无人驾驶车辆的可靠性验证系统及方法与流程
本发明涉及无人驾驶,尤其涉及一种无人驾驶车辆的可靠性验证系统及方法。
背景技术:
1、随着无人驾驶技术的发展,无人驾驶开始应用于各大领域,其中矿区的交通场景相对简单,也更加有利于无人车的商业化落地。但是矿区地形复杂多变,安全性要求较高,且重视作业效率,所以基于对无人车运营过程中的安全保障能力和场景快速构建的考虑,对无人车的无人驾驶功能提出更高的要求,所以需要对无人驾驶的可靠性进行验证。
2、现有技术中,在无人驾驶可靠性的验证过程中,仿真测试和真实车辆使用的是两套独立的驾驶舱,在实际操作过程中,需要一部分研发人员在实车驾驶舱上配合调试和反馈车辆状态,另一部分研发人员在遥控驾驶舱进行远程控制,模拟并验证自动驾驶和遥控驾驶过程,但是这可能导致验证过程与实际情况存在差异,同时,现有技术中这种方法需要研发测试人员出差去现场,配合验证无人驾驶的效果,增加差旅和人力成本,当验证效果不佳时,所需的调试周期相对较长,且验证过程较复杂,存在滞后性。
技术实现思路
1、本发明提供一种无人驾驶车辆的可靠性验证系统及方法,用以解决现有技术中人力成本高、所需的调试周期相对较长,且验证过程较复杂的缺陷。
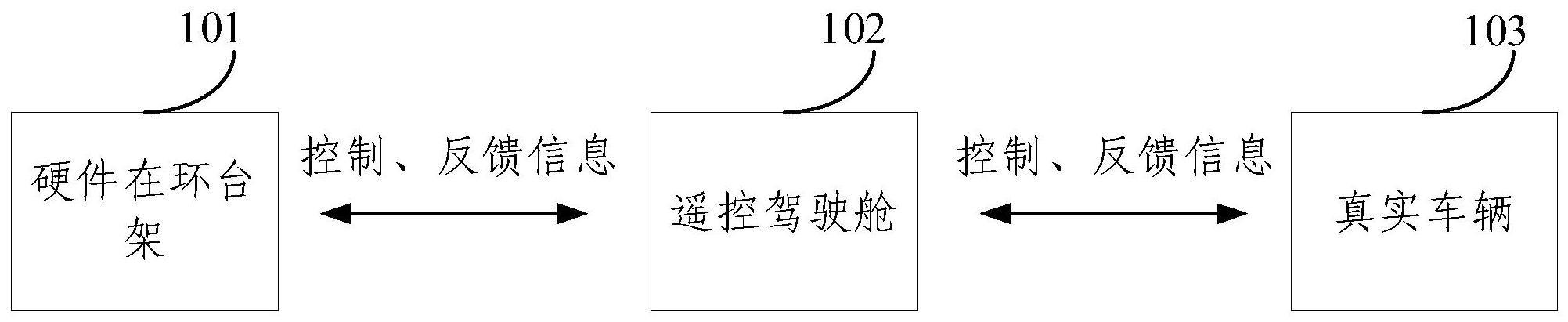
2、本发明提供一种无人驾驶车辆的可靠性验证系统,包括:硬件在环台架、遥控驾驶舱和真实车辆;
3、所述硬件在环台架包括仿真车辆;
4、所述遥控驾驶舱分别与所述硬件在环台架和真实车辆通讯连接;所述仿真车辆中和所述真实车辆中配置有相同的遥控驾驶程序;
5、所述遥控驾驶舱用于远程控制所述真实车辆和仿真车辆;
6、所述真实车辆用于响应所述遥控驾驶舱的第一控制指令,并获取车辆状态参数和周围环境信息,并将所述车辆状态参数和周围环境信息发送至所述遥控驾驶舱;
7、所述遥控驾驶舱还用于将所述车辆状态参数和周围环境信息同步至所述硬件在环台架;
8、所述仿真车辆用于在所述硬件在环台架中,根据所述遥控驾驶舱的第二控制指令、车辆状态参数和周围环境信息进行无人驾驶的可靠性验证。
9、可选地,所述周围环境信息包括周围环境视频信息,所述真实车辆还包括摄像头,所述摄像头用于获取所述周围环境视频信息。
10、可选地,
11、所述遥控驾驶舱基于第一通讯链路远程控制所述真实车辆;
12、所述真实车辆基于第二通讯链路将所述车辆状态参数和周围环境信息发送至所述遥控驾驶舱。
13、可选地,
14、所述遥控驾驶舱基于第三通讯链路远程控制所述仿真车辆;
15、所述遥控驾驶舱基于第四通讯链路将所述车辆状态参数和周围环境信息同步至所述硬件在环台架。
16、可选地,所述硬件在环台架还用于根据所述周围环境信息构建扩展环境信息;所述仿真车辆还用于在所述硬件在环台架中,根据所述遥控驾驶舱的第二控制指令、车辆状态参数、周围环境信息以及扩展环境信息进行无人驾驶的可靠性验证。
17、本发明还提供一种无人驾驶车辆的可靠性验证方法,应用于遥控驾驶舱,包括:
18、向真实车辆发送第一控制指令,并接收所述真实车辆反馈的车辆状态参数和周围环境信息;
19、将所述车辆状态参数和周围环境信息同步至硬件在环台架,并向仿真车辆发送第二控制指令,以指示所述硬件在环台架中的仿真车辆根据所述第二控制指令、车辆状态参数和周围环境信息进行无人驾驶的可靠性验证。
20、本发明还提供一种无人驾驶车辆的可靠性验证方法,应用于硬件在环台架,包括:
21、接收车辆状态参数和周围环境信息;所述车辆状态参数和周围环境信息是遥控驾驶舱发送的,所述车辆状态参数和周围环境信息是真实车辆根据遥控驾驶舱发送的第一控制指令获取的;
22、使仿真车辆接收述第二控制指令,并使所述仿真车辆根据所述第二控制指令、车辆状态参数和周围环境信息进行无人驾驶的可靠性验证,所述第二控制指令是遥控驾驶舱发送的。
23、本发明还提供一种无人驾驶车辆的可靠性验证方法,应用于真实车辆,包括:
24、接收第一控制指令,所述第一控制指令是遥控驾驶舱发送的;
25、根据所述第一控制指令获取车辆状态参数和周围环境信息;
26、将所述车辆状态参数和周围环境信息发送至所述遥控驾驶舱,以指示所述遥控驾驶舱将所述车辆状态参数和周围环境信息同步至硬件在环台架,并指示所述遥控驾驶舱发送第二控制指令至仿真车辆,以使所述硬件在环台架中的仿真车辆根据所述第二控制指令、车辆状态参数和周围环境信息进行无人驾驶的可靠性验证。
27、本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现所述无人驾驶车辆的可靠性验证方法。
28、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述无人驾驶车辆的可靠性验证方法。
29、本发明提供的一种无人驾驶车辆的可靠性验证系统及方法,系统包括硬件在环台架、遥控驾驶舱和真实车辆;所述硬件在环台架包括仿真车辆;所述遥控驾驶舱分别与所述硬件在环台架和真实车辆通讯连接;所述仿真车辆中和所述真实车辆中配置有相同的遥控驾驶程序;所述遥控驾驶舱用于远程控制所述真实车辆和仿真车辆;所述真实车辆用于响应所述遥控驾驶舱的第一控制指令,并获取车辆状态参数和周围环境信息,并将所述车辆状态参数和周围环境信息发送至所述遥控驾驶舱;所述遥控驾驶舱还用于将所述车辆状态参数和周围环境信息同步至所述硬件在环台架;所述仿真车辆用于在所述硬件在环台架中,根据所述遥控驾驶舱的第二控制指令、车辆状态参数和周围环境信息进行无人驾驶的可靠性验证。即本发明中利用同一个遥控驾驶舱分别遥控真实车辆和硬件在环台架中的仿真车辆,将真实车辆的状态参数和周围环境信息通过遥控驾驶舱同步至硬件在环台架,且真实车辆和硬件在环台架中的仿真车辆中的遥控驾驶程序相同,这样无需研发人员去现场进行调制,可以实现远程遥控真实车辆,降低人力成本,且通过遥控驾驶舱进行数据同步后,即可进行无人驾驶的可靠性验证,调试和验证过程简单。
技术特征:
1.一种无人驾驶车辆的可靠性验证系统,其特征在于,包括:硬件在环台架、遥控驾驶舱和真实车辆;
2.根据权利要求1所述的无人驾驶车辆的可靠性验证系统,其特征在于,所述周围环境信息包括周围环境视频信息,所述真实车辆还包括摄像头,所述摄像头用于获取所述周围环境视频信息。
3.根据权利要求2所述的无人驾驶车辆的可靠性验证系统,其特征在于,
4.根据权利要求2所述的无人驾驶车辆的可靠性验证系统,其特征在于,
5.根据权利要求1-4任一项所述的无人驾驶车辆的可靠性验证系统,其特征在于,
6.一种无人驾驶车辆的可靠性验证方法,应用于遥控驾驶舱,其特征在于,包括:
7.一种无人驾驶车辆的可靠性验证方法,应用于硬件在环台架,其特征在于,包括:
8.一种无人驾驶车辆的可靠性验证方法,应用于真实车辆,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求6至8任一项所述无人驾驶车辆的可靠性验证方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求6至8任一项所述无人驾驶车辆的可靠性验证方法。
技术总结
本发明提供一种无人驾驶车辆的可靠性验证系统及方法,属于无人驾驶领域,系统包括:硬件在环台架、遥控驾驶舱和真实车辆;硬件在环台架包括仿真车辆;遥控驾驶舱用于远程控制真实车辆和仿真车辆;真实车辆用于响应遥控驾驶舱的第一控制指令,并获取车辆状态参数和周围环境信息,并将车辆状态参数和周围环境信息发送至遥控驾驶舱;遥控驾驶舱还用于将车辆状态参数和周围环境信息同步至硬件在环台架;仿真车辆用于在硬件在环台架中,根据遥控驾驶舱的第二控制指令、车辆状态参数和周围环境信息进行无人驾驶的可靠性验证。本发明能够降低人力成本,且利用本发明进行无人驾驶的可靠性验证,调试和验证过程简单。
技术研发人员:甄会君,李敏,于敏
受保护的技术使用者:三一智矿科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!