机器人的路径优化方法、移动机器人及存储介质与流程
本申请涉及路径规划领域,尤其涉及一种机器人的路径优化方法、移动机器人及存储介质。
背景技术:
1、现有的移动机器人的路径规划算法通常是在离散的节点上进行计算,并且由于离散误差、局部最优解、约束限制等原因,生成的路径通常不够光滑,导致在移动机器人运动时出现运动不连续、控制困难、跟踪误差等问题。为了解决上述问题,亟需一种在离散路径点的基础上对移动机器人路径进行优化的方法。
技术实现思路
1、本申请的主要目的在于提供一种机器人的路径优化方法、移动机器人及存储介质,旨在对机器人的移动路径进行优化,得到足够光滑的目标路径。
2、第一方面,本申请提供一种机器人的路径优化方法,所述机器人的路径优化方法包括以下步骤:
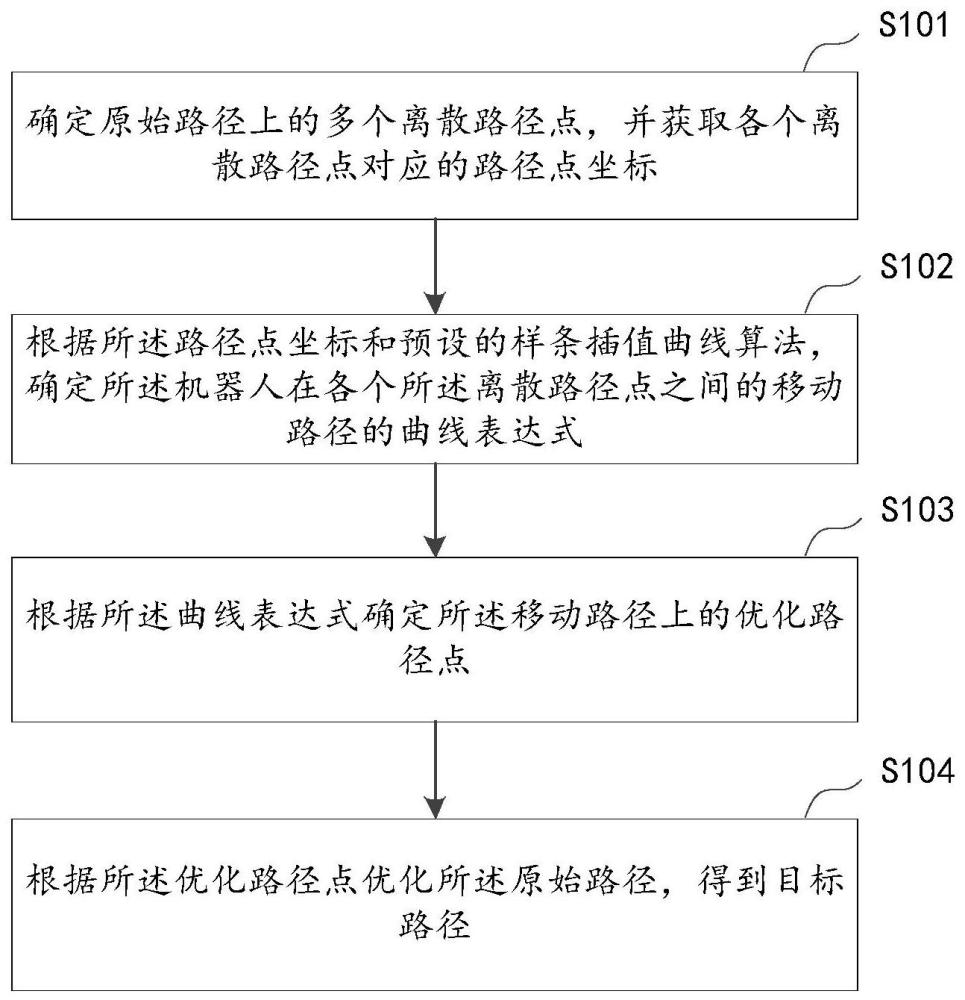
3、确定原始路径上的多个离散路径点,并获取各个离散路径点对应的路径点坐标;
4、根据所述路径点坐标和预设的样条插值曲线算法,确定所述机器人在各个所述离散路径点之间的移动路径的曲线表达式;
5、根据所述曲线表达式确定所述移动路径上的优化路径点;
6、根据所述优化路径点优化所述原始路径,得到目标路径。
7、第二方面,本申请还提供一种移动机器人,所述移动机器人包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现如上述的机器人的路径优化方法。
8、第三方面,本申请还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,其中所述计算机程序被处理器执行时,实现如上述的机器人的路径优化方法。
9、本申请提供一种机器人的路径优化方法、移动机器人及存储介质,本申请通过确定原始路径上的多个离散路径点,并获取各个离散路径点对应的路径点坐标;根据所述路径点坐标和预设的样条插值曲线算法,确定所述机器人在各个所述离散路径点之间的移动路径的曲线表达式;根据所述曲线表达式确定所述移动路径上的优化路径点;根据所述优化路径点优化所述原始路径,得到目标路径。由于根据原始路径上的离散路径点确定目标路径的优化路径点,在避免目标路径相对于原始路径发生偏移的情况下,提高了机器人移动路径的光滑程度。
技术特征:
1.一种机器人的路径优化方法,其特征在于,所述方法包括:
2.根据权利要求1所述的机器人的路径优化方法,其特征在于,所述确定原始路径上的多个离散路径点,包括:
3.根据权利要求2所述的机器人的路径优化方法,其特征在于,所述采样稀疏度用于指示作为采样间隔的第一预设数量,所述基于预设的采样稀疏度对所述原始路径点进行采样,得到所述离散路径点,包括:
4.根据权利要求3所述的机器人的路径优化方法,其特征在于,所述基于预设的采样稀疏度对所述原始路径点进行采样,得到所述离散路径点,包括:
5.根据权利要求1所述的机器人的路径优化方法,其特征在于,所述根据所述曲线表达式确定所述移动路径上的优化路径点,包括:
6.根据权利要求5所述的机器人的路径优化方法,其特征在于,所述根据所述曲线表达式,每隔预设曲线长度在所述曲线表达式指示的移动路径上插入所述优化路径点,包括:
7.根据权利要求6所述的机器人的路径优化方法,其特征在于,所述每隔预设的横坐标步长,计算所述曲线表达式对应的目标曲线长度,包括:
8.根据权利要求1所述的机器人的路径优化方法,其特征在于,所述根据所述路径点坐标和预设的样条插值曲线算法,确定所述机器人在各个所述离散路径点之间的移动路径的曲线表达式,包括:
9.根据权利要求1-8任一项所述的机器人的路径优化方法,其特征在于,所述方法在所述确定原始路径上的多个离散路径点,并获取各个离散路径点对应的路径点坐标之前,包括:
10.根据权利要求1-8任一项所述的机器人的路径优化方法,其特征在于,所述方法在所述确定原始路径上的多个离散路径点,并获取各个离散路径点对应的路径点坐标之前,还包括:
11.一种移动机器人,其特征在于,所述移动机器人包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现如权利要求1至10中任一项所述的机器人的路径优化方法的步骤。
12.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,其中所述计算机程序被处理器执行时,实现如权利要求1至10中任一项所述的机器人的路径优化方法的步骤。
技术总结
本申请涉及路径规划领域,提供一种机器人的路径优化方法、移动机器人及存储介质,该方法包括:确定原始路径上的多个离散路径点,并获取各个离散路径点对应的路径点坐标;根据所述路径点坐标和预设的样条插值曲线算法,确定所述机器人在各个所述离散路径点之间的移动路径的曲线表达式;根据所述曲线表达式确定所述移动路径上的优化路径点;根据所述优化路径点优化所述原始路径,得到目标路径。在避免目标路径相对于原始路径发生偏移的情况下,提高了机器人移动路径的光滑程度。
技术研发人员:曹杰华,王登峰,王斌
受保护的技术使用者:深圳竹芒科技有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!