行驶控制方法、行驶控制系统以及行驶控制程序与流程
本发明涉及使作业车辆在田地等中按照目标路径自动行驶的行驶控制方法、行驶控制系统以及行驶控制程序。
背景技术:
1、以往,作为能够自动行驶的作业车辆,公知有如下作业车辆:仅在直行时按照目标路径进行自动行驶,在转弯时根据由操作人员进行的手动转向操纵(手动操作)进行行驶(手动行驶)。另外,公知在已接近自动行驶的直行路径的结束点的情况下为了提醒操作人员从自动行驶向手动行驶的切换操作而输出蜂鸣音的技术(例如参照专利文献1)。
2、专利文献1:日本特开2015-112071号公报
3、然而,在一边切换自动行驶和手动行驶一边进行作业的作业车辆中,操作人员在从自动行驶向手动行驶切换时,需要使车辆暂时停止或使作业机的动作停止。在现有技术中,从自动行驶向手动行驶切换时操作人员不得不进行规定操作,所以产生花费工夫或未注意到上述蜂鸣音而忘记进行规定操作的问题。
技术实现思路
1、本发明的目的在于提供一种能够提升一边切换自动行驶和手动行驶一边进行作业的作业车辆中的操作人员的操作性的行驶控制方法、行驶控制系统以及行驶控制程序。
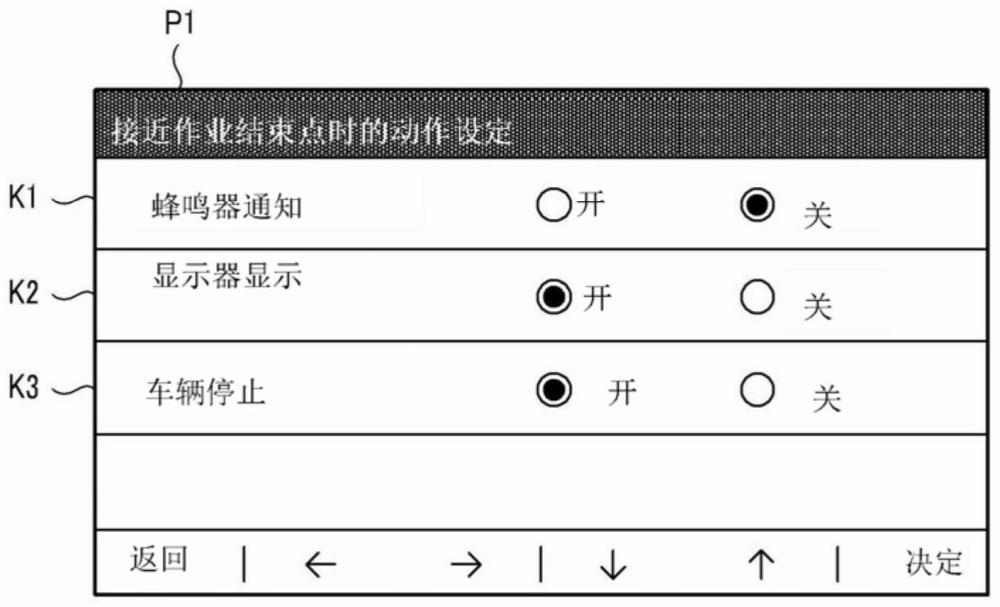
2、本发明所涉及的行驶控制方法执行:从使用者接受对多个动作项目的每一个进行设定的操作,上述多个动作项目与在作业车辆已到达用于使上述作业车辆自动行驶的作业路径的结束点所对应的规定位置的情况下使上述作业车辆执行的动作有关;和基于上述使用者的操作来设定上述多个动作项目的每一个。
3、本发明所涉及的行驶控制系统具备接受处理部和设定处理部。上述接受处理部从使用者接受对多个动作项目的每一个进行设定的操作,上述多个动作项目与在作业车辆已到达用于使上述作业车辆自动行驶的作业路径的结束点所对应的规定位置的情况下使上述作业车辆执行的动作有关。上述设定处理部基于上述使用者的操作来设定上述多个动作项目的每一个。
4、本发明所涉及的行驶控制程序是用于使一个或多个处理器执行以下处理的行驶控制程序,即:从使用者接受对多个动作项目的每一个进行设定的操作,上述多个动作项目与在作业车辆已到达用于使上述作业车辆自动行驶的作业路径的结束点所对应的规定位置的情况下使上述作业车辆执行的动作有关;和基于上述使用者的操作来设定上述多个动作项目的每一个。
5、根据本发明,能够提供一种能够提升一边切换自动行驶和手动行驶一边进行作业的作业车辆中的操作人员的操作性的行驶控制方法、行驶控制系统以及行驶控制程序。
技术特征:
1.一种行驶控制方法,其特征在于,执行:
2.根据权利要求1所述的行驶控制方法,其特征在于,
3.根据权利要求1所述的行驶控制方法,其特征在于,
4.根据权利要求3所述的行驶控制方法,其特征在于,
5.根据权利要求3所述的行驶控制方法,其特征在于,
6.根据权利要求3所述的行驶控制方法,其特征在于,
7.根据权利要求3所述的行驶控制方法,其特征在于,
8.根据权利要求7所述的行驶控制方法,其特征在于,
9.根据权利要求8所述的行驶控制方法,其特征在于,
10.根据权利要求3~9中的任一项所述的行驶控制方法,其特征在于,
11.根据权利要求10所述的行驶控制方法,其特征在于,
12.一种行驶控制系统,其特征在于,具备:
13.一种行驶控制程序,其特征在于,
技术总结
本发明提供一种能够提升一边切换自动行驶和手动行驶一边进行作业的作业车辆中的操作人员的操作性的行驶控制方法、行驶控制系统以及行驶控制程序。接受处理部(712)从使用者接受对多个动作项目的每一个进行设定的操作,上述多个动作项目与在作业车辆(10)已到达用于使作业车辆(10)自动行驶的作业路径的结束点所对应的规定位置的情况下使作业车辆(10)执行的动作有关。设定处理部(714)基于上述使用者的操作来设定上述多个动作项目的每一个。
技术研发人员:宫本真之助
受保护的技术使用者:洋马控股株式会社
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!