满足指定性能的多船预设时间分段输出反馈编队控制方法
本发明涉及船舶自动控制,尤其涉及满足指定性能的多船预设时间分段输出反馈编队控制方法。
背景技术:
1、随着各国在经济与军事领域上对于海洋资源竞争的日益增强,船舶的控制技术得到了大力的发展。多水面船编队控制具有广阔的工程应用背景,例如在航补给、海底测绘以及护航编队、海上巡逻、编队扫雷等。
2、近年来,反演控制、模糊控制、滑模控制等一系列控制方法已经被应用到多船编队控制领域中,并且取得了许多不错的成果。然而,这些控制系统的收敛时间往往被系统初始条件和控制器的设计参数所限制,导致工程师不能够提前设定收敛时间,降低了系统的工作效率,不利于控制器在实际中的应用。
技术实现思路
1、本发明提供了满足指定性能的多船预设时间分段输出反馈编队控制方法,以克服控制系统的收敛时间受系统初始条件和控制器的设计参数限制,导致工程师不能够提前设定收敛时间,降低了系统的工作效率技术问题。
2、为了实现上述目的,本发明的技术方案是:包括如下步骤:
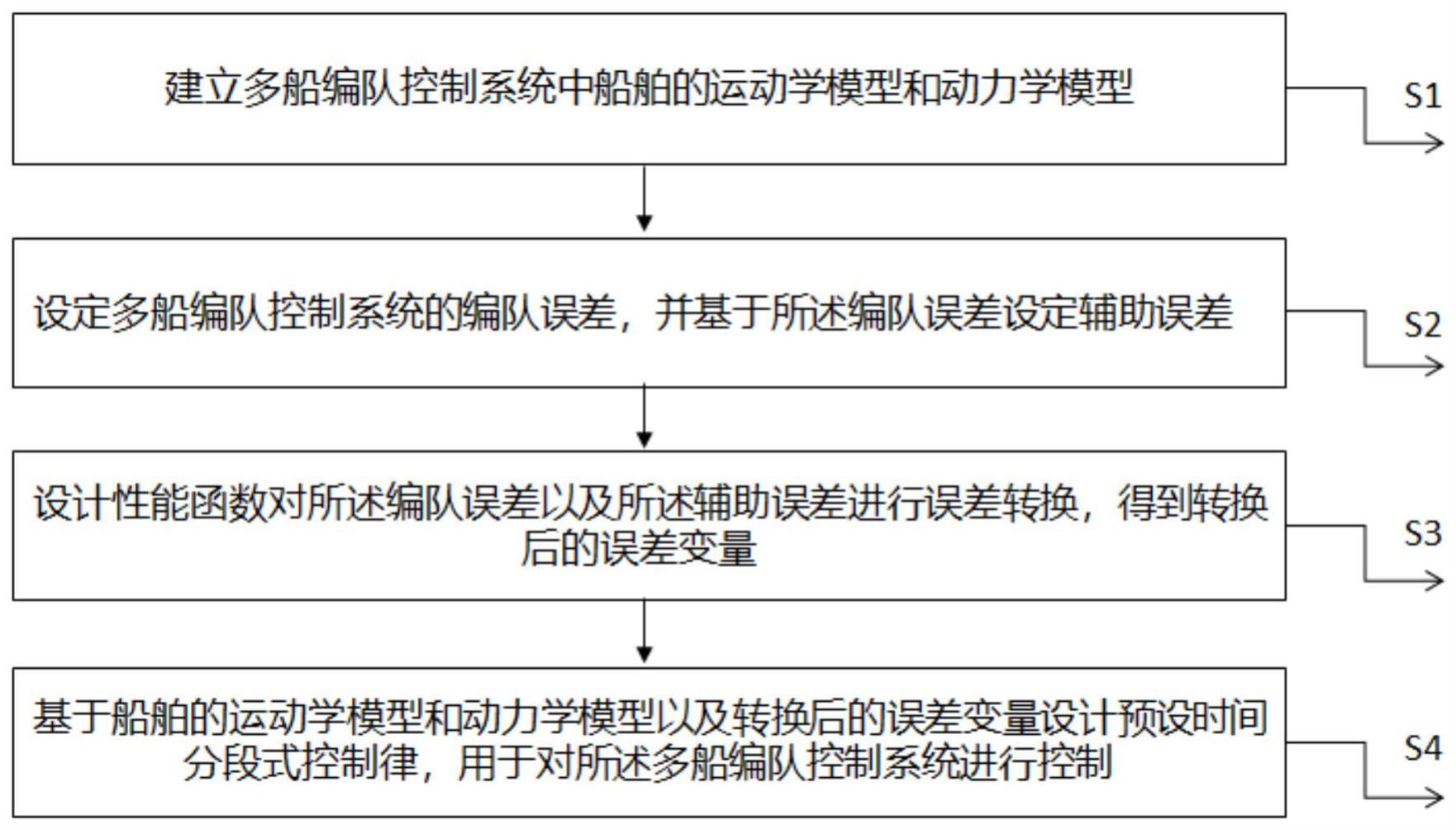
3、s1:建立多船编队控制系统中船舶的运动学模型和动力学模型;
4、s2:设定多船编队控制系统的编队误差,并基于所述编队误差设定辅助误差;
5、s3:设计性能函数对所述编队误差以及所述辅助误差进行误差转换,得到转换后的误差变量;
6、s4:基于船舶的运动学模型和动力学模型以及转换后的误差变量设计预设时间分段式控制律,用于对所述多船编队控制系统进行控制。
7、具体地,s3中,
8、s31:设计的性能函数表示为:
9、
10、式中,是性能函数ρ的一阶导数;ρt是性能函数ρ的稳态值;是单调递增的光滑函数;t是时间变量;t是预设收敛时间;
11、s32:基于设计性能函数对所述编队误差以及所述辅助误差进行误差转换后得到的误差变量表示为:
12、
13、
14、式中,是辅助误差;e1i是编队误差;δ1,δ2是正常数;s1i,s2i是中间辅助变量;ε1i,ε2i是误差转换后的误差变量;e是指数函数的底,为自然常数,是单调递增的光滑函数;
15、通过上述误差转换,使船舶编队误差满足如下指定性能:
16、
17、具体地,s2中,
18、s21:设定的多船编队控制系统的编队误差表示为:
19、
20、式中,aij是第i艘船与第j艘船连接的权值;ni是第i艘船邻居的集合;ψi,ψj分别是第i艘船与第j艘船的艏向角;r(·)是将船体坐标系转换到大地坐标系的转换矩阵;li,lj分别是第i艘船与第j艘船的队形结构向量;bi是指领航者与船舶通信连接的权值;ηi是第i艘船在北东坐标系下的位置变量;ηd是船舶期望航迹;
21、s22:基于所述编队误差e1i设定的辅助误差表示为:
22、
23、
24、式中,是辅助误差;是单调递增的光滑函数;t是时间变量;t是预设收敛时间。
25、具体地,s4中,基于船舶的运动学模型和动力学模型以及转换后的误差变量设计预设时间分段式控制律的步骤包括:
26、s41:基于转换后的误差变量设计的分段式虚拟控制律αi表示为:
27、
28、其中:
29、σ2i=(1/(2e1i+2δ1ρ)-1/(2e1i-2δ2ρ));
30、dbi=dii+bi;
31、式中,k1,k2分别是ε1i,ε2i的控制增益项;δ1,δ2是正常数;dii为度矩阵的元素;bi是指领航者与船舶通信连接的权值;aij是第i艘船与第j艘船连接的权值;μj是第j艘船在北东坐标系下的速度向量;是ni是第i艘船邻居的集合;ψi,ψj分别是第i艘船与第j艘船的艏向角;r(·)是将船体坐标系转换到大地坐标系的转换矩阵;是r(ψi)的一阶导数,是r(ψj)的一阶导数;li,lj分别是第i艘船与第j艘船的队形结构向量;是性能函数ρ的一阶导数;是辅助误差;e1i是编队误差;是单调递增的光滑函数;的船舶期望航迹ηd的一阶导数;
32、s42:基于分段式虚拟控制律αi设定第i艘船的速度跟踪误差e2i表示为:
33、e2i=μi-αi
34、式中,μi是第i艘船在北东坐标系下的速度向量;
35、s43:基于第i艘船的速度跟踪误差e2i设计分段式控制律τi表示为:
36、
37、式中,k3,k4是e2i的控制增益项;rt(·)是转换矩阵r(·)的转置矩阵;mi是第i艘船的惯性矩阵;wi是多船编队控制系统中的总扰动;是虚拟控制律αi的一阶导数。
38、具体地,s1中,船舶的运动学模型表示为:
39、
40、船舶的动力学模型表示为:
41、
42、其中wi是多船编队控制系统中的总扰动,表示为:
43、
44、式中,i=1,2...n是指用于编队的船舶数量;ηi是第i艘船在北东坐标系下的位置变量,ηi=[xi,yi,ψi]t;是ηi的一阶导数;μi是第i艘船在北东坐标系下的速度向量,μi=r(ψi)[ui,vi,ri]t,ui,vi,ri分别是前向速度,横向速度和转艏角速度,是μi的一阶导数;τi是第i艘船的控制输入向量,τi=[τui τvi τri]t;τωi=[τuωi τvωi τrωi]t表示由海洋环境风、浪、流引起的外界干扰力;mi是第i艘船的惯性矩阵;ψi,ψj分别是第i艘船与第j艘船的艏向角;r(·)是将船体坐标系转换到大地坐标系的转换矩阵;gi(·)是未建模动态;s(·)是r(·)对时间的求导矩阵;c(·)是科氏力矩阵;d(·)是阻尼矩阵。
45、有益效果:本发明设计了一种新型的具有预设时间收敛性的性能函数,并通过误差转换设计了满足指定性能的多船预设时间分段输出反馈编队控制器,由于性能函数和控制器具有预设时间收敛性,工程师可以根据实际任务需求提前设定收敛时间,而不受系统初始条件和控制器的设计参数的影响,提高了系统的工作效率,还可以确保多水面船在预设的时间以期望的队形跟踪期望航迹,且系统的瞬态和稳态性能在指定的安全范围内,提高了多水面船编队时的快速性和安全性。
技术特征:
1.满足指定性能的多船预设时间分段输出反馈编队控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的满足指定性能的多船预设时间分段输出反馈编队控制方法,其特征在于,s3中,
3.根据权利要求2所述的满足指定性能的多船预设时间分段输出反馈编队控制方法,其特征在于,s2中,
4.根据权利要求3所述的满足指定性能的多船预设时间分段输出反馈编队控制方法,其特征在于,s4中,基于船舶的运动学模型和动力学模型以及转换后的误差变量设计预设时间分段式控制律的步骤包括:
5.根据权利要求2所述的满足指定性能的多船预设时间分段输出反馈编队控制方法,其特征在于,s1中,船舶的运动学模型表示为:
技术总结
本发明公开了满足指定性能的多船预设时间分段输出反馈编队控制方法,包括如下步骤:S1:建立多船编队控制系统中船舶的运动学模型和动力学模型;S2:设定多船编队控制系统的编队误差,并基于所述编队误差设定辅助误差;S3:设计性能函数进行误差转换,得到转换后的误差变量;S4:基于船舶的运动学模型和动力学模型以及转换后的误差变量设计预设时间分段式控制律,用于对所述多船编队控制系统进行控制。通过设计一种具有预设时间收敛性的性能函数,并通过误差转换设计了满足指定性能的多船预设时间分段输出反馈编队控制器,使得工程师可以根据实际任务需求提前设定收敛时间,而不受系统初始条件和控制器的设计参数的影响,提高了工作效率。
技术研发人员:庹玉龙,戴东辰,王莎莎,彭周华,耿少龙,刘彪
受保护的技术使用者:大连海事大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!