一种适用于探测器从星体表面起飞的模糊控制方法
本发明涉及空间探测器控制领域,尤其涉及一种适用于探测器从星体表面起飞的模糊控制方法。
背景技术:
1、随着空间探测技术的逐渐发展,各国太空竞争的形势愈发激烈,以月球为例,六十多年来国际上已经进行上百次的探测活动,探测任务也变得多样与复杂。以采样任务为例,探测器在其他星球表面着陆并完成任务后,需要起飞进行返航,或受地形或其他因素的影响,需要再次起飞与降落来调整自身的位置与姿态。在起飞过程中,飞行器的姿态控制是保证顺利起飞与后续入轨的关键。
2、此外,由于与地球距离较远,着陆星体环境不确定性大,对姿态控制方法的自主性、稳定性与鲁棒性要求较高。对于输出力矩由固定的姿控发动机提供的探测器而言,其姿控发动机不具有调节推力大小功能,只能控制其开关。现在常用的pd控制器需要对输出力矩进行调制,计算量较大,对探测器的实时控制产生限制,且对于存在参数误差的情况,预先调整的控制器参数无法达到预期的控制效果。
技术实现思路
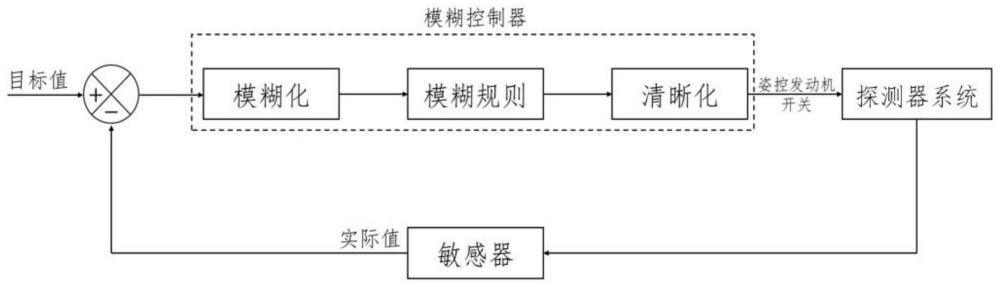
1、为了解决上述技术问题,本发明提供一种适用于探测器从星体表面起飞的模糊控制方法,包括模糊控制器的结构设计;控制器输入输出量的模糊化;模糊控制规则;姿控发动机输出量的清晰化四个部分。使用时对探测器的角度与角速度进行模糊控制,提升了探测器起飞时进行姿态调节的鲁棒性,同时控制方法的算力要求较小,有助于提升控制的实时性。
2、为达到上述目的,本发明采用的技术方案如下:
3、一种适用于探测器从星体表面起飞的模糊控制方法,包括如下步骤:
4、步骤1.基于分档模糊集法,对输入量与输出量进行模糊化;
5、步骤2.制定模糊控制规则,确定输入模糊量与输出力矩模糊量的逻辑关系;
6、步骤3.输出量清晰化,确定根据模糊控制规则得到的输出力矩模糊量对应的姿控发动机开关状态。
7、进一步地,所述步骤1中,所述分档模糊集法将模糊集合论域上的精确量分成若干档,每一档对应一个模糊集合,最多同时开启两个姿控发动机时,将各轴的控制输出力矩mc=[mz my mx]t的模糊论域分为2级,即mz,my,mx的模糊论域为{-2,-1,0,1,2};与模糊论域对应的词集为{负大,负小,零,正小,正大},即{nb,ns,zo,pspb};
8、记探测器目标姿态为θd=[φd ψd γd]t,其中φd、ψd、γd分别为目标姿态的欧拉角,当前时间的实际姿态为θa=[φa ψa γa]t,其中φa、ψa、γa分别为当前姿态的欧拉角,姿态角误差θd-θa=δθ=[δφ δψ δβ]t,其中δφ、δψ、δγ分别为目标姿态与当前姿态的欧拉角误差;将姿态角误差δθ模糊化时的模糊论域分为2级,即{-2,-1,0,1,2};与模糊论域对应的词集为{负大,负小,零,正小,正大},即{nb,ns,zo,ps,pb};记角度误差阈值为θthr,将姿态角误差δφ,δψ和δγ进行模糊化;当姿态角误差处于(-∞,-θthr]区间内时,模糊化的结果为nb,对应模糊论域的-2;当姿态角误差处于(-θthr,0)区间内时,模糊化的结果为ns,对应模糊论域的-1;当姿态角误差为0时,模糊化的结果为zo,对应模糊论域的0;当姿态角误差处于(0,θthr)区间内时,模糊化的结果为ps,对应模糊论域的1;当姿态角误差处于[θthr,∞)区间内时,模糊化的结果为pb,对应模糊论域的2;
9、探测器目标角速度为ωd=[0 0 0]t,实际角速度为则角速度误差为其中分别为三个欧拉角速度的误差;将角速度误差δω模糊化时的论域分为3级,即{-3,-2,-1,0,1,2,3};与模糊论域对应的词集为{负大,负中,负小,零,正小,正中,正大},即{nb,nm,ns,zo,ps,pm,pb};记角速度误差阈值下限为ωinf,角速度误差阈值上限为ωsup,均由敏感器饱和转速决定,将姿态角误差和进行模糊化;当姿态角误差处于(-∞,-ωsup]区间内时,模糊化的结果为nb,对应模糊论域的-3;当姿态角误差处于(-ωsup,-ωinf]区间内时,模糊化的结果为nm,对应模糊论域的-2;当姿态角误差处于(-ωinf,0)区间内时,模糊化的结果为ns,对应模糊论域的-1;当姿态角误差为0时,模糊化的结果为zo,对应模糊论域的0;当姿态角误差处于(0,ωinf)区间内时,模糊化的结果为ps,对应模糊论域的1;当姿态角误差处于[ωinf,ωsup)区间内时,模糊化的结果为pm,对应模糊论域的2;当姿态角误差处于[ωsup,∞)区间内时,模糊化的结果为pb,对应模糊论域的3;
10、由此完成对控制器输入量和输出量模糊论域的转换,即对输入量和输出量的模糊化。
11、进一步地,所述步骤2中的模糊控制规则考虑探测器姿态角误差和姿态角速度误差;以尽快消除姿态角误差为目标,同时避免姿态角速度变化过快引起敏感期饱和,获得模糊化的力矩输出结果,具体规则为:姿态角误差为正大,当姿态角速度误差大于负中时,输出力矩均为正大;当姿态角速度误差为负中时,输出力矩为正中;当姿态角速度误差为负大时,输出力矩为负小;姿态角误差为正小,当姿态角速度误差大于负小时,输出力矩均为正大;当姿态角速度误差等于负小时,输出力矩为正小;当姿态角速度误差大于负小时,输出力矩为负小;姿态角误差为零,当姿态角速度误差大于零时,输出力矩均为正大;当姿态角速度误差为零时,输出力矩为零;当姿态角速度误差小于零,输出力矩均为负小;当姿态角误差为负小时,当姿态角速度误差小于正小时,输出力矩为正小;当姿态角速度误差小于或等于零且大于或等于正小时,输出力矩为负小;当姿态角速度误差小于零时,输出力矩为负大;姿态角误差为负大,当姿态角速度误差为正大时,输出力矩为正小;当姿态角速度误差为正中时,输出力矩为负小;等姿态角速度误差小于正中时,输出力矩为负大。
12、进一步地,所述步骤3中,所述输出量清晰化结合每个姿控发动机启动时对探测器三个轴向的力矩,分别对探测器上升方向与垂直于上升方向的平面进行考虑,即对探测器的俯仰与滚转进行调控,将依据模糊控制规则给出的结果转换为各个姿控发动机的开关状态。
13、有益效果:
14、本发明采用的模糊控制是一种基于规则的控制,具有控制机理和策略易于接受和理解、设计简单、便于应用的优势,此外,使用if-then规则和语言变量实现控制,因此姿态信息可以被直接对应到姿控发动机的开关状态,无需输出力矩调制这一步骤。同时模糊控制一般仅有若干次判断,相比于传统的pd控制器计算量更小,产生的延迟更少。
15、本发明使用模糊控制器,可以直接将不同姿控发动机组合开机的情况下的推力按照进行排序并模糊化,对应模糊控制的输出,简化控制器的设计。
16、本发明的模糊控制器并不依赖于精确的数学模型,因此对于探测器这种具有不确定性的系统依然能够使用,提升控制的鲁棒性。
技术特征:
1.一种适用于探测器从星体表面起飞的模糊控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种适用于探测器从星体表面起飞的模糊控制方法,其特征在于,所述步骤1中,所述分档模糊集法将模糊集合论域上的精确量分成若干档,每一档对应一个模糊集合,最多同时开启两个姿控发动机时,将各轴的控制输出力矩mc=[mz my mx]t的模糊论域分为2级,即mz,my,mx的模糊论域为{-2,-1,0,1,2};与模糊论域对应的词集为{负大,负小,零,正小,正大},即{nb,ns,zo,ps pb};
3.根据权利要求2所述的一种适用于探测器从星体表面起飞的模糊控制方法,其特征在于,所述步骤2中的模糊控制规则考虑探测器姿态角误差和姿态角速度误差;以尽快消除姿态角误差为目标,同时避免姿态角速度变化过快引起敏感期饱和,获得模糊化的力矩输出结果,具体规则为:姿态角误差为正大,当姿态角速度误差大于负中时,输出力矩均为正大;当姿态角速度误差为负中时,输出力矩为正中;当姿态角速度误差为负大时,输出力矩为负小;姿态角误差为正小,当姿态角速度误差大于负小时,输出力矩均为正大;当姿态角速度误差等于负小时,输出力矩为正小;当姿态角速度误差大于负小时,输出力矩为负小;姿态角误差为零,当姿态角速度误差大于零时,输出力矩均为正大;当姿态角速度误差为零时,输出力矩为零;当姿态角速度误差小于零,输出力矩均为负小;当姿态角误差为负小时,当姿态角速度误差小于正小时,输出力矩为正小;当姿态角速度误差小于或等于零且大于或等于正小时,输出力矩为负小;当姿态角速度误差小于零时,输出力矩为负大;姿态角误差为负大,当姿态角速度误差为正大时,输出力矩为正小;当姿态角速度误差为正中时,输出力矩为负小;等姿态角速度误差小于正中时,输出力矩为负大。
4.根据权利要求3所述的一种适用于探测器从星体表面起飞的模糊控制方法,其特征在于,所述步骤3中,所述输出量清晰化结合每个姿控发动机启动时对探测器三个轴向的力矩,分别对探测器上升方向与垂直于上升方向的平面进行考虑,即对探测器的俯仰与滚转进行调控,将依据模糊控制规则给出的结果转换为各个姿控发动机的开关状态。
技术总结
本发明公开一种适用于探测器从星体表面起飞的模糊控制方法,涉及姿态控制领域,包括模糊控制器的结构设计;控制器输入输出量的模糊化;模糊控制规则;姿控发动机输出量的清晰化四个部分。使用时对探测器的角度与角速度进行模糊控制,提升了探测器起飞时进行姿态调节的鲁棒性,同时控制方法的算力要求较小,有助于提升控制的实时性。
技术研发人员:黄行蓉,杜宇,金士博,杨东来
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!