一种基于前馈模型预测控制的路径跟踪控制方法及系统
本发明涉及无人驾驶车辆、移动机器人的运动控制,尤其涉及一种基于前馈模型预测控制的路径跟踪控制方法及系统。
背景技术:
1、在现有路径跟踪控制方法中,模型预测控制之外的控制方法均难以有效处理系统约束的影响,因此难以在前轮转角约束、前轮转角速度约束等系统约束的影响下实现高精度的路径跟踪控制。而在模型预测控制方法中,非线性模型预测控制具有能够有效利用前方参考路径信息的优势,精确性较高,但是其实时性较差,难以在计算能力较低的硬件平台上部署实施。线性模型预测控制的实时性较好,但大多研究成果均采用没有预瞄点的控制框架,无法在参考路径曲率幅度较大且曲率变化较快的工况下实现高精度的路径跟踪控制。
2、总而言之,目前缺乏同时具有能够有效处理系统约束影响、能够有效利用前方参考路径信息、具有较好的实时性等三种优势的路径跟踪控制方法。
技术实现思路
1、本发明提供了一种基于前馈模型预测控制的路径跟踪控制方法及系统,解决现有技术中缺乏同时具有能够有效处理系统约束影响、能够有效利用前方参考路径信息、具有较好的实时性等三种优势的路径跟踪控制方法的问题。
2、为解决上述发明目的,本发明提供的技术方案如下:一种基于前馈模型预测控制的路径跟踪控制方法,其特征在于,步骤包括:
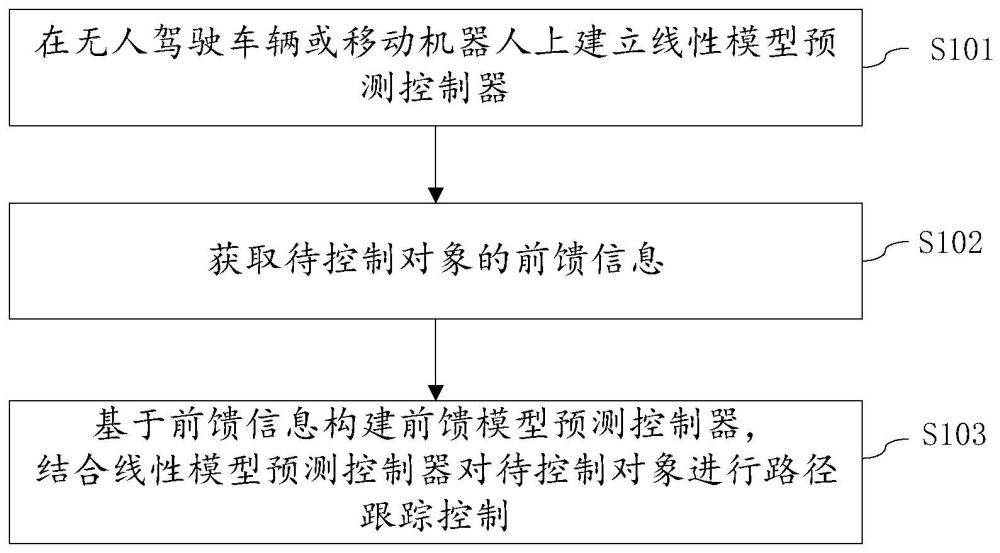
3、s1、在无人驾驶车辆或移动机器人上建立线性模型预测控制器;
4、s2、获取无人驾驶车辆或移动机器人的前馈信息;
5、s3、基于前馈信息构建前馈模型预测控制器,结合线性模型预测控制器对无人驾驶车辆或移动机器人进行路径跟踪控制。
6、优选地,步骤s1中,在无人驾驶车辆或移动机器人上建立线性模型预测控制器,包括:
7、获取无人驾驶车辆或移动机器人的运动学模型或动力学模型;
8、基于运动学模型或动力学模型,获得控制对象的差分状态预测模型;
9、预设线性优化函数,将线性优化函数代入差分状态预测模型,获得线性控制标准二次型,建立线性模型预测控制器。
10、优选地,线性控制标准二次型包括:
11、
12、其中,t为时刻,j为优化目标函数;为输入增量矩阵;h为二次项矩阵;g为一次项矩阵。
13、优选地,步骤s2中,获取无人驾驶车辆或移动机器人的前馈信息,包括:
14、获取无人驾驶车辆或移动机器人的参考路径信息;参考路径信息,包括:无人驾驶车辆或移动机器人每个参考路径点的曲率信息;
15、基于参考路径信息进行前馈前轮转角计算。
16、优选地,将基于参考路径信息进行前馈前轮转角计算,包括:
17、获取曲率信息;
18、基于曲率信息计算前馈前轮转角;将曲率信息所在的参考路径点设为预瞄点;获取每个预瞄点之间的距离。
19、优选地,步骤s3中,基于前馈信息构建前馈模型预测控制器,包括:
20、获取前馈信息;
21、基于前馈信息,采用运动学模型或动力学模型,构建前馈模型预测控制器。
22、优选地,步骤s3中,基于前馈信息,采用运动学模型或动力学模型,构建前馈模型预测控制器,包括:
23、基于预瞄点处的曲率信息,通过前馈前轮转角表示前馈控制输入;
24、预设前馈优化目标函数,将前馈控制输入带入前馈优化目标函数,获得前馈控制标准二次型,构建前馈模型预测控制器。
25、优选地,前馈控制标准二次型包括:
26、
27、优选地,步骤s3中,结合线性模型预测控制器对无人驾驶车辆或移动机器人进行路径跟踪控制,包括:
28、获取线性控制标准二次型以及前馈控制标准二次型;
29、如下述公式(3)所示合并线性控制标准二次型以及前馈控制标准二次型的同类项:
30、
31、其中:
32、加入系统约束,获得如下述公式(4)的有约束的优化目标函数;
33、
34、求解有约束的优化目标函数;取求解获得的控制输入序列中的第一个值作为实际控制输入,完成基于前馈模型预测控制的路径跟踪控制。
35、一种基于前馈模型预测控制的路径跟踪控制系统,系统用于上述的基于前馈模型预测控制的路径跟踪控制方法,系统包括:
36、线性控制构建模块,用于在无人驾驶车辆或移动机器人上建立线性模型预测控制器;
37、信息获取模块,获取无人驾驶车辆或移动机器人的前馈信息;
38、路径跟踪控制模块,用于基于所述前馈信息构建前馈模型预测控制器,结合所述线性模型预测控制器对所述无人驾驶车辆或移动机器人进行路径跟踪控制。
39、一方面,提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现上述基于前馈模型预测控制的路径跟踪控制方法。
40、一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述基于前馈模型预测控制的路径跟踪控制方法。
41、上述技术方案,与现有技术相比至少具有如下有益效果:
42、上述方案,本发明通过引入前馈信息,可以解决缺乏同时具有能够有效处理系统约束影响、能够有效利用前方参考路径信息、具有较好的实时性等三种优势的路径跟踪控制方法的问题,即解决现有路径跟踪控制方法存在不能有效处理系统约束影响、不能有效利用前方参考路径信息或实时性较差等问题。
技术特征:
1.一种基于前馈模型预测控制的路径跟踪控制方法,其特征在于,方法步骤包括:
2.根据权利要求1所述的方法,其特征在于,所述步骤s1中,在无人驾驶车辆或移动机器人上建立线性模型预测控制器,包括:
3.根据权利要求2所述的方法,其特征在于,所述线性控制标准二次型包括:
4.根据权利要求3所述的方法,其特征在于,所述步骤s2中,获取无人驾驶车辆或移动机器人的前馈信息,包括:
5.根据权利要求4所述的方法,其特征在于,所述将基于所述参考路径信息进行前馈前轮转角计算,包括:
6.根据权利要求5所述的方法,其特征在于,所述步骤s3中,基于所述前馈信息构建前馈模型预测控制器,包括:
7.根据权利要求8所述的方法,其特征在于,所述基于所述前馈信息,采用运动学模型或动力学模型,构建前馈模型预测控制器,包括:
8.根据权利要求7所述的方法,其特征在于,所述前馈控制标准二次型包括:
9.根据权利要求8所述的方法,其特征在于,所述步骤s3中,结合所述线性模型预测控制器对所述无人驾驶车辆或移动机器人进行路径跟踪控制,包括:
10.一种基于前馈模型预测控制的路径跟踪控制系统,其特征在于,所述系统用于如权利要求1~9任意一项所述的基于前馈模型预测控制的路径跟踪控制方法,所述系统包括:
技术总结
本发明提供一种基于前馈模型预测控制的路径跟踪控制方法及系统,涉及无人驾驶车辆、移动机器人的运动控制技术领域,包括:在无人驾驶车辆或移动机器人上建立线性模型预测控制器;获取无人驾驶车辆或移动机器人的前馈信息;基于前馈信息构建前馈模型预测控制器,结合线性模型预测控制器对无人驾驶车辆或移动机器人进行路径跟踪控制。通过引入前馈信息,可以解决缺乏同时具有能够有效处理系统约束影响、能够有效利用前方参考路径信息、具有较好的实时性等三种优势的路径跟踪控制方法的问题,即解决现有路径跟踪控制方法存在不能有效处理系统约束影响、不能有效利用前方参考路径信息或实时性较差等问题。
技术研发人员:白国星,孟宇,刘立,顾青,伊力夏提·伊力哈木江,常鑫睿
受保护的技术使用者:北京科技大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!