机组成用于力矩控制的电流环;所述电流环以期望电流值为输入、实际电流值为输出;
3、所述pi控制器以所述期望电流值与上一时刻所述实际电流值的电流差为输入,对所述电流差进行比例积分控制后输出参考电流值;
4、所述电流微分环以所述参考电流值为输入,进行微分反馈后输出微分电流值;
5、所述受控电机以所述微分电流值为输入,驱动电机运转形成实际电流值并输出。
6、进一步地,所述电流微分环包括顺序连接的微分单元和微分器;所述微分单元以所述参考电流值和上一时刻微分电流值的电流微分差值为输入,添加微分偏置后输入微分器进行微分运算,得到微分电流值输出。
7、进一步地,所述期望电流值表示对机器人进行力矩控制最理想的电流值;所述实际电流值表示上一时刻电机实际输出的电流值;所述期望电流值与所述实际电流值的电流差以如下形式表示:
8、ei(t)=i0(t)-i(t)
9、其中i0(t)是期望电流值,i(t)是实际电流值;t表示时间。
10、进一步地,所述所述pi控制器以如下形式表示:
11、
12、其中kp是所述pi控制器的比例参数,ki是所述pi控制器的积分参数,kd是所述pi控制器的微分参数,t表示时间;
13、当取kd=0时,所述pi控制器对所述电流差进行比例积分控制后得到的参考电流值以如下形式表示:
14、
15、其中μ(t)表示参考电流值。
16、进一步地,所述参考电流值表示所述pi控制器所输出的电流补偿值,所述所述参考电流值和上一时刻微分电流值的电流微分差值以如下形式表示:
17、eu(t)=μ(t)-μ‘(t)
18、所述微分器进行微分运算得到的微分电流值输出以如下形式表示:
19、
20、其中μ'(t)表示微分电流值,k'd表示所述微分器的微分参数值。
21、进一步地,所述受控电机输出实际电流值后,将实际电流值与预设的转矩系数相乘,得到用于控制机器人的目标力矩:
22、f=kc×i(t)
23、其中,f是目标力矩,kc是电机转矩系数,i(t)是实际电流值。
24、本发明第二方面一种用于机器人力矩控制的微分控制方法,应用于所述的一种用于机器人力矩控制的微分控制电路,包括以下步骤:
25、设定力矩分配策略,根据所述力矩分配策略确定每个微分控制电路的期望电流值;
26、将所述期望电流值输入微分控制电路,得到实际电流值;
27、将所述实际电流值转化为力矩并作用于机器人上。
28、进一步地,所述将所述实际电流值转化为力矩并作用于机器人上,具体包括以下步骤:
29、将实际电流值与预设的转矩系数相乘,得到用于控制机器人的目标力矩:
30、f=kc×i(t)
31、其中,f是目标力矩,kc是电机转矩系数,i(t)是实际电流值;
32、使用所述目标力矩对机器人进行控制。
33、进一步地,所述力矩分配策略包括平均分配、线性分配和非线性分配;当所述力矩分配策略为平均分配时,每个所述微分控制电路的期望电流值设置为相同值;当所述力矩分配策略为线性分配时,所述微分控制电路的期望电流值呈线性递增关系;当所述力矩分配策略为非线性分配时,所述微分控制电路的期望电流值根据预设非线性关系函数确定。
34、本发明实施例还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行前面的方法。
35、本发明的实施例具有如下有益效果:本发明在pi控制器的电流环之下增加了电流微分环,通过电流微分环检测电流环的动态特性,防止电流变化过快过慢,提高系统稳定性的同时也确保了实际输出电流的精度。本发明兼容多个电机协同进行力矩控制,针对每个电机分别设置一个电流微分环,能够使得每个电机更好地完成力矩分配。
36、本发明的附加方面和优点将在下面的描述部分中给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种用于机器人力矩控制的微分控制电路,其特征在于,包括pi控制器、电流微分环和受控电机;所述pi控制器、电流微分环和受控电机组成用于力矩控制的电流环;所述电流环以期望电流值为输入、实际电流值为输出;
2.根据权利要求1所述的一种用于机器人力矩控制的微分控制电路,其特征在于,所述电流微分环包括顺序连接的微分单元和微分器;所述微分单元以所述参考电流值和上一时刻微分电流值的电流微分差值为输入,添加微分偏置后输入微分器进行微分运算,得到微分电流值输出。
3.根据权利要求2所述的一种用于机器人力矩控制的微分控制电路,其特征在于,所述期望电流值表示对机器人进行力矩控制最理想的电流值;所述实际电流值表示上一时刻电机实际输出的电流值;所述期望电流值与所述实际电流值的电流差以如下形式表示:
4.根据权利要求3所述的一种用于机器人力矩控制的微分控制电路,其特征在于,所述所述pi控制器以如下形式表示:
5.根据权利要求4所述的一种用于机器人力矩控制的微分控制电路,其特征在于,所述参考电流值表示所述pi控制器所输出的电流补偿值,所述所述参考电流值和上一时刻微分电流值的电流微分差值以如下形式表示:
6.根据权利要求1所述的一种用于机器人力矩控制的微分控制电路,其特征在于,所述受控电机输出实际电流值后,将实际电流值与预设的转矩系数相乘,得到用于控制机器人的目标力矩:
7.一种用于机器人力矩控制的微分控制方法,应用于至少一个如权利要求1-5任一项所述的一种用于机器人力矩控制的微分控制电路,其特征在于,包括以下步骤:
8.根据权利要求7所述的一种用于机器人力矩控制的微分控制方法,其特征在于,所述将所述实际电流值转化为力矩并作用于机器人上,具体包括以下步骤:
9.根据权利要求7所述的一种用于机器人力矩控制的微分控制方法,其特征在于,所述力矩分配策略包括平均分配、线性分配和非线性分配;当所述力矩分配策略为平均分配时,每个所述微分控制电路的期望电流值设置为相同值;当所述力矩分配策略为线性分配时,所述微分控制电路的期望电流值呈线性递增关系;当所述力矩分配策略为非线性分配时,所述微分控制电路的期望电流值根据预设非线性关系函数确定。
技术总结
本发明公开了一种用于机器人力矩控制的微分控制电路及控制方法。电路包括PI控制器、电流微分环和受控电机;PI控制器以期望电流值与实际电流值的电流差为输入,对电流差进行比例积分控制后输出参考电流值;电流微分环以参考电流值为输入,进行微分反馈后输出微分电流值;受控电机以微分电流值为输入,驱动电机运转形成实际电流值并输出。本发明在PI控制器的电流环之下增加了电流微分环,通过电流微分环检测电流环的动态特性,防止电流变化过快过慢,提高系统稳定性的同时也确保了实际输出电流的精度。本发明兼容多个电机协同进行力矩控制,针对每个电机分别设置一个电流微分环,能够使得每个电机更好地完成力矩分配。
技术研发人员:席宁,张家维,陈丽燕,王宇,张启毅
受保护的技术使用者:深圳市智能机器人研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!