一种自动驾驶绕行方法、装置、设备及存储介质与流程
本发明涉及自动驾驶技术,尤其涉及一种自动驾驶绕行方法、装置、设备及存储介质。
背景技术:
1、随着通信、控制以及网络技术的不断发展,追求驾驶安全性、舒适性以及自动化的自动驾驶技术开始广泛应用于车辆控制技术中,具备自动驾驶技术的车辆也开始逐渐在社会上普及开来。
2、以目前的一种自动驾驶方案为例,自动驾驶车辆在行进过程中检测到障碍物后,生成对应的障碍物模型,并在障碍物模型边缘添加一个具有预设宽度的不可穿越区域,然后基于该不可穿越区域优化出规划运行轨迹,然后自动驾驶车辆依据该规划运行轨迹行进以绕过障碍物;规划运行轨迹不会穿过不可穿越区域,从而保证自动驾驶车辆在绕过障碍物的过程中不与障碍物发生碰撞。
3、但是,自动驾驶车辆按照规划运行轨迹以不穿过不可穿越区域的方式绕行障碍物时,比较容易出现识别不稳定的问题,如识别出的障碍物出现边界跳动的问题,以及识别出的空间小导致自动驾驶车辆无法通行的问题,且自动驾驶车辆在垂直其行进方向的方向上会在短时间内容易产生较大的位移,如此会降低自动驾驶车辆绕行障碍物时的舒适性与安全性。
技术实现思路
1、本发明实施例提供一种自动驾驶绕行方法、装置、设备及存储介质。
2、第一方面,本申请提供一种自动驾驶绕行方法,包括:
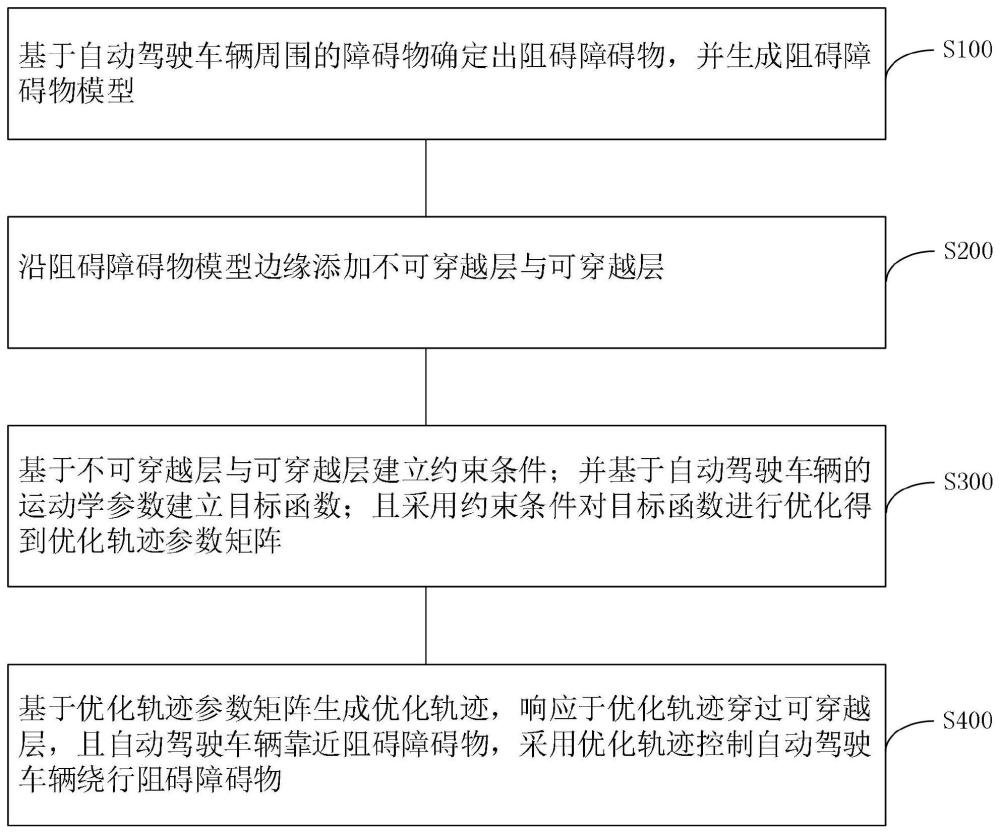
3、基于自动驾驶车辆周围的障碍物确定出阻碍障碍物,并生成阻碍障碍物模型;
4、沿所述阻碍障碍物模型边缘添加不可穿越层与可穿越层;
5、基于所述不可穿越层与所述可穿越层建立约束条件;并基于所述自动驾驶车辆的运动学参数建立目标函数;且采用所述约束条件对所述目标函数进行优化得到优化轨迹参数矩阵;
6、基于所述优化轨迹参数矩阵生成优化轨迹,响应于所述优化轨迹穿过所述可穿越层,且所述自动驾驶车辆靠近所述阻碍障碍物,采用所述优化轨迹控制所述自动驾驶车辆绕行所述阻碍障碍物。
7、在一个具体的可实施方案中,基于自动驾驶车辆周围的障碍物确定出阻碍障碍物的步骤包括:
8、获取每种所述障碍物的障碍物速度,判断每种所述障碍物速度是否低于对应的障碍物速度阈值,若是,将所述障碍物判断为静态障碍物;否则将所述障碍物判断为动态障碍物;
9、基于所述自动驾驶车辆的参考线对所述静态障碍物与所述动态障碍物进行判断,确定出所述阻碍障碍物。
10、在一个具体的可实施方案中,所述基于所述自动驾驶车辆的参考线对所述静态障碍物与所述动态障碍物进行判断,确定出所述阻碍障碍物的步骤包括:
11、连续至少两个第一识别周期判断所述静态障碍物或所述动态障碍物是否均存在,若是,将对应的所述静态障碍物或所述动态障碍物判断为实存障碍物;
12、连续至少两个第二识别周期判断所述实存障碍物是否均存在于所述参考线上,若是,将所述实存障碍物判断为所述阻碍障碍物。
13、在一个具体的可实施方案中,所述沿所述阻碍障碍物模型边缘添加不可穿越层与可穿越层的步骤包括:
14、基于所述阻碍障碍物模型与道路边界信息生成备选路线;
15、依据预设的不可穿越层宽度阈值在所述阻碍障碍物模型靠近所述备选路线的一侧添加所述不可穿越层;
16、在所述不可穿越层远离所述阻碍障碍物模型的一侧添加所述可穿越层。
17、在一个具体的可实施方案中,建立所述约束条件还基于所述自动驾驶车辆的所述运动学参数与道路边界信息;所述运动学参数至少包括所述自动驾驶车辆的横向位置信息;建立所述目标函数还基于所述运动学参数、车辆原行驶车道中心线以及参考线。
18、在一个具体的可实施方案中,基于所述优化轨迹参数矩阵判断所述优化轨迹是否穿过所述可穿越层的步骤包括:
19、依据所述优化轨迹参数矩阵获取对应的优化轨迹点,并依据所述优化轨迹点生成对应的优化轨迹;
20、判断与所述优化轨迹对应的所述优化轨迹点是否存在于所述可穿越层中。
21、在一个具体的可实施方案中,判断所述自动驾驶车辆是否靠近所述阻碍障碍物的步骤包括:
22、获取所述可穿越层中在纵向上最靠近所述自动驾驶车辆的所述优化轨迹点,记为最近轨迹点;
23、计算所述优化轨迹的起点与所述最近轨迹点之间的距离,记为靠近距离;
24、基于所述自动驾驶车辆的当前速度、减速度、期望行驶速度生成距离阈值;其中,所述期望行驶速度为所述最近轨迹点沿横向进入所述可穿越层的距离的函数;
25、根据所述靠近距离与所述距离阈值,判断所述自动驾驶车辆是否靠近所述阻碍障碍物。
26、第二方面,本申请还提供一种自动驾驶绕行装置,包括:
27、模型生成模块,用于基于自动驾驶车辆周围的障碍物确定出阻碍障碍物,并生成阻碍障碍物模型;
28、添层模块,用于沿所述阻碍障碍物模型边缘添加不可穿越层与可穿越层;
29、矩阵计算模块,用于基于所述不可穿越层与所述可穿越层建立约束条件;并基于所述自动驾驶车辆的运动学参数建立目标函数;且采用所述约束条件对所述目标函数进行优化得到优化轨迹参数矩阵;
30、绕行控制模块,用于基于所述优化轨迹参数矩阵生成优化轨迹,响应于所述优化轨迹穿过所述可穿越层,且所述自动驾驶车辆靠近所述阻碍障碍物,采用所述优化轨迹控制所述自动驾驶车辆绕行所述阻碍障碍物。
31、第三方面,本申请还提供一种计算机设备,采用如下技术方案,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,使得处理器加载并执行上述任意一种的自动驾驶绕行方法。
32、第四方面,本申请还提供一种计算机可读存储介质,采用如下技术方案,存储有能够被处理器加载并执行上述任意一种自动驾驶绕行方法的计算机程序。
技术特征:
1.一种自动驾驶绕行方法,其特征在于,包括:
2.根据权利要求1所述的一种自动驾驶绕行方法,其特征在于,基于自动驾驶车辆周围的障碍物确定出阻碍障碍物的步骤包括:
3.根据权利要求2所述的一种自动驾驶绕行方法,其特征在于,所述基于所述自动驾驶车辆的参考线对所述静态障碍物与所述动态障碍物进行判断,确定出所述阻碍障碍物的步骤包括:
4.根据权利要求1所述的一种自动驾驶绕行方法,其特征在于,所述沿所述阻碍障碍物模型边缘添加不可穿越层与可穿越层的步骤包括:
5.根据权利要求1所述的一种自动驾驶绕行方法,其特征在于,建立所述约束条件还基于所述自动驾驶车辆的所述运动学参数与道路边界信息;所述运动学参数至少包括所述自动驾驶车辆的横向位置信息;建立所述目标函数还基于所述运动学参数、车辆原行驶车道中心线以及参考线。
6.根据权利要求1所述的一种自动驾驶绕行方法,其特征在于,基于所述优化轨迹参数矩阵判断所述优化轨迹是否穿过所述可穿越层的步骤包括:
7.根据权利要求6所述的一种自动驾驶绕行方法,其特征在于,判断所述自动驾驶车辆是否靠近所述阻碍障碍物的步骤包括:
8.一种自动驾驶绕行装置,其特征在于,包括:
9.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,处理器执行程序时实现如权利要求1-7中任一种所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一种所述的方法。
技术总结
本发明涉及自动驾驶技术,尤其涉及一种自动驾驶绕行方法、装置、设备及存储介质,其中方法包括:基于自动驾驶车辆周围的障碍物确定出阻碍障碍物,并生成阻碍障碍物模型;沿阻碍障碍物模型边缘添加不可穿越层与可穿越层;基于不可穿越层与可穿越层建立约束条件;并基于自动驾驶车辆的运动学参数建立目标函数;且采用约束条件对目标函数进行优化得到优化轨迹参数矩阵;基于优化轨迹参数矩阵生成优化轨迹,响应于优化轨迹穿过可穿越层,且自动驾驶车辆靠近阻碍障碍物,采用优化轨迹控制自动驾驶车辆绕行阻碍障碍物,本发明便于提升自动驾驶车辆绕行障碍物时的舒适性与安全性。
技术研发人员:陈威池,尚秉旭,陈志新,王洪峰,张勇,邱云海,徐华键
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!