一种用于船舶轨迹跟踪的非奇异快速终端滑模控制方法
本发明属于船舶运动控制领域,特别是涉及一种用于船舶轨迹跟踪的非奇异快速终端滑模控制方法。
背景技术:
1、在现有技术中,欠驱动船舶轨迹跟踪是一项重要的任务,特别是在海洋导航、救援行动、港口操作等科学研究领域。传统的控制方法对参数变化、外部扰动敏感,和船舶运动呈现出大惯性、长时滞、非线性等特点,导致轨迹跟踪控制困难。
2、在过去的几十年中,研究人员和工程师一直在探索各种控制方法来解决这些挑战。其中,滑模控制是一种广泛研究的方法,其目标是通过引入一个滑模面,将系统的状态引导到所期望的轨迹上,从而实现良好的轨迹跟踪。然而,传统的滑模控制方法通常会引入抖振、奇异性等问题。
技术实现思路
1、本发明的目的是提供一种用于船舶轨迹跟踪的非奇异快速终端滑模控制方法,以解决上述现有技术存在的问题。
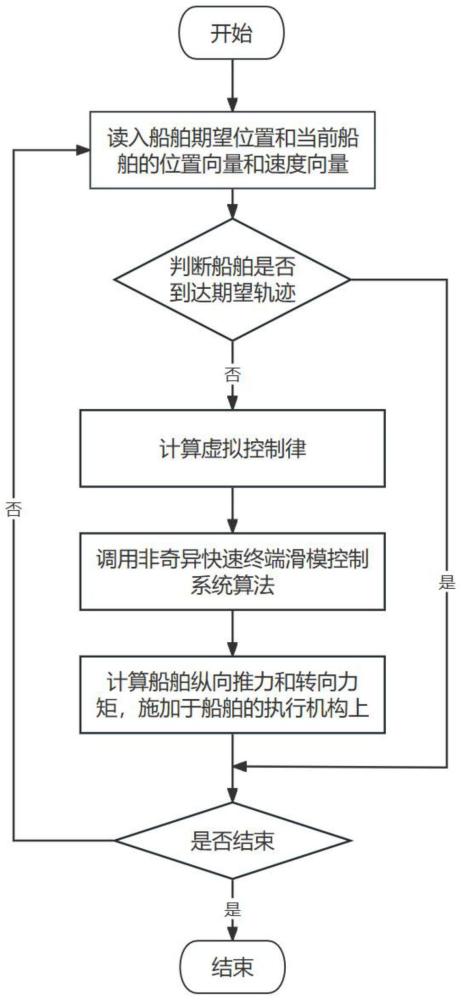
2、为实现上述目的,本发明提供了一种用于船舶轨迹跟踪的非奇异快速终端滑模控制方法,包括:
3、对欠驱动船舶进行建模,获得三自由度船舶数学模型;
4、对所述三自由度船舶数学模型进行虚拟控制率设计,获得期望速度;
5、构造非奇异快速终端滑模面,基于所述期望速度对所述非奇异快速终端滑模面进行控制。
6、所述获得三自由度船舶数学模型的过程包括:
7、基于欠驱动船舶的纵荡、横荡和艏摇三自由度运动建立欠驱动船舶惯性坐标系和随船坐标系;
8、基于所述欠驱动船舶惯性坐标系和随船坐标系构建所述三自由度船舶数学模型。
9、优选的,所述三自由度船舶数学模型的表达式为:
10、
11、其中,η=[x y ψ]t是船舶在惯性坐标系中的纵荡位移、横荡位移和艏摇角,r(ψ)是惯性坐标系和随船坐标系的转换矩阵,υ=[u v r]t是速度向量,m是船舶惯性矩阵,c(υ)是科里奥利和向心矩阵,d是水动力阻尼参数矩阵,欠驱动船舶没有侧推,即τv=0,所以τ=[τu0τr]t,τu是船舶的纵向推力,τr是船舶的转向力矩;τw=[τwu τwu τwr]t是外界环境干扰。
12、优选的,所述进行虚拟控制率设计的过程包括:
13、定义纵向和横向位置跟踪误差,将所述定义纵向和横向位置跟踪误差进行求导,基于求导结果设计随船坐标系中的纵荡速度、横荡速度的虚拟控制量,获得纵向虚拟控制律和横向虚拟控制律。
14、优选的,所述纵向虚拟控制律和横向虚拟控制律的表达式为:
15、
16、其中,xd,yd分别是期望轨迹的纵坐标和横坐标,xe,ye分别是纵向位置误差和横向位置误差,ψ为艏摇角,αu为纵向虚拟控制律,αv为横向虚拟控制律,k>0。
17、优选的,进行虚拟控制率设计的过程还包括:构造李雅普诺夫函数,对所述李雅普诺夫函数进行求导,基于求导结果对所述虚拟控制率进行稳定性验证。
18、优选的,所述构建非奇异快速终端滑模面的表达式为:
19、
20、
21、其中,s为滑模面积,a>0,b>0,0<q/p<1,ε>0,k1>0,k2>0,e为位置误差。
22、优选的,基于所述期望速度对所述非奇异快速终端滑模面进行控制的过程包括:
23、基于位置误差设计纵向和横向的虚拟控制律;
24、通过所述虚拟控制律和实际速度的误差构造所述非奇异快速终端滑模面;
25、基于所述非奇异快速终端滑模面计算出纵向推力和转向力矩。
26、本发明的技术效果为:
27、高精度轨迹跟踪:本发明的技术能够实现船舶在各种环境和操作条件下的高精度轨迹跟踪。通过引入非奇异滑模控制方法,系统可以迅速响应外部干扰和变化,确保船舶始终保持在所期望的轨迹上,从而提高了导航的准确性。
28、鲁棒性和稳定性:与传统的滑模控制方法相比,本发明的技术更具鲁棒性,能够有效处理系统非线性、不确定性和外部环境干扰。这使得船舶在不同的海洋条件下仍能保持稳定,减少了操作风险。
29、奇异性问题的解决:本发明的非奇异快速终端滑模控制技术成功解决了传统滑模控制方法中存在的奇异性问题。这意味着系统在任何状态下都能够保持可控,而不会出现数值不稳定或无法控制的情况。
30、适用性广泛:本发明的技术不仅适用于不同类型的船舶,还适用于各种环境条件,包括海洋、湖泊和河流等。这使得该技术在商业、军事和科学研究等领域都具有广泛的应用潜力。
31、降低操作成本:由于提高了船舶轨迹跟踪的精确性和稳定性,本发明有助于降低操作成本,减少了人力和资源的浪费,同时提高了运输效率。
技术特征:
1.一种用于船舶轨迹跟踪的非奇异快速终端滑模控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的用于船舶轨迹跟踪的非奇异快速终端滑模控制方法,其特征在于,所述获得三自由度船舶数学模型的过程包括:
3.根据权利要求2所述的用于船舶轨迹跟踪的非奇异快速终端滑模控制方法,其特征在于,所述三自由度船舶数学模型的表达式为:
4.根据权利要求1所述的用于船舶轨迹跟踪的非奇异快速终端滑模控制方法,其特征在于,所述进行虚拟控制率设计的过程包括:
5.根据权利要求4所述的用于船舶轨迹跟踪的非奇异快速终端滑模控制方法,其特征在于,所述纵向虚拟控制律和横向虚拟控制律的表达式为:
6.根据权利要求4所述的用于船舶轨迹跟踪的非奇异快速终端滑模控制方法,其特征在于,进行虚拟控制率设计的过程还包括:构造李雅普诺夫函数,对所述李雅普诺夫函数进行求导,基于求导结果对所述虚拟控制率进行稳定性验证。
7.根据权利要求1所述的用于船舶轨迹跟踪的非奇异快速终端滑模控制方法,其特征在于,所述构造非奇异快速终端滑模面的表达式为:
8.根据权利要求1所述的用于船舶轨迹跟踪的非奇异快速终端滑模控制方法,其特征在于,对所述非奇异快速终端滑模面进行控制的过程包括:
技术总结
本发明公开了一种用于船舶轨迹跟踪的非奇异快速终端滑模控制方法,包括:对欠驱动船舶进行建模,获得三自由度船舶数学模型;对所述三自由度船舶数学模型进行虚拟控制率设计,获得期望速度;构造非奇异快速终端滑模面,基于所述期望速度对所述非奇异快速终端滑模面进行控制。本发明的非奇异快速终端滑模控制技术成功解决了传统滑模控制方法中存在的奇异性问题。这意味着系统在任何状态下都能够保持可控,而不会出现数值不稳定或无法控制的情况。
技术研发人员:郑敏杰,苏钰涞,李定原,陈前强,王浦,陈国权,邹喆,甘婷
受保护的技术使用者:集美大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!