基于等价输入干扰的旋翼机过渡段的切换控制方法及系统
本发明涉及倾转旋翼机过渡段切换控制,具体是涉及一种基于等价输入干扰的旋翼机过渡段的切换控制方法及系统。
背景技术:
1、倾转旋翼机是一种新构型复合飞行器,根据飞行模式可分为直升机模式、过渡模式和固定翼模式。倾转旋翼机在过渡飞行的过程中,旋翼随发动机短舱倾转,在此过程中,飞行器气动特性变化较大,由此引起的气动干扰直接威胁飞行器稳定性。对于这样一个强非线性、强耦合和时变动力学的复杂系统,飞行控制系统的设计面临较大困难。因此,如何设计一种有效的过渡模式飞行控制器是一项具有挑战性的任务。
2、在近年有关倾转旋翼机过渡模态的研究中,常见的控制方法有神经网络pid、增益调度方法及多模型自适应方法等。从控制方法的角度上分析,现有的非线性控制方法在处理整个过渡模式下的控制有一定困难,难以保证系统的稳定性和可靠性,倾转旋翼飞行器的发动机短舱一般在 0°到 95°之间同步倾转,因此基于多模式的平滑切换控制方法在解决转换模式的飞行控制问题上更具优势。另外,在过渡模式的控制过程中,系统响应时间必须在一定的时间范围内完成,因此在控制器设计过程中需要考虑切换系统有限时间稳定的问题。
3、倾转旋翼机在过渡飞行过程中,会受到多种干扰,除由自身的气动特性引起的干扰外,还有外部环境中存在的干扰,以上复合干扰的存在将会影响系统性能甚至直接威胁飞行安全。
4、另外,控制器在实际过程中,受执行器、传感器等参数摄动的影响,导致控制器的实际输出存在一定摄动,表现为控制器的不确定性,这对切换控制系统的性能也有较大影响。
技术实现思路
1、发明目的:针对以上缺点,本发明提供一种实现倾转旋翼机在过渡飞行模式下平滑、稳定的基于等价输入干扰的倾转旋翼机过渡段的切换控制方法及控制系统。
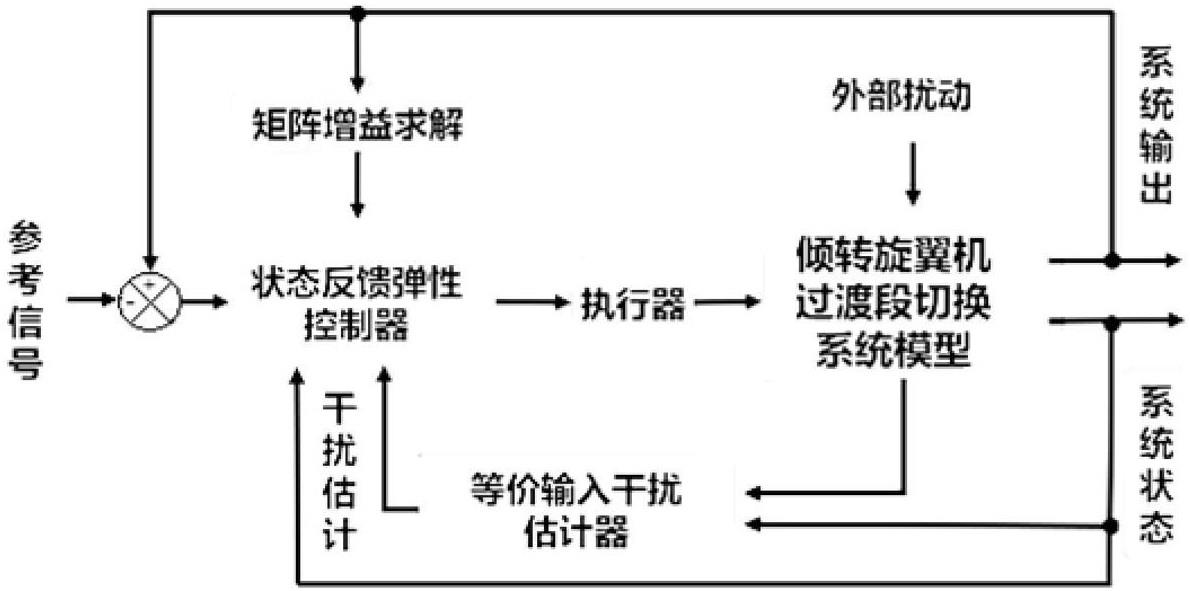
2、技术方案:为解决上述问题,本发明采用一种基于等价输入干扰的旋翼机过渡段的切换控制方法,包括以下步骤:
3、(1)基于倾转旋翼机过渡段的飞行动力学模型,构建包括外部干扰的线性切换系统;
4、(2)获取外部干扰对线性切换系统输出的扰动信息,构建等价输入干扰估计器对扰动信息进行估计,得到等价输入干扰;
5、(3)将估计后的等价输入干扰返回构建线性切换系统的控制器;
6、(4)根据线性切换系统的切换次数,求解得到使得切换过程稳定的各子系统的平均驻留时间,得到基于平均驻留时间的切换规则;
7、(5)基于切换规则得到线性切换系统有限时间稳定条件,利用条件中的线性矩阵不等式求解控制器的增益矩阵,得到实际控制器;
8、(6)通过实际控制器对倾转旋翼机过渡段的切换进行控制。
9、进一步的,所述步骤(1)中包括外部干扰的线性切换系统为:
10、,
11、其中,为线性切换系统的状态向量,为状态向量关于时间的一阶导数,为线性切换系统的控制输入,为切换信号,为外部扰动,为系统矩阵,为输入矩阵,为干扰矩阵。
12、进一步的,包括等价输入干扰的线性切换系统为:
13、,
14、其中,表示等价输入干扰。
15、进一步的,所述步骤(2)中通过状态观测器获取扰动信息,状态观测器模型为:
16、,
17、其中,为状态向量的观测值,为观测值关于时间的一阶导数,为状态观测器模型的输入向量,为观测器增益矩阵;
18、等价输入干扰的估计值为:
19、,
20、其中,为矩阵的广义逆矩阵,为可调谐增益矩阵,用以提高设计灵活性,为观测误差,。
21、进一步的,通过滤波器滤除等价输入干扰的估计值中的高频噪声,估计值为滤波器的输入,得到如下状态空间方程:
22、,
23、,
24、其中,为过程向量,为向量关于时间的一阶导数,为滤波后的等价输入干扰的估计值,、、均为常数系数矩阵。
25、进一步的,所述步骤(3)中构建的控制器为:
26、,
27、设计降低控制增益摄动敏感性的弹性控制器,采用以下公式:
28、,
29、,
30、,
31、其中,、为控制器增益,、为弹性项,、、、为常数矩阵,、为有界的实矩阵函数。
32、进一步的,所述弹性控制器中包括内部模型:
33、,
34、其中,为内部模型的状态向量,为向量关于时间的一阶导数,为内部模型的输入向量,和为已知的常数矩阵。
35、本发明还采用一种基于等价输入干扰的旋翼机过渡段的切换控制系统,包括模型建立模块,用于基于倾转旋翼机过渡段的飞行动力学模型,构建包括外部干扰的线性切换系统;
36、干扰等价估计模块,用于获取外部干扰对线性切换系统输出的扰动信息,构建等价输入干扰估计器对扰动信息进行估计,得到等价输入干扰;
37、控制器构建模块,用于将估计后的等价输入干扰返回构建线性切换系统的控制器;并基于切换规则得到线性切换系统有限时间稳定条件,利用条件中的线性矩阵不等式求解控制器的增益矩阵,得到实际控制器;
38、切换规则确定模块,用于根据线性切换系统的切换次数,求解得到使得切换过程稳定的各子系统的平均驻留时间,得到基于平均驻留时间的切换规则;
39、控制模块,通过实际控制器对倾转旋翼机过渡段的切换进行控制。
40、有益效果:本发明相对于现有技术,其显著优点是通过等价输入干扰能够有效抑制外部干扰对系统稳定性的影响,提高整个控制系统的扰动抑制性能,并通过弹性控制器解决了控制中存在的控制增益摄动问题,通过本技术中设计的控制器,使倾转旋翼飞行器在过渡模式下稳定切换,并增强系统的鲁棒性和非脆弱性。
技术特征:
1.一种基于等价输入干扰的旋翼机过渡段的切换控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的切换控制方法,其特征在于,所述步骤(1)中包括外部干扰的线性切换系统为:
3.根据权利要求2所述的切换控制方法,其特征在于,包括等价输入干扰的线性切换系统为:
4.根据权利要求3所述的切换控制方法,其特征在于,所述步骤(2)中通过状态观测器获取扰动信息,状态观测器模型为:
5.根据权利要求4所述的切换控制方法,其特征在于,通过滤波器滤除等价输入干扰的估计值中的高频噪声,估计值为滤波器的输入,得到如下状态空间方程:
6.根据权利要求5所述的切换控制方法,其特征在于,所述步骤(3)中构建的控制器为:
7.根据权利要求6所述的切换控制方法,其特征在于,所述步骤(3)中设计降低控制增益摄动敏感性的弹性控制器,采用以下公式:
8.根据权利要求1所述的切换控制方法,其特征在于,所述弹性控制器中包括内部模型:
9.根据权利要求1所述的切换控制方法,其特征在于,所述步骤(4)中平均驻留时间为:
10.一种基于等价输入干扰的旋翼机过渡段的切换控制系统,其特征在于,包括模型建立模块,用于基于倾转旋翼机过渡段的飞行动力学模型,构建包括外部干扰的线性切换系统;
技术总结
本发明公开了一种基于等价输入干扰的旋翼机过渡段的切换控制方法,基于倾转旋翼机过渡段的飞行动力学模型,构建包括外部干扰的线性切换系统;获取外部干扰对线性切换系统输出的扰动信息,构建等价输入干扰估计器对扰动信息进行估计,将估计后的等价输入干扰返回构建线性切换系统的控制器;求解得到使得切换过程稳定的各子系统的平均驻留时间,基于平均驻留时间的切换规则得到线性切换系统有限时间稳定条件,利用条件中的线性矩阵不等式求解控制器的增益矩阵,得到实际控制器;通过实际控制器对倾转旋翼机过渡段的切换进行控制。通过等价输入干扰能够有效抑制外部干扰对系统稳定性的影响,提高整个控制系统的扰动抑制性能。
技术研发人员:邵书义,安峥材,陈谋
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!