无人机飞行高度控制方法、装置、电子设备及存储介质
本发明涉及农业,尤其涉及一种无人机飞行高度控制方法、装置、电子设备及存储介质。
背景技术:
1、植保无人机具有地形适应性广、作业效率高等特点,近年在我国发展迅速,已经成为农林病虫害防控的重要机具。植保无人机飞行高度对施药质量的影响较大,飞行过高,容易导致药液飘失,降低农药利用率,引起农药污染次生灾害;飞行过低,容易因植保无人机下洗气流引起作物冠层破坏。因此,植保无人机作业时的最佳飞行高度决策至关重要。
2、目前,无人机飞行高度主要是基于飞行安全需求,采用高度计、超声波传感器、激光雷达等方式测量无人机与作物冠层之间的距离。然而,上述现有的高度测量方式只能测量出无人机与作物的相对距离,并不能反映出当前的飞行高度是否合理,导致施药效果并不理想。
3、因此,在植保无人机施药过程中,如何更好地控制无人机的飞行高度,提升无人机施药效果已经成为业界亟待解决的技术问题。
技术实现思路
1、本发明提供一种无人机飞行高度控制方法、装置、电子设备及存储介质,用以在植保无人机施药过程中,更好地控制无人机的飞行高度,提升无人机施药效果。
2、本发明提供一种无人机飞行高度控制方法,包括:
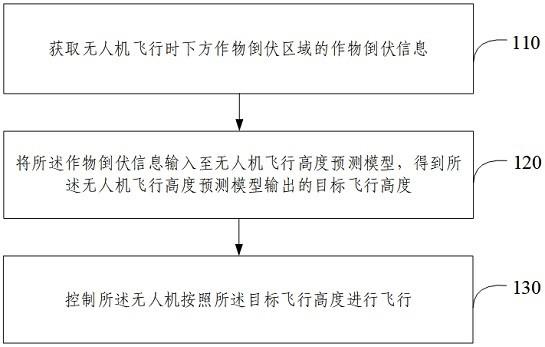
3、获取无人机飞行时下方作物倒伏区域的作物倒伏信息;
4、将所述作物倒伏信息输入至无人机飞行高度预测模型,得到所述无人机飞行高度预测模型输出的目标飞行高度;所述无人机飞行高度预测模型是根据作物倒伏信息样本及其对应的无人机飞行高度标签进行训练得到的;
5、控制所述无人机按照所述目标飞行高度进行飞行。
6、根据本发明提供的一种无人机飞行高度控制方法,在所述获取无人机飞行时下方作物倒伏区域的作物倒伏信息之前,所述方法还包括:
7、对所述无人机飞行时采集的下方作物种植区域的全部帧图像进行拼接,得到目标作物种植区域图像;
8、对所述目标作物种植区域图像进行空间域滤波,得到作物倒伏区域图像;
9、从所述作物倒伏区域图像中提取出所述作物倒伏信息。
10、根据本发明提供的一种无人机飞行高度控制方法,所述从所述作物倒伏区域图像中提取出所述作物倒伏信息,包括:
11、从所述作物倒伏区域图像中提取各株作物的作物倒伏特征信息;
12、将所述作物倒伏特征信息与预设作物倒伏特征库进行特征点匹配,确定所述作物倒伏区域的作物倒伏角度信息;
13、基于所述作物倒伏区域的作物倒伏角度信息,确定所述作物倒伏信息。
14、根据本发明提供的一种无人机飞行高度控制方法,所述将所述作物倒伏特征信息与预设作物倒伏特征库进行特征点匹配,确定所述作物倒伏区域的作物倒伏角度信息,包括:
15、将各株作物的所述作物倒伏特征信息与预设作物倒伏特征库进行特征点匹配,得到各株作物的倒伏角度信息;
16、对所述各株作物的倒伏角度信息求平均,得到所述作物倒伏区域的作物倒伏角度信息。
17、根据本发明提供的一种无人机飞行高度控制方法,在所述确定所述作物倒伏区域的作物倒伏角度信息之后,所述方法还包括:
18、获取所述作物倒伏区域中作物的种类信息和生育期信息;
19、根据所述作物倒伏区域的作物倒伏角度信息、所述作物的种类信息和生育期信息,得到所述作物倒伏信息。
20、根据本发明提供的一种无人机飞行高度控制方法,在所述将所述作物倒伏信息输入至无人机飞行高度预测模型之前,所述方法还包括:
21、将所述作物倒伏信息样本及其对应的无人机飞行高度标签作为一组训练样本,获取多组训练样本;
22、利用所述多组训练样本,对无人机飞行高度预测模型进行训练。
23、根据本发明提供的一种无人机飞行高度控制方法,所述利用所述多组训练样本,对无人机飞行高度预测模型进行训练,包括:
24、对于任意一组训练样本,将所述训练样本输入至所述无人机飞行高度预测模型,输出所述训练样本对应的预测概率;
25、利用预设损失函数,根据所述训练样本对应的预测概率和所述训练样本对应的无人机飞行高度标签,计算损失值;
26、基于所述损失值,对所述无人机飞行高度预测模型的模型参数进行调整,直至所述损失值小于预设阈值或训练次数达到预设次数;
27、将所述损失值小于所述预设阈值或训练次数达到所述预设次数时所得到的模型参数作为训练好的无人机飞行高度预测模型的模型参数,则无人机飞行高度预测模型训练完成。
28、本发明还提供一种无人机飞行高度控制装置,包括:
29、获取模块,用于获取无人机飞行时下方作物倒伏区域的作物倒伏信息;
30、预测模块,用于将所述作物倒伏信息输入至无人机飞行高度预测模型,得到所述无人机飞行高度预测模型输出的目标飞行高度;所述无人机飞行高度预测模型是根据作物倒伏信息样本及其对应的无人机飞行高度标签进行训练得到的;
31、控制模块,用于控制所述无人机按照所述目标飞行高度进行飞行。
32、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述无人机飞行高度控制方法。
33、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述无人机飞行高度控制方法。
34、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述无人机飞行高度控制方法。
35、本发明提供的无人机飞行高度控制方法、装置、电子设备及存储介质,通过充分挖掘无人机飞行高度与作物倒伏信息之间的内在联系,利用大量作物倒伏信息样本及其对应的无人机飞行高度标签进行神经网络模型训练,得到无人机飞行高度预测模型,使得无人机飞行高度预测模型在输入作物倒伏区域的作物倒伏信息时,可以有效预测出用于高效施药的目标飞行高度,从而控制无人机按照该目标飞行高度进行飞行施药,使作物的倒伏程度始终保持在合理的范围内,达到最佳施药效果,显著提高了植保无人机对作物的施药作业效果,提高了农药利用率。
技术特征:
1.一种无人机飞行高度控制方法,其特征在于,包括:
2.根据权利要求1所述的无人机飞行高度控制方法,其特征在于,在所述获取无人机飞行时下方作物倒伏区域的作物倒伏信息之前,所述方法还包括:
3.根据权利要求2所述的无人机飞行高度控制方法,其特征在于,所述从所述作物倒伏区域图像中提取出所述作物倒伏信息,包括:
4.根据权利要求3所述的无人机飞行高度控制方法,其特征在于,所述将所述作物倒伏特征信息与预设作物倒伏特征库进行特征点匹配,确定所述作物倒伏区域的作物倒伏角度信息,包括:
5.根据权利要求3所述的无人机飞行高度控制方法,其特征在于,在所述确定所述作物倒伏区域的作物倒伏角度信息之后,所述方法还包括:
6.根据权利要求1-5任一项所述的无人机飞行高度控制方法,其特征在于,在所述将所述作物倒伏信息输入至无人机飞行高度预测模型之前,所述方法还包括:
7.根据权利要求6所述的无人机飞行高度控制方法,其特征在于,所述利用所述多组训练样本,对无人机飞行高度预测模型进行训练,包括:
8.一种无人机飞行高度控制装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述无人机飞行高度控制方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述无人机飞行高度控制方法。
技术总结
本发明提供一种无人机飞行高度控制方法、装置、电子设备及存储介质,属于农业技术领域,所述方法包括:获取无人机飞行时下方作物倒伏区域的作物倒伏信息;将所述作物倒伏信息输入至无人机飞行高度预测模型,得到所述无人机飞行高度预测模型输出的目标飞行高度;所述无人机飞行高度预测模型是根据作物倒伏信息样本及其对应的无人机飞行高度标签进行训练得到的;控制所述无人机按照所述目标飞行高度进行飞行。本发明可以有效预测出用于高效施药的目标飞行高度,从而控制无人机按照该目标飞行高度进行飞行施药,使作物的倒伏程度始终保持在合理的范围内,达到最佳施药效果,显著提高了植保无人机对作物的施药作业效果,提高了农药利用率。
技术研发人员:张瑞瑞,陈立平,伊铜川,李龙龙,胡鹏,唐青
受保护的技术使用者:北京市农林科学院智能装备技术研究中心
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!