自移动设备移动控制方法、系统及计算机可读存储介质与流程
本发明涉及自移动设备路径规划,尤其涉及一种自移动设备移动控制方法、系统及计算机可读存储介质。
背景技术:
1、由于惯性定位系统存在不可忽略的累计误差,所以使用惯性定位系统的自移动设备,如割草机器人在运行过程中,随着时间的增长定位坐标的漂移会越来越大。为了防止定位漂移过大影响自移动设备的正常工作,需要在一定条件触发后进行重定位。
2、现有技术中,自移动设备的重定位技术存在定位效率低、路径非最优等问题。并且,重定位目标点的选择比较随机,没有一定的评价策略来选取最优目标点。由于自移动设备整个工作过程中重定位的次数会比较多,所以如何简单高效的完成重定位直接影响了机器人的工作效率。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种自移动设备移动控制方法和系统,使得自移动设备可以快速到达重定位目标点,从而减少重定位所需时间,提高自移动设备的工作效率。
2、为解决上述技术问题,本发明提供如下技术方案:
3、一方面,提供了一种自移动设备移动控制方法,包括以下步骤:
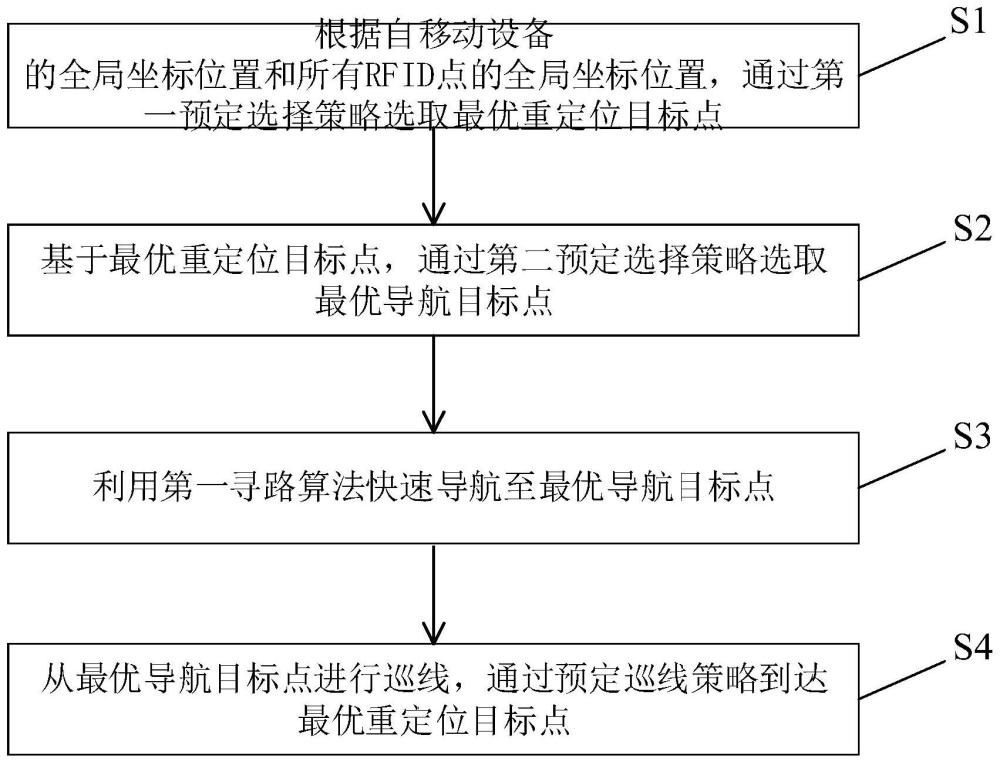
4、s1、根据自移动设备的全局坐标位置和所有rfid点的全局坐标位置,通过第一预定选择策略选取最优重定位目标点;
5、s2、基于所述最优重定位目标点,通过第二预定选择策略选取最优导航目标点;
6、s3、利用第一寻路算法快速导航至所述最优导航目标点;
7、s4、从所述最优导航目标点进行巡线,通过预定巡线策略到达所述最优重定位目标点。
8、优选地,在所述步骤s1中,所述第一预定选择策略具体包括:
9、s11、计算自移动设备的全局坐标位置与建图时记录的所有rfid点全局坐标位置之间的欧氏距离:
10、
11、其中,x机器人和y机器人表示自移动设备的全局坐标,xrfid和yrfid表示rfid点的全局坐标;
12、s12、通过代价地图计算自移动设备与每个rfid点连线之间穿过边界线或者障碍物的次数;每穿过一次边界线,对该rfid点对应的欧式距离乘以m倍作为更新后的欧式距离,m选择1-2之间的数值;每穿过一次障碍物,对该rfid点对应的欧式距离乘以n倍作为更新后的欧式距离,n选择1-2之间的数值,并且n<m;
13、假设某个rfid点与自移动设备连线穿过了p条边界线和q个障碍物,那么该rfid点的加权欧式距离计算如下:
14、
15、s13、对所有加权完成后的欧式距离进行排序,找到最小距离对应的rfid点,就是本次重定位的最优重定位目标点。
16、优选地,m的典型值为1.4,n的典型值为1.2。
17、优选地,在所述步骤s2中,所述第二预定选择策略具体包括:
18、s21、以最优重定位目标点为坐标原点,以该rfid点的航向角为x轴正方向,建立一个局部坐标系;
19、s22、在所述局部坐标系的第二象限选择一个点(a,b),其中a<0且b>0;
20、s23、将局部坐标(a,b)转换到全局坐标系下,得到最优导航目标点的位置信息,计算方式如下:
21、x导航=a*cos(θrfid)-b*sin(θrfid)+xrfid
22、y导航=b*cos(θrfid)+a*sin(θrfid)+yrfid
23、其中,x导航和y导航表示最优导航目标点的全局坐标,xrfid和yrfid表示该rfid点的全局坐标,θrfid示该rfid点的航向角;
24、s24、选择s21中局部坐标系y轴负方向作为最优导航目标点的航向角,结合s23中的坐标位置信息,得到完全的最优导航目标点;最优导航目标点的航向角计算如下:
25、
26、优选地,a的典型值为-2.0,b的典型值为0.5。
27、优选地,在所述步骤s3中,分别将自移动设备的全局坐标和最优导航目标点的全局坐标转换到栅格坐标,将这两个栅格坐标分别作为改进jps寻路算法的起点和终点;
28、改进jps寻路算法具体包括:
29、s31、通过代价地图计算寻路起点和终点之间是否有障碍物或者边界线;
30、s32、如果判断得到两个点之间没有障碍物或者边界线,那么该算法从起点开始搜索第一个点的方向就指定为终点方向;
31、如果判断得到两个点之间有障碍物或者边界线,那么该算法从起点开始搜索第一个点的方向需要遍历0,π,八个方向。
32、优选地,在所述步骤s4中,所述预定巡线策略具体包括:
33、s41、自移动设备沿着最优导航目标点航向角向前行走,下发速度大于0,角速度恒等于0,直到左右两个边界传感器都检测到出边界后停止;
34、s42、自移动设备向左自旋到左侧边界传感器的检测边界内;
35、s43、根据两个边界传感器信号相对强弱,计算左右偏差,控制自移动设备始终居中进行巡线;
36、s44、rfid传感器检测到最优重定位目标点的rfid点,自移动设备开始进行重定位。
37、另一方面,提供了一种自移动设备重定位目标点选择及快速到达系统,包括:
38、第一选择模块,用于根据自移动设备的全局坐标位置和所有rfid点的全局坐标位置,通过第一预定选择策略选取最优重定位目标点;
39、第二选择模块,用于基于所述最优重定位目标点,通过第二预定选择策略选取最优导航目标点;
40、导航模块,用于利用第一寻路算法快速导航至所述最优导航目标点;
41、巡线模块,用于从所述最优导航目标点进行巡线,通过预定巡线策略到达所述最优重定位目标点。
42、另一方面,提供了一种移动控制系统,所述移动控制系统包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现上述自移动设备重定位目标点选择及快速到达方法。
43、另一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述自移动设备重定位目标点选择及快速到达方法。
44、与现有技术相比,本发明提供的技术方案具有以下有益效果:
45、本发明提供的自移动设备重定位目标点选择及快速到达方法及系统,在自移动设备需要进行重定位时,根据自移动设备所在的全局坐标位置和所有rfid点的全局坐标位置,结合边界线和障碍物的坐标信息,加权计算距离自移动设备最近的rfid点,确定为最优的重定位目标点;基于最优重定位目标点建立局部坐标系,计算最优导航目标点;基于最优导航目标点,利用改进jps寻路算法快速导航至最优导航目标点;从最优导航目标点巡线到达最优重定位目标点。本发明能够减少自移动设备重定位所需时间,使得自移动设备可以快速到达重定位目标点,提高自移动设备工作效率。
技术特征:
1.一种自移动设备移动控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的自移动设备移动控制方法,其特征在于,在所述步骤s1中,所述第一预定选择策略具体包括:
3.根据权利要求2所述的自移动设备移动控制方法,其特征在于,所述根据边界线及障碍物信息对所述欧式距离进行加权包括:当rfid点与自移动设备连线穿过了p条边界线和q个障碍物,那么该rfid点的加权欧式距离计算如下:
4.根据权利要求1所述的自移动设备移动控制方法,其特征在于,在所述步骤s2中,所述第二预定选择策略具体包括:
5.根据权利要求4所述的自移动设备移动控制方法,其特征在于,a的典型值为-2.0,b的典型值为0.5。
6.根据权利要求1所述的自移动设备移动控制方法,其特征在于,在所述步骤s3中,分别将自移动设备的全局坐标和最优导航目标点的全局坐标转换到栅格坐标,将这两个栅格坐标分别作为第一寻路算法的起点和终点。
7.根据权利要求1所述的自移动设备移动控制方法,其特征在于,在所述步骤s4中,所述预定巡线策略具体包括:
8.一种自移动设备移动控制系统,其特征在于,包括:
9.一种移动控制系统,其特征在于,所述移动控制系统包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现如权利要求1-7任一项所述的自移动设备移动控制方法。
10.一种计算机可读存储介质,其特征在于,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现如权利要求1-7中任一项所述的自移动设备移动控制方法。
技术总结
本发明提供一种自移动设备移动控制方法、系统及计算机可读存储介质,属于自移动设备路径规划技术领域。所述方法包括:根据自移动设备的全局坐标位置和所有RFID点的全局坐标位置,通过第一预定选择策略选取最优重定位目标点;基于所述最优重定位目标点,通过第二预定选择策略选取最优导航目标点;利用第一寻路算法快速导航至所述最优导航目标点;从所述最优导航目标点进行巡线,通过预定巡线策略到达所述最优重定位目标点。本发明能够减少自移动设备重定位所需时间,使得自移动设备可以快速到达重定位目标点,提高自移动设备工作效率。
技术研发人员:王彬
受保护的技术使用者:江苏东成机电工具有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!