一种弱操纵效率下的滚动通道自适应变结构控制方法与流程
本发明涉及飞行器飞行控制领域,特别涉及针对低马赫副翼弱操纵效率、气动强不确定性下控制性能下降的一种弱操纵效率下的滚动通道自适应变结构控制方法。
背景技术:
1、针对地面或者箭船发射的飞行器,需要经历马赫数从低到高的加速过程,针对低速状态空气舵舵效偏低的问题,工程上可以采用燃气舵提高控制效率的控制方案,但是,有些飞行器对发射方式有严格的限制,比如箭船上一般要求桶装发射,总体方案设计上针对助推飞行段,俯偏通道一般采用摆动喷管控制,可以保证俯偏通道有足够的控制效率,滚动通道只能采用前面级导弹的空气舵控制滚动,会存在初始助推飞行段,由于马赫数较低副翼控制效率较低,难以有效抑制初始角速度干扰带来通道间耦合,影响飞行控制品质,甚至失稳的风险,因此对于低马赫下弱操纵效率的控制策略或控制方法显得尤为重要。
2、目前国内飞行器控制方法领域中均无涉及针对初始发射段副翼舵效过低的一种自适应变结构控制方法。
技术实现思路
1、本发明的目的在于:针对初始发射段低马赫数下副翼效率过低,干扰抑制和姿态响应等控制品质难以保证的问题,提供一种弱操纵效率下的滚动通道自适应变结构控制方法,该方法根据飞行状态自适应变化控制结构,在低速阶段提高干扰抑制性能,保证通道间解耦,提高稳定性,在速度增大后,自适应提高姿态控制精度,改善飞行控制品质。
2、本发明提供的一种弱操纵效率下的滚动通道自适应变结构控制方法包括:
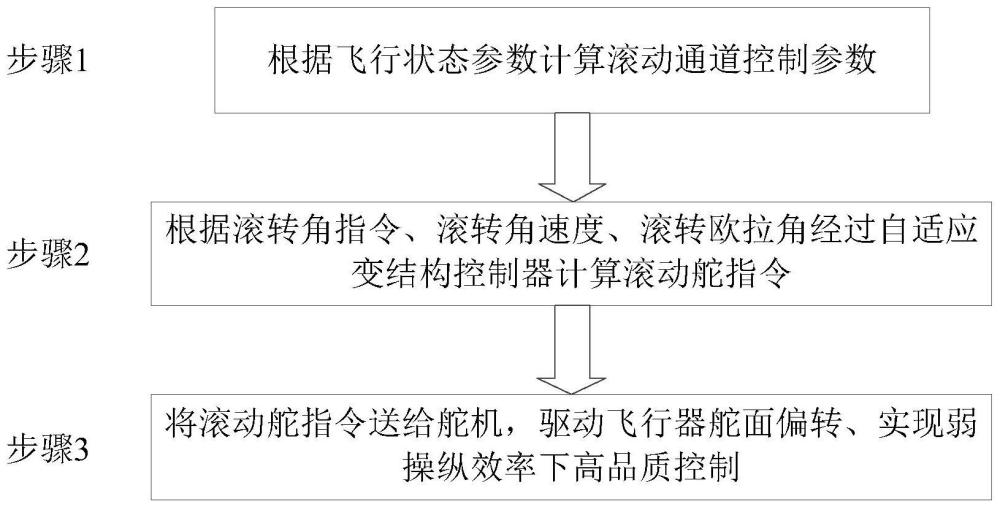
3、步骤一、步骤一、根据惯导解算单元计算出的飞行器马赫数、动压、速度等飞行器参数实时计算出滚动通道控制参数g2、g3、g4;
4、步骤二、根据制导指令解算单元解算出的飞行器滚转角指令γc,惯导解算单元计算出的实时滚转欧拉角γ、马赫数ma,惯测敏感到的滚转角速度ωx,根据滚动通道自适应变结构策略计算出滚动通道舵指令δr;
5、步骤三:将滚动通道舵指令δr送给舵机,驱动导弹舵面偏转,实现弱操纵效率下对滚动干扰的抑制和滚转姿态角的跟踪。
6、进一步,步骤二所述的滚动通道自适应变结构控制策略为:a)当ma<ma_down时,采用增稳控制回路计算滚动舵偏指令;b)当ma_min<=ma<ma_up时,从增稳控制逐步向姿态控制过渡计算滚动舵偏指令;c)当ma_up<=ma时,采用完整的姿态控制回路计算滚动舵偏指令。
7、进一步,步骤二所述的滚动通道自适应变结构控制策略的典型算法为:
8、a)当ma<ma_down时,采用增稳控制方法,计算方法为:δr(k)=g2×uωx(k);
9、b)当ma_down<=ma<ma_up时,首先计算姿态角偏差指令uδγ(k),计算方法为:uδγ(k)=0.5×h×g4×[δγ1(k)+δγ1(k-1)]+uδγ(k-1),式中δγ1是对滚转角指令变化率限幅后的滚转角姿态偏差,计算方法为然后根据姿态偏差角指令uδγ(k)和uωx(k)计算滚转舵指令δr(k),方法为:δr(k)=g2×uωx(k)+g3×(1.6667×ma-0.6667)×(yir(k)-uδγ(k)),其中yir(k)=0.5×h×[uωx(k)+uωx(k-1)]+yir(k-1)。
10、c)当ma_up<=ma时,采用完整的姿态控制回路,滚转舵指令δr(k)计算方法为:δr(k)=g2×uωx(k)+g3×(yir(k)-uδγ(k))
11、上式中,典型算法中h表示计算补偿,典型值取0.0025,k表示当前时刻;
12、上式中,uωx(k)表示滚转角速度ωx滤波后的值,典型滤波算法为
13、uωx(k)=-e1uωx(k-1)-e2uωx(k-2)+f0ωx(k)+f1ωx(k-1)+f2ωx(k-2),其中e1、e2、f0、f1、f2为常值,典型取值为e1=-1.709,e2=0.7304,f0=0.01729,f1=-0.009606,f2=0.01345。
14、进一步,滚动通道自适应变结构控制策略的典型算法中:ma_down、ma_up的取值根据飞行器的气动特性、总体参数以及飞行需求确定,典型的,ma_down取值0.3,ma_up取值1.2。
15、本发明的优点包括:针对初始发射段低马赫数下副翼效率过低,干扰抑制和姿态响应等控制品质下降的问题,提供一种弱操纵效率下的滚动通道自适应变结构控制方法,该方法根据飞行马赫数自适应变化控制结构,在低马赫数阶段采用增稳控制回路结构,提高干扰抑制性能,保证通道间解耦,提高稳定性,在速度增大后,采用姿态控制回路结构,自适应提高姿态控制精度,改善飞行控制品质。
技术特征:
1.一种弱操纵效率下的滚动通道自适应变结构控制方法,其特征在于,步骤如下:
2.根据权利要求1所述的一种弱操纵效率下的滚动通道自适应变结构控制方法,其特征在于,步骤二所述的滚动通道自适应变结构控制策略为:
3.根据权利要求2所述的一种弱操纵效率下的滚动通道自适应变结构控制方法,其特征在于,所述的滚动通道自适应变结构控制策略的典型算法为:
4.根据权利要求3所述的一种弱操纵效率下的滚动通道自适应变结构控制方法,其特征在于,典型取值为:
5.根据权利要求3所述的一种弱操纵效率下的滚动通道自适应变结构控制方法,其特征在于,所述滚动通道自适应变结构控制策略的典型算法中:ma_down、ma_up的取值根据飞行器的气动特性、总体参数以及飞行需求确定。
6.根据权利要求5所述的一种弱操纵效率下的滚动通道自适应变结构控制方法,其特征在于,典型的ma_down取值0.3,ma_up取值1.2。
技术总结
本发明提供的一种弱操纵效率下的滚动通道自适应变结构控制方法,方法包括:步骤一、根据惯导解算单元计算出的飞行器马赫数、动压、速度等飞行器参数实时计算出滚动通道控制参数;步骤二、将制导指令解算单元解算出的飞行器滚转角指令、惯导解算单元计算出的实时滚转欧拉角和马赫数、惯测敏感到的滚转角速度,根据滚动通道自适应变结构策略计算出滚动通道舵指令;步骤三、将滚动通道舵指令送给舵机,驱动导弹舵面偏转,实现弱操纵效率下对滚动干扰的抑制和滚转姿态角的跟踪。本发明提供的一种弱操纵效率下的滚动通道自适应变结构控制方法,能够根据飞行工况实时改变滚动通道控制结构,提高副翼弱操纵效率下飞行器的鲁棒性,改善控制品质。
技术研发人员:廖幻年,陈光山,程笠,何飞毅,田野
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!