一种多无人机医疗联合搜救系统
本发明涉及无人机救援,尤其涉及一种多无人机医疗联合搜救系统。
背景技术:
1、无人机经过了多年的发展历程,从技术角度看已经比较成熟,其优点是成本低,具有高度灵活性,能够携带一些重要的设备从空中完成特殊任务,比如空中检测、空中监视、空中传信、空中喊话和紧急救援等。在执行特殊任务时,一般不会造成人员伤亡,生存能力强,机动性能好,实用方便,在处理自然灾害、事故灾难以及社会安全事件等方面能发挥出重要作用。
2、特别是在发生大型自然灾害,例如地震、塔防等,破坏了原有的建筑、道路和交通等,因此无法得知行进方向上的具体路况以及有无幸存者受困,而大型的救援设备及救援人员,不宜贸然进入受灾地区以避免造成二次伤害,因此在这种特殊情况下,往往需要通过无人机来对受灾场所进行初步的探查,确定受灾场所各个地方的具体情况,确定搜救方向,标记幸存者情况,从而来安排执行后续的救援路线及救援任务。
3、然而,由于在这些大型自然灾害发生时,受灾区域范围往往很大,如果使用单独的无人机来对受灾场所进行搜救的话,其搜救效率极低,且由于无人机搜救范围的限制,难以平衡搜救的精度和搜救范围,因此,有必要提供一种方案改善这一缺陷。
技术实现思路
1、本发明的目的在于提供一种多无人机医疗联合搜救系统,通过使用查探无人机群,能够快速对待搜救区域进行大规模大范围的识别,保证搜救效率,避免错过最佳救援时间,同时,查探无人机群和搜救无人机群可以同步飞行,但查探无人机群领先搜救无人机群一段距离,从而便于在扩大搜救范围的同时,同步进行精准搜救,保证了搜救精度。
2、本发明提供的一种多无人机联合搜救系统,包括相互通信连接的地面控制站、查探无人机群和搜救无人机群,且所述地面控制站用于接收待搜救人员信息并对应生成搜救图像特征及查探路径;所述查探无人机群用于沿所述查探路径进行飞行,并获取所述查探路径上的图像信息,所述地面控制站接收所述图像信息并与所述搜救图像特征进行比对后,标记与搜救图像特征匹配的探查点;所述搜救无人机群基于所述探查点生成搜救路径,并沿所述搜救路径进行低空飞行,并对所述探查点进行生命识别探查。
3、本发明提供的一种多无人机医疗联合搜救系统的有益效果在于,通过使用查探无人机群,能够快速对待搜救区域进行大规模大范围的识别,保证搜救效率,避免错过最佳救援时间,同时,查探无人机群和搜救无人机群可以同步飞行,但查探无人机群领先搜救无人机群一段距离,从而便于在扩大搜救范围的同时,同步进行精准搜救,保证了搜救精度。
4、一种可能的实施例中,所述地面控制站包括特征搜救模块和知识库,所述知识库用于接收待搜救人员信息并匹配生成所述搜救图像特征,所述特征搜救模块用于接收所述图像信息并对所述探查点进行标记。
5、一种可能的实施例中,所述查探无人机群包括图像查探模块和地图构建模块,所述查探模块用于获取所述查探路径上的图像信息,并将所述图像信息发送至所述地面控制站,所述地图构建模块用于沿所述查探路径进行图像构建获得场地信息。
6、一种可能的实施例中,所述搜救无人机群还包括区域重构模块,所述区域重构模块用于根据所述场地信息生成建筑重构模型,并根据所述建筑重构模型标记坍塌点。
7、一种可能的实施例中,所述场地信息包括建筑碎片分布信息、家用特征物分布信息和障碍物信息。
8、一种可能的实施例中,所述搜救无人机群包括搜救识别模块和路径规划模块,所述搜救识别模块用于对所述探查点进行生命识别,所述路径规划模块用于根据所述探查点及所述场地信息规划生成所述搜救路径。
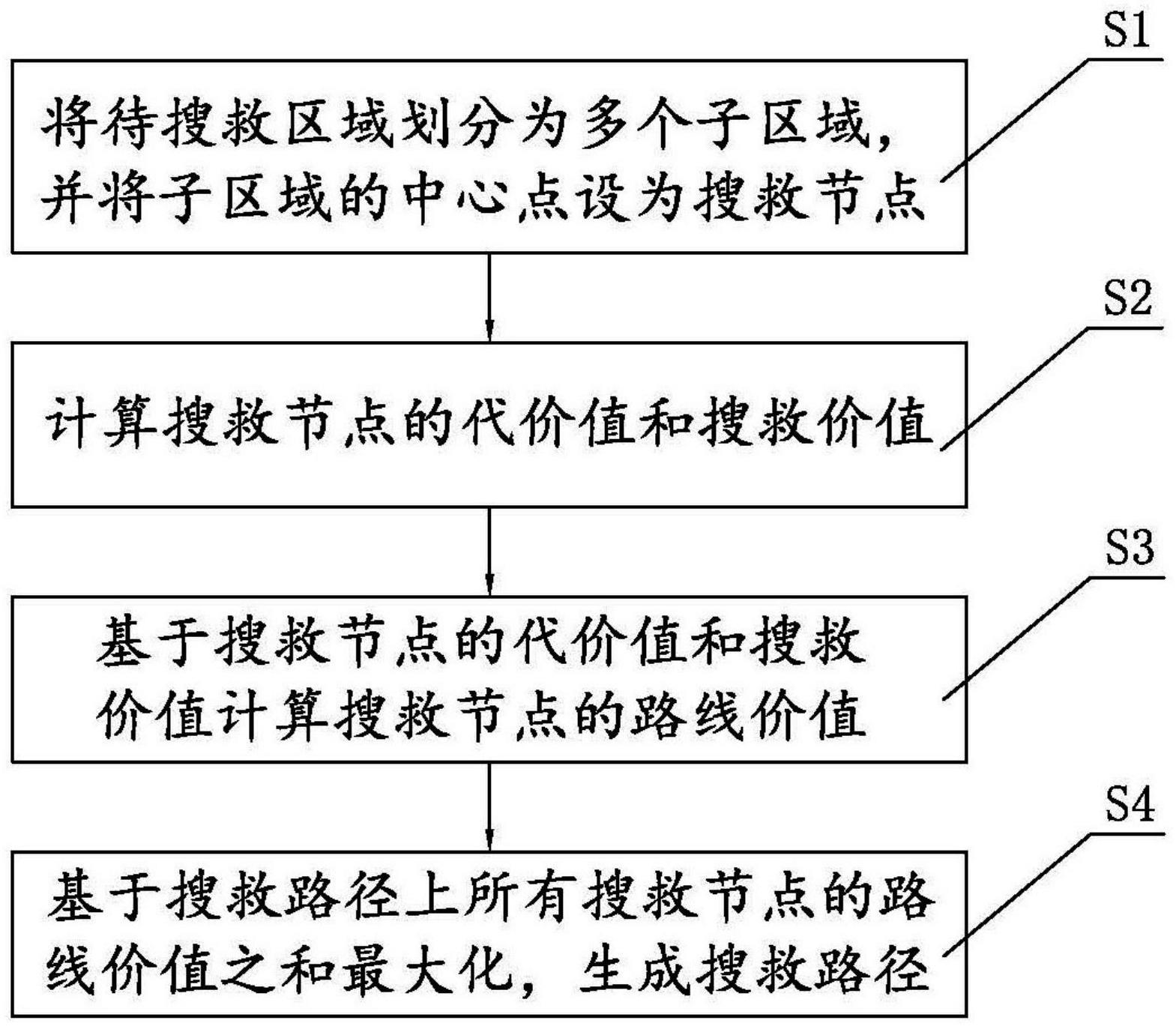
9、一种可能的实施例中,所述路径规划模块根据所述探查点及所述场地信息规划生成所述搜救路径的过程中,包括:
10、将待搜救区域划分为多个子区域,并将所述子区域的中心点设为搜救节点;
11、计算所述搜救节点的代价值和搜救价值;所述代价值包括航程代价值和障碍物威胁代价值;
12、基于所述搜救节点的代价值和搜救价值计算所述搜救节点的路线价值;
13、基于搜救路径上所有所述搜救节点的路线价值之和最大化,生成搜救路径
14、一种可能的实施例中,计算所述搜救节点的代价值时,所述代价值的计算公式如下所示:
15、ki=kidistance+kiobstacle;
16、其中,ki为第i个搜救节点的代价值,kidistance为第i个搜救节点的航程代价值,kiobstacle为第i个搜救节点的障碍物威胁代价值;
17、所述kidistance的计算公式如下所示:
18、
19、其中,为当前无人机位置至第i个搜救节点的距离,为当前无人机的剩余续航里程,α1为第一预设权重,α2为第二预设权重;所述当前无人机为待对第个搜救节点进行搜救的无人机;
20、所述kiobstacle的计算公式如下所示:
21、
22、其中,为当前无人机距离其他无人机的最短距离,为静态障碍物威胁代价值动态函数,α3为第三预设权重,α4为第四预设权重。
23、一种可能的实施例中,所述静态障碍物威胁代价值动态函数的计算公式如下所示:
24、
25、其中,ri为第i个搜救节点的基础威胁代价值,k为威胁代价权重,ssafe为当前无人机距离静态障碍物的安全距离,r为预设安全阈值。
26、一种可能的实施例中,计算所述搜救节点的公式如下所示:
27、yi=∑x=1,...,m(α5×βx×γx);
28、其中,yi为第i个搜救节点的搜救价值,x表示第1至m个特征物的编号,α5为第五预设权重,βx表示第x个特征物的特征权重,γx表示第x个特征物与搜救图像特征的相似值。
技术特征:
1.一种多无人机医疗联合搜救系统,其特征在于,包括相互通信连接的地面控制站、查探无人机群和搜救无人机群,且所述地面控制站用于接收待搜救人员信息并对应生成搜救图像特征及查探路径;所述查探无人机群用于沿所述查探路径进行飞行,并获取所述查探路径上的图像信息,所述地面控制站接收所述图像信息并与所述搜救图像特征进行比对后,标记与搜救图像特征匹配的探查点;所述搜救无人机群基于所述探查点生成搜救路径,并沿所述搜救路径进行低空飞行,并对所述探查点进行生命识别探查。
2.根据权利要求1所述的搜救系统,其特征在于,所述地面控制站包括特征搜救模块和知识库,所述知识库用于接收待搜救人员信息并匹配生成所述搜救
3.根据权利要求1所述的搜救系统,其特征在于,所述查探无人机群包括图像查探模块和地图构建模块,所述查探模块用于获取所述查探路径上的图像信息,并将所述图像信息发送至所述地面控制站,所述地图构建模块用于沿所述查探路径进行图像构建获得场地信息。
4.根据权利要求3所述的搜救系统,其特征在于,所述搜救无人机群还包括区域重构模块,所述区域重构模块用于根据所述场地信息生成建筑重构模型,并根据所述建筑重构模型标记坍塌点。
5.根据权利要求4所述的搜救系统,其特征在于,所述场地信息包括建筑碎片分布信息、家用特征物分布信息和障碍物信息。
6.根据权利要求5所述的搜救系统,其特征在于,所述搜救无人机群包括搜救识别模块和路径规划模块,所述搜救识别模块用于对所述探查点进行生命识别,所述路径规划模块用于根据所述探查点及所述场地信息规划生成所述搜救路径。
7.根据权利要求6所述的搜救系统,其特征在于,所述路径规划模块根据所述探查点及所述场地信息规划生成所述搜救路径的过程中,包括:
8.根据权利要求7所述的搜救系统,其特征在于,计算所述搜救节点的代价值时,所述代价值的计算公式如下所示:
9.根据权利要求8所述的搜救系统,其特征在于,所述静态障碍物威胁代价值动态函数的计算公式如下所示:
10.根据权利要求7所述的搜救系统,其特征在于,计算所述搜救节点的公式如下所示:
技术总结
本发明提供了一种多无人机医疗联合搜救系统,涉及无人机救援技术领域,包括相互通信连接的地面控制站、查探无人机群和搜救无人机群,且所述地面控制站用于接收待搜救人员信息并对应生成搜救图像特征及查探路径;所述查探无人机群用于沿所述查探路径进行飞行,并获取所述查探路径上的图像信息,所述地面控制站接收所述图像信息并与所述搜救图像特征进行比对后,标记与搜救图像特征匹配的探查点;所述搜救无人机群基于所述探查点生成搜救路径,并沿所述搜救路径进行低空飞行,并对所述探查点进行生命识别探查。本发明在扩大搜救范围的同时,同步进行精准搜救,保证了搜救精度。
技术研发人员:刘昱辰,李勇,黄璇
受保护的技术使用者:南昌大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!