一种无人机着陆自动驶出引导控制方法与流程
本申请属于飞行控制,特别涉及一种无人机着陆自动驶出引导控制方法。
背景技术:
1、大型固定翼无人机现有的回收方式仍旧为:降落后减速滑跑至刹停,由牵引车拖回停机坪;大型机场有人机、无人机混编连续放飞及着陆过程中,跑道资源紧张,对各自着陆回收的时间、资源有更严格要求。
2、目前,在无人机自主驶入/驶出方向的研究已有一定成果并有所应用,而有关降落滑跑到驶出阶段的自主过渡控制尚属空白。此过渡阶段的自主控制涉及到多种控制技术及实际问题,较为复杂。
3、因此,希望有一种技术方案来克服或至少减轻现有技术的至少一个上述缺陷。
技术实现思路
1、本申请的目的是提供了一种无人机着陆自动驶出引导控制方法,以解决现有技术存在的至少一个问题。
2、本申请的技术方案是:
3、一种无人机着陆自动驶出引导控制方法,包括:
4、步骤一、获取自动驶出权限设置管理策略、阶段状态管理策略、速度控制策略、驶出计划策略、滑行轨迹策略、轨迹跟踪策略、人工干预及故障策略;
5、步骤二、当无人机进入着陆滑跑阶段后,根据所述自动驶出权限设置管理策略、所述阶段状态管理策略、所述速度控制策略、所述驶出计划策略、所述滑行轨迹策略、所述轨迹跟踪策略、所述人工干预及故障策略,实现无人机着陆自动驶出引导控制。
6、在本申请的至少一个实施例中,所述自动驶出权限设置管理策略包括:
7、默认无人机进入着陆滑跑阶段后初始授权状态为允许自动驶出;
8、允许操控员手动改变授权状态,手动改变授权状态的方式为操控员通过地面控制站向无人机发送允许自动驶出指令或禁止自动驶出指令;
9、手动改变授权状态后,若遭遇控制链路中断,授权状态不发生改变。
10、在本申请的至少一个实施例中,
11、当无人机进入着陆滑跑阶段,并减速至v0后,无人机执行自动驶出,若在此之后授权状态变为禁止自动驶出,则无人机仍继续执行自动驶出;
12、当无人机进入着陆滑跑阶段,并减速至v0后,无人机未执行自动驶出,若在此之后授权状态变为允许自动驶出,则无人机仍继续减速滑行;
13、其中,v0为无人机自动驶出期间沿机场跑道滑行至驶出口过程中的稳定滑行速度。
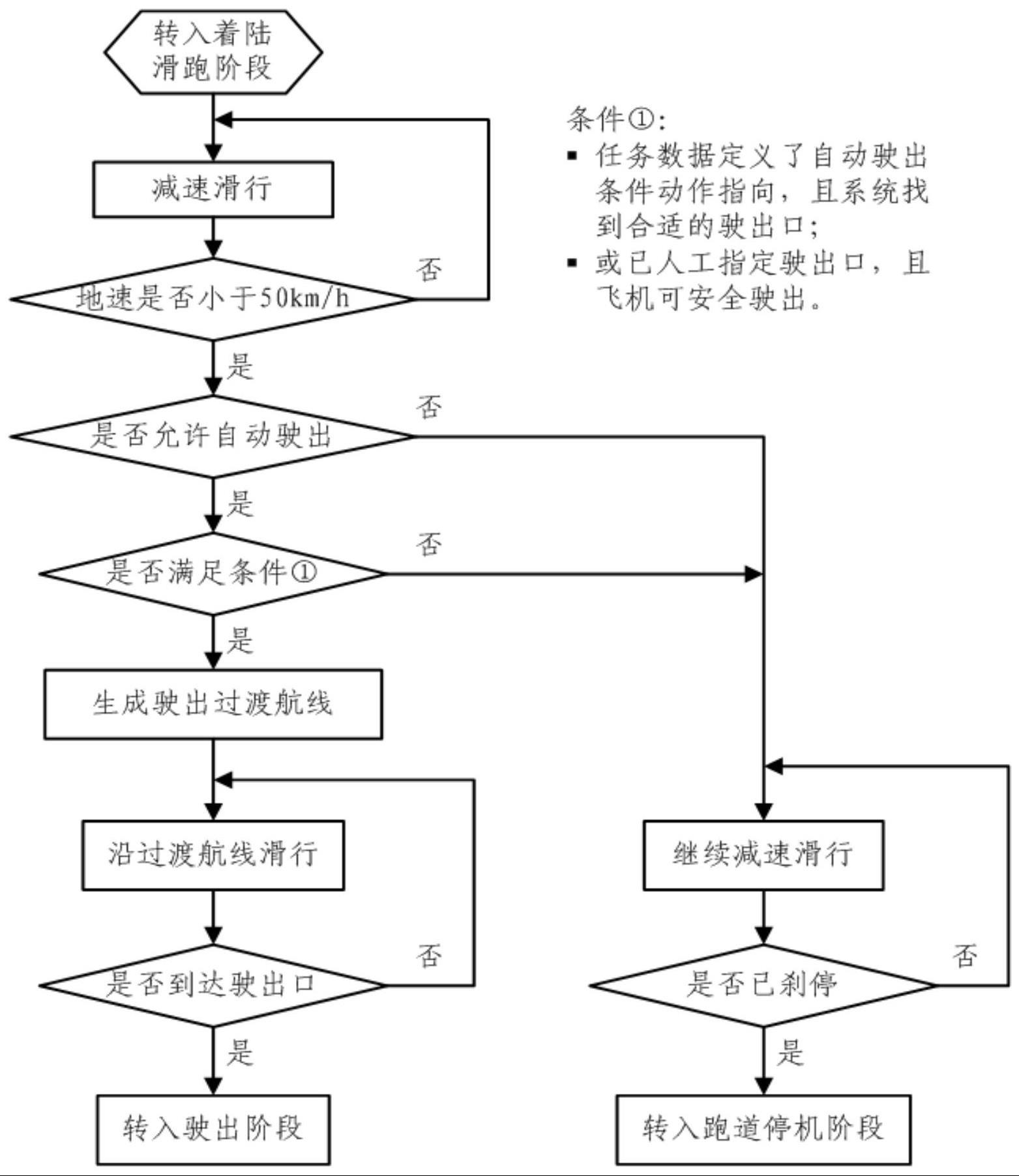
14、在本申请的至少一个实施例中,所述阶段状态管理策略包括:
15、当无人机进入着陆滑跑阶段后,按照速度控制策略进行减速滑行,并在减速至v0后,判断授权状态是否为允许自动驶出;
16、若授权状态不是允许自动驶出,则无人机继续减速滑行,直至在跑道刹停,无人机进入跑道停机阶段;
17、若授权状态是允许自动驶出,则无人机执行自动驶出,并根据驶出计划策略查找可用的驶出口;
18、若查找到可用的驶出口,则根据滑行轨迹策略生成从当前位置到驶出口的滑行轨迹,当无人机沿所述滑行轨迹滑行至驶出口后,无人机进入驶出阶段;
19、若没有查找到可用的驶出口,则无人机继续减速滑行,直至在跑道刹停,无人机进入跑道停机阶段。
20、在本申请的至少一个实施例中,所述速度控制策略包括:
21、当无人机进入着陆滑跑阶段后,按照预先设置的刹车规律减速滑行,在减速至v0后,若授权状态是允许自动驶出且查找到可用的驶出口,则无人机按照滑行轨迹滑行;否则无人机仍继续按照预先设置的刹车规律减速滑行。
22、在本申请的至少一个实施例中,所述驶出计划策略包括:
23、若未预先设置驶出计划,且操控员未临时设置驶出计划,则无人机判定为未查找到可用的驶出口;
24、若预先设置了驶出计划,且操控员未临时设置驶出计划,则无人机根据预先设置的驶出计划查找可用的驶出口;
25、若未预先设置驶出计划,且操控员临时设置了驶出计划,则无人机根据操控员临时设置的驶出计划查找可用的驶出口;
26、若预先设置了驶出计划,且操控员临时设置了驶出计划,则无人机根据操控员临时设置的驶出计划查找可用的驶出口,在根据操控员临时设置的驶出计划查找可用的驶出口的过程中,若操控员取消了临时设置的驶出计划,则无人机将重新根据预先设置的驶出计划查找可用的驶出口。
27、在本申请的至少一个实施例中,所述驶出计划至少包括驶出口的优先级、驶出口中心点的经纬度、驶出口的转出方向以及到达驶出口所允许的最大滑行速度;
28、根据驶出计划查找可用的驶出口,包括:
29、按照驶出口的优先级,依次对驶出口进行如下判断:
30、判断该驶出口是否在无人机前方且无人机减速滑行后是否能够到达该驶出口;
31、若是,根据滑行轨迹策略生成从前位置到该驶出口的滑行轨迹,并判断所述滑行轨迹是否满足安全驶出要求;若是,则确定该驶出口为可用的驶出口;
32、若否,则确定该驶出口为不可用的驶出口,并对下一个驶出口进行判断。
33、在本申请的至少一个实施例中,所述滑行轨迹策略包括:
34、当查找到可用的驶出口时,生成从当前位置到驶出口的滑行轨迹,所述滑行轨迹包括直线段和圆弧段,其中,
35、直线段从初始判断位置开始到驶出口前;
36、圆弧段为连接直线段与驶出航线的首航段,且
37、当驶出口方向与减速滑行方向为钝角时,圆弧段半径大于无人机最小转弯半径,否则无人机转弯能力不满足安全驶出要求;
38、当驶出口方向与减速滑行方向垂直或夹角为锐角时,无人机满足安全驶出要求。
39、在本申请的至少一个实施例中,所述轨迹跟踪策略包括:
40、在无人机按照滑行轨迹滑行过程中,执行地面滑行纠偏,采用前轮转弯、差动刹车、航向控制舵面修正相对于跑道中线的偏差量,实现沿跑道中线滑行。
41、在本申请的至少一个实施例中,所述人工干预及故障策略包括:
42、在无人机执行自动驶出前,允许操控员临时设置驶出计划;
43、允许操控员通过地面控制站随时向无人机发送终止自动驶出指令,在收到地面控制站的终止自动驶出指令后,无人机终止当前自动驶出过程,并按照预先设置的刹车规律减速滑行,直至在跑道刹停,无人机进入跑道停机阶段;
44、无人机根据自身故障及异常状态判定需要终止自动驶出后,无人机终止当前自动驶出过程,并按照预先设置的刹车规律减速滑行,直至在跑道刹停,无人机进入跑道停机阶段;
45、当无人机进入跑道停机阶段后,操控员通过地面向无人机发送手动选取的驶出口和人工滑行指令,实现无人机引导控制。
46、发明至少存在以下有益技术效果:
47、本申请的无人机着陆自动驶出引导控制方法,能够应用于大型固定翼无人机着陆滑跑到驶出阶段过渡的自动控制,可以提升无人机自主能力并减少跑道占用时间,提高个体效率及机场跑道利用率。
技术特征:
1.一种无人机着陆自动驶出引导控制方法,其特征在于,包括:
2.根据权利要求1所述的无人机着陆自动驶出引导控制方法,其特征在于,所述自动驶出权限设置管理策略包括:
3.根据权利要求2所述的无人机着陆自动驶出引导控制方法,其特征在于,
4.根据权利要求3所述的无人机着陆自动驶出引导控制方法,其特征在于,所述阶段状态管理策略包括:
5.根据权利要求4所述的无人机着陆自动驶出引导控制方法,其特征在于,所述速度控制策略包括:
6.根据权利要求5所述的无人机着陆自动驶出引导控制方法,其特征在于,所述驶出计划策略包括:
7.根据权利要求6所述的无人机着陆自动驶出引导控制方法,其特征在于,所述驶出计划至少包括驶出口的优先级、驶出口中心点的经纬度、驶出口的转出方向以及到达驶出口所允许的最大滑行速度;
8.根据权利要求7所述的无人机着陆自动驶出引导控制方法,其特征在于,所述滑行轨迹策略包括:
9.根据权利要求8所述的无人机着陆自动驶出引导控制方法,其特征在于,所述轨迹跟踪策略包括:
10.根据权利要求9所述的无人机着陆自动驶出引导控制方法,其特征在于,所述人工干预及故障策略包括:
技术总结
本申请属于飞行控制技术领域,特别涉及一种无人机着陆自动驶出引导控制方法。包括:步骤一、获取自动驶出权限设置管理策略、阶段状态管理策略、速度控制策略、驶出计划策略、滑行轨迹策略、轨迹跟踪策略、人工干预及故障策略;步骤二、当无人机进入着陆滑跑阶段后,根据所述自动驶出权限设置管理策略、所述阶段状态管理策略、所述速度控制策略、所述驶出计划策略、所述滑行轨迹策略、所述轨迹跟踪策略、所述人工干预及故障策略,实现无人机着陆自动驶出引导控制。本申请能够应用于大型固定翼无人机着陆滑跑到驶出阶段过渡的自动控制,可以提升无人机自主能力并减少跑道占用时间,提高个体效率及机场跑道利用率。
技术研发人员:黄开,王允辉,袁庆洋,张冬
受保护的技术使用者:中国航空工业集团公司沈阳飞机设计研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!