吸附式飞行机器人通信控制方法、系统及存储介质
本发明涉及桥梁检测,具体是涉及一种吸附式飞行机器人通信控制方法、系统及存储介质。
背景技术:
1、桥梁作为基础交通和城市基础设施的重要组成部分,其安全性和稳定性对于公众的生命和财产安全具有至关重要的意义。然而,随着桥梁使用年限的增长和外部环境的影响,桥梁可能会出现腐蚀、裂缝、变形等问题,导致结构的损坏和疲劳。为了确保桥梁的安全运行,定期的检测和维护变得不可或缺。
2、传统的桥梁检测方法通常需要在接近桥梁的情况下进行,这可能涉及到高空作业、悬崖陡壁等危险环境,存在人员安全风险。而且,传统方法可能需要耗费大量时间和人力资源,且在一些情况下难以获得准确和详尽的检测数据。
技术实现思路
1、(一)要解决的技术问题
2、本发明主要针对以上问题,提出了一种吸附式飞行机器人通信控制方法、系统及存储介质,其目的是解决传统桥梁检测方法存在的危险、耗时和数据不准确等问题。
3、(二)技术方案
4、为实现上述目的,本发明第一方面提供了一种吸附式飞行机器人通信控制方法,该方法包括如下步骤:
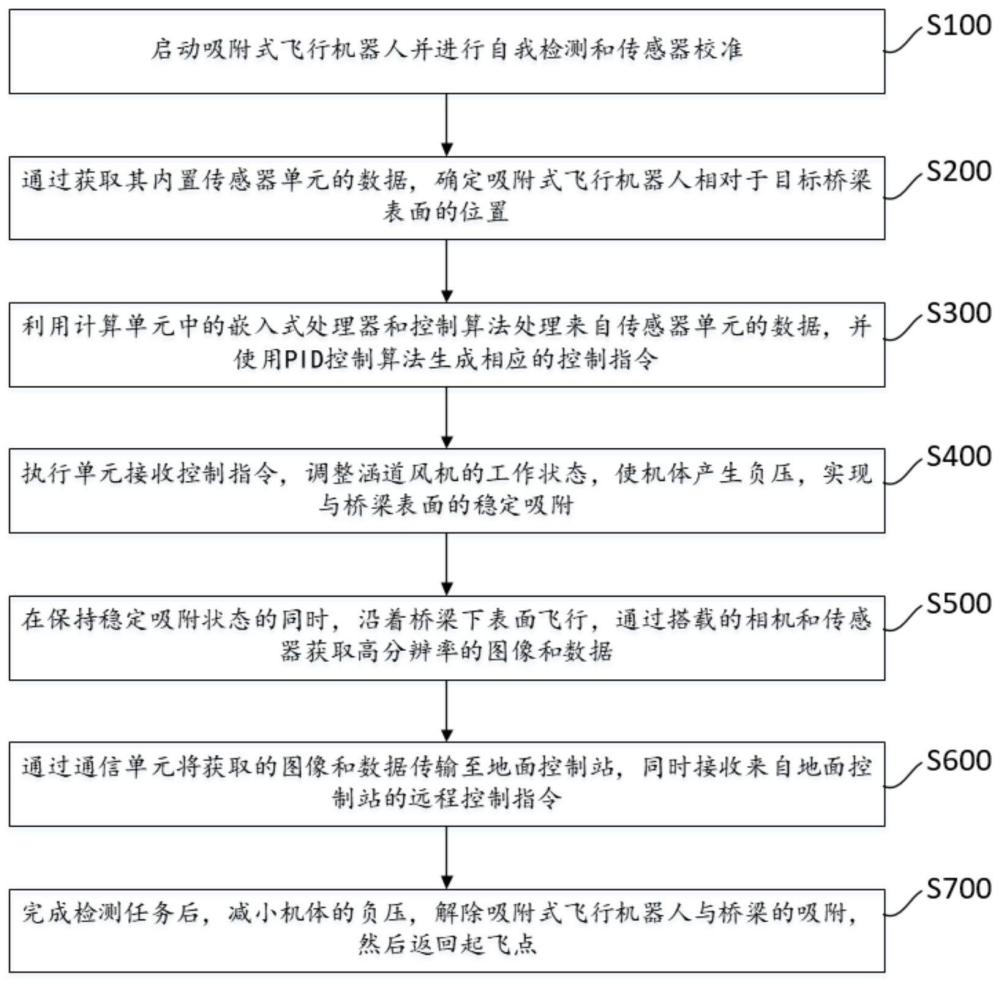
5、s100、启动吸附式飞行机器人并进行自我检测和传感器校准;
6、s200、通过获取其内置传感器单元的数据,确定吸附式飞行机器人相对于目标桥梁表面的位置;
7、s300、利用计算单元中的嵌入式处理器和控制算法处理来自传感器单元的数据,并使用pid控制算法生成相应的控制指令;
8、s400、执行单元接收控制指令,调整涵道风机的工作状态,使机体产生负压,实现与桥梁表面的稳定吸附;
9、s500、在保持稳定吸附状态的同时,沿着桥梁下表面飞行,通过搭载的相机和传感器获取高分辨率的图像和数据;
10、s600、通过通信单元将获取的图像和数据传输至地面控制站,同时接收来自地面控制站的远程控制指令;
11、s700、完成检测任务后,减小机体的负压,解除吸附式飞行机器人与桥梁的吸附,然后返回起飞点。
12、进一步地,在步骤s100中,自我检测和传感器校准包括对惯性测量单元、光流传感器、气压传感器设备的状态进行检查,并进行必要的校准。
13、进一步地,在步骤s200中,确定吸附式飞行机器人相对于目标桥梁表面的位置的步骤包括:
14、s201、吸附式飞行机器人起飞后,启动其内置的惯性测量单元、光流传感器和气压传感器;
15、s202、惯性测量单元提供吸附式飞行机器人的实时姿态数据,包括滚动角、俯仰角和偏航角;
16、s203、光流传感器通过检测图像序列中的像素位移,计算并提供吸附式飞行机器人在水平方向上的移动速度;
17、s204、气压传感器测量周围大气压力,并将其转换为高度信息;
18、s205、根据得到的所述滚动角、俯仰角、偏航角、移动速度及高度信息,确定飞行机器人当前的三维空间位置,即相对于目标桥梁表面的位置。
19、进一步地,在步骤s300中,使用p id控制算法生成控制指令的步骤包括:
20、s301、计算单元接收来自传感器单元的实时位置和姿态数据;
21、s302、用所述实时位置和姿态数据计算出飞行机器人当前位置与目标位置之间的偏差值,以及偏差值的微分值和积分值;
22、s303、根据p id控制算法,通过调整比例、积分、微分参数,将上述三个元素进行加权相加,生成相应的控制指令。
23、进一步地,实现与桥梁表面的稳定吸附还包括如下步骤:
24、使用气压传感器对吸附式飞行机器人产生的负压值进行实时监控,并收集负压变化情况;
25、将实时采集的负压值与预设阈值进行比较;
26、当负压值低于预设阈值一时,启动预警模块,发送可能发生脱落的警告;
27、若负压值继续降低至低于预设阈值二,启动负压调节系统;
28、将负压值、负压变化情况及脱落警告信息传输至用户界面。
29、进一步地,其中,负压调节系统包括以下步骤:
30、使用激光雷达测量吸附式飞行机器人与壁面的距离;
31、根据测得的距离调整电机转速,改变吸附式飞行机器人对壁面的吸附力;
32、当吸附式飞行机器人对壁面的吸附力稳定后,提高电机转速,增加吸附力,使负压值重新升至预设阈值一或预设阀值二以上。
33、进一步地,调整电机转速的增量δr依据以下公式进行;
34、δr=kp*δh+ki*∫δh+kd*δh
35、r为电机转速,δh为距墙面距离,单位mm,kp为比例系数,ki为积分系数,kd为微分系数;
36、所述比例系数kp在10~100,积分系数ki数量级在1~10,用于消除稳态误差,微分系数kd数量级在0.1~1,用于增加稳定性;各系数具体数值根据吸附式飞行机器人螺旋桨的数据特性调整。
37、为实现上述目的,本发明第二方面提供了一种吸附式飞行机器人的通信控制系统,该系统包括:
38、初始化单元,用于启动吸附式飞行机器人并进行自我检测和传感器校准;
39、定位单元,通过使用内置传感器单元获取数据,确定吸附式飞行机器人相对于目标桥梁表面的位置;
40、计算单元,其中的嵌入式处理器和控制算法处理从传感器单元获得的数据,使用pid控制算法生成相应的控制指令;
41、执行单元,接收控制指令,调整涵道风机的工作状态,使机体产生负压,实现与桥梁表面的稳定吸附;
42、检测单元,保持稳定吸附状态的同时,沿着桥梁下表面飞行,通过相机和传感器获取高分辨率的图像和数据;
43、通信单元,将获取的图像和数据传输至地面控制站,同时接收来自地面控制站的远程控制指令;
44、返航单元,完成检测任务后,减小机体的负压,解除与桥梁表面的吸附,然后返回起飞点。
45、为实现上述目的,本发明第三方面提供了一种非易失性存储介质,其上存储有用于执行吸附式飞行机器人通信控制方法的计算机程序指令。
46、(三)有益效果
47、与现有技术相比,本发明提供的一种吸附式飞行机器人通信控制方法、系统及存储介质,通过搭载传感器、相机和其他检测设备以及负压吸附装置,解决了传统桥梁检测方法存在的高风险、耗时、人力资源消耗大以及难以获取准确数据等问题。该方法实现了吸附式飞行机器人在桥梁下表面的稳定飞行,通过传感器单元获取实时数据,计算单元使用pid算法生成控制指令,执行单元调节负压吸附装置以实现与桥梁表面的稳定吸附,该方法提高了桥梁检测的效率和安全性。
技术特征:
1.一种吸附式飞行机器人通信控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种吸附式飞行机器人通信控制方法,其特征在于,在步骤s100中,自我检测和传感器校准包括对惯性测量单元、光流传感器、气压传感器设备的状态进行检查,并进行必要的校准。
3.如权利要求2所述的一种吸附式飞行机器人通信控制方法,其特征在于,在步骤s200中,确定吸附式飞行机器人相对于目标桥梁表面的位置的步骤包括:
4.如权利要求1所述的一种吸附式飞行机器人通信控制方法,其特征在于,在步骤s300中,使用pid控制算法生成控制指令的步骤包括:
5.如权利要求1所述的一种吸附式飞行机器人通信控制方法,其特征在于,实现与桥梁表面的稳定吸附还包括如下步骤:
6.如权利要求5所述的一种吸附式飞行机器人通信控制方法,其特征在于,其中,负压调节系统包括以下步骤:
7.如权利要求6所述的一种吸附式飞行机器人通信控制方法,其特征在于,调整电机转速的增量δr依据以下公式进行;
8.一种吸附式飞行机器人的通信控制系统,其特征在于,该系统包括:
9.一种非易失性存储介质,其特征在于,其上存储有用于执行权利要求1中吸附式飞行机器人通信控制方法的计算机程序指令。
技术总结
本发明涉及桥梁检测技术领域,具体是涉及一种吸附式飞行机器人通信控制方法、系统及存储介质。该方法包括启动吸附式飞行机器人,通过传感器获取位置信息,并使用PID控制算法生成控制指令。执行单元调节涵道风机产生负压,实现与桥梁表面的稳定吸附。机器人沿桥梁下表面飞行,获取高分辨率图像和数据。通过通信单元传输数据至地面控制站,接收远程控制指令。完成任务后解除吸附并返回起飞点。该方法提高了桥梁检测效率和安全性。
技术研发人员:刘兴超,杨大伟,王涛,解峥,潘丹
受保护的技术使用者:哈尔滨工业大学重庆研究院
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!