基于位-力-滑主副次分级的耕深控制方法及系统与流程
本发明涉及耕深控制,尤其涉及基于位-力-滑主副次分级的耕深控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、随着科技的飞速发展,现代农业对耕种质量的要求进一步提高,耕深均匀性是评价耕种质量的关键性指标,对农作物的生长起到了决定性作用,直接影响到作物产量和品质。拖拉机作为耕种作业的载体,在现代化农业生产中发挥着重要作用,在耕作过程中,拖拉机时刻受到复杂的外界因素干扰,难以保证耕深的均匀性。针对此问题,国内外学者提出了多种耕深主动控制方法,常见的控制方法有位置控制、阻力控制和滑转率控制,这三种控制方法均为单因素调节,即只使用一种影响因素进行耕深调节。近些年来有学者提出将单因素调节两两结合从而形成混合调节的控制方法,由于混合调节综合了多种耕深影响因素,其控制性能一般优于单因素调节,但是目前的综合调节大多为切换式调节,即根据不同影响因素的权重切换不同的调节模式,并没有同时考虑多个影响因素对耕深的复合交互影响,对耕深的调节误差较大,不能保证耕深的稳定性。
技术实现思路
1、本发明为了解决上述问题,提出了基于位-力-滑主副次分级的耕深控制方法及系统,同时根据位置、阻力和滑转率对耕深进行控制,保证了耕深的均匀性。
2、为实现上述目的,本发明采用如下技术方案:
3、第一方面,提出了基于位-力-滑主副次分级的耕深控制方法,包括:
4、获取拖拉机耕作过程中的实际耕深、阻力和滑转率;
5、分别计算实际耕深与目标耕深的差值及其差值变化率、阻力与设定阻力的差值及其差值变化率,和滑转率与设定滑转率的差值及其差值变化率;
6、对阻力与设定阻力的差值及其差值变化率进行模糊推理,确定副级pid调节量;
7、对滑转率与设定滑转率的差值及其差值变化率进行模糊推理,确定次级pid调节量;
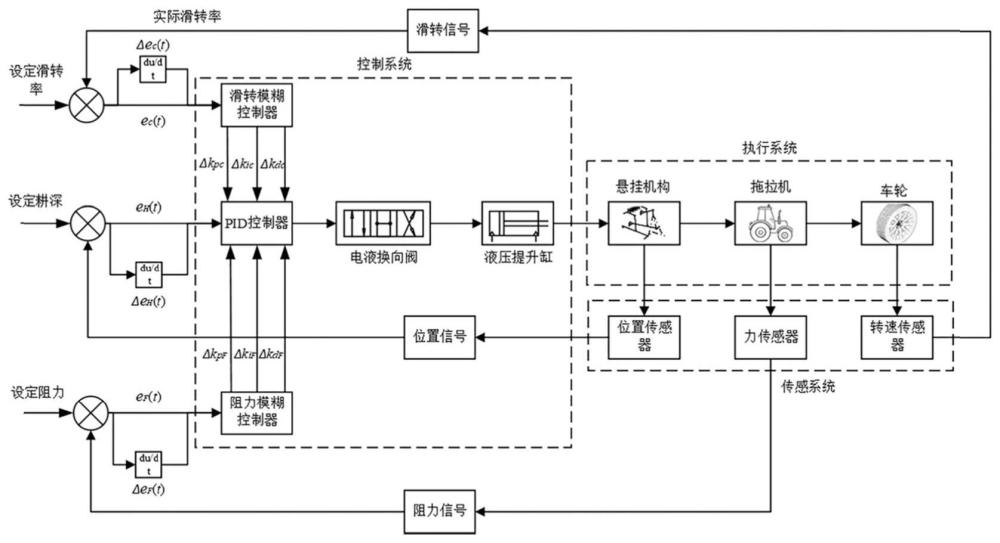
8、根据实际耕深与目标耕深的差值及其差值变化率,对耕深进行pid控制,在pid控制过程中,将副级pid调节量、次级pid调节量与pid控制参数设定值相加,获得pid控制参数。
9、第二方面,提出了基于位-力-滑主副次分级的耕深控制系统,包括:
10、数据获取模块,用于获取拖拉机耕作过程中的实际耕深、阻力和滑转率;
11、各差值及其差值变化率控制器,用于分别计算实际耕深与目标耕深的差值及其差值变化率、阻力与设定阻力的差值及其差值变化率,和滑转率与设定滑转率的差值及其差值变化率;
12、阻力模糊控制器,用于对阻力与设定阻力的差值及其差值变化率进行模糊推理,确定副级pid调节量;
13、滑转率模糊控制器,用于对滑转率与设定滑转率的差值及其差值变化率进行模糊推理,确定次级pid调节量;
14、耕深pid控制器,用于根据实际耕深与目标耕深的差值及其差值变化率,对耕深进行pid控制,在pid控制过程中,将副级pid调节量、次级pid调节量与pid控制参数设定值相加,获得pid控制参数。
15、第三方面,提出了一种电子设备,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成基于位-力-滑主副次分级的耕深控制方法所述的步骤。
16、第四方面,提出了一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,完成基于位-力-滑主副次分级的耕深控制方法所述的步骤。
17、与现有技术相比,本发明的有益效果为:
18、本发明将影响耕深均匀性的三个因素分别组成三个控制回路,主级控制回路的控制因素为位置因素,主级控制回路用于直接控制悬挂机构的实际高度,从而实现调节耕深的目的。副级控制回路的控制因素为阻力因素,次级控制回路的控制因素为滑转率因素,副级控制回路和次级控制回路通过对主级控制回路中pid控制参数的多级调整实现对悬挂机构的间接控制,从而实现对耕深的分级调节。该控制方法通过对控制回路的主、副、次级划分来充分利用多因素之间的复合交互作用,从而实现提高耕深均匀性的目的。
19、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.基于位-力-滑主副次分级的耕深控制方法,其特征在于,包括:
2.如权利要求1所述的基于位-力-滑主副次分级的耕深控制方法,其特征在于,通过pid控制参数对拖拉机进行pid控制,使得实际耕深与目标耕深之间的误差最小。
3.如权利要求1所述的基于位-力-滑主副次分级的耕深控制方法,其特征在于,通过pid控制器对耕深进行pid控制,pid控制器以实际耕深与目标耕深的差值及其差值变化率为输入,输出用于调节拖拉机悬挂机构位置的控制信号。
4.如权利要求1所述的基于位-力-滑主副次分级的耕深控制方法,其特征在于,获取拖拉机耕作过程中的车轮转速;
5.如权利要求1所述的基于位-力-滑主副次分级的耕深控制方法,其特征在于,通过阻力模糊控制器对阻力与设定阻力的差值及其差值变化率进行模糊推理,确定副级pid调节量;
6.如权利要求1所述的基于位-力-滑主副次分级的耕深控制方法,其特征在于,阻力模糊控制器以阻力与设定阻力的差值及其差值变化率为输入,输出副级pid调节量,包括副级比例系数调节量δkpf、副级积分系数调节量δkif和副级微分系数调节量δkdf,采用模糊推理控制系统构建获得;
7.如权利要求6所述的基于位-力-滑主副次分级的耕深控制方法,其特征在于,pid控制参数包括比例系数kp、积分系数ki和微分系数kd,
8.基于位-力-滑主副次分级的耕深控制系统,其特征在于,包括:
9.一种电子设备,其特征在于,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成权利要求1-7任一项所述的基于位-力-滑主副次分级的耕深控制方法的步骤。
10.一种计算机可读存储介质,其特征在于,用于存储计算机指令,所述计算机指令被处理器执行时,完成权利要求1-7任一项所述的基于位-力-滑主副次分级的耕深控制方法的步骤。
技术总结
本发明公开的基于位‑力‑滑主副次分级的耕深控制方法及系统,包括:获取拖拉机耕作过程中的实际耕深、阻力和滑转率;分别计算实际耕深与目标耕深的差值及其差值变化率、阻力与设定阻力的差值及其差值变化率,和滑转率与设定滑转率的差值及其差值变化率;对阻力与设定阻力的差值及其差值变化率进行模糊推理,确定副级PID调节量;对滑转率与设定滑转率的差值及其差值变化率进行模糊推理,确定次级PID调节量;根据实际耕深与目标耕深的差值及其差值变化率,对耕深进行PID控制,在PID控制过程中,将副级PID调节量、次级PID调节量与PID控制参数设定值相加,获得PID控制参数。保证了耕深控制的均匀性。
技术研发人员:李瑞川,吴桐,李东润,林江海,迟峰,刘淑强,徐继康,黄传真,张逸圣,袁文涛,孙祺友
受保护的技术使用者:山东省机械设计研究院
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!