一种无人飞行器地面控制车管理监控方法及系统与流程
本发明属于管理监控领域,具体涉及一种无人飞行器地面控制车管理监控方法及系统。
背景技术:
1、近年,无人飞行器行业蓬勃发展,地面控制站需求日益旺盛,随着一站多机需求落地,地面控制站朝着复杂化、智能化方向发展。随着无人机在国防、农业、航拍等领域的广泛应用,地面控制作为无人机的核心控制部分,进行着数据、图像的采集和传输工作,飞行姿态和路线的控制工作,飞行作业情况的监控工作等,是整个无人机系统的关键部分。
2、现有技术中通过监控系统与无人飞行器地面控制车上的设备进行连接,实现控制,但设备数量较多,拓扑连接、业务逻辑复杂,故障分析、定位难度大,往往依赖人的经验,排查周期长,进而影响无人飞行器任务执行;同时现有技术中单机设备支持运行状态监控,但软硬件接口不一,缺乏地面站系统级统一监控、管理,存在信息孤岛。
技术实现思路
1、本发明的目的在于针对解决背景技术中提出的问题,提出一种无人飞行器地面控制车管理监控方法及系统。
2、为实现上述目的,本发明所采取的技术方案为:
3、本发明提出的一种无人飞行器地面控制车管理监控方法,包括采集层采集无人飞行器地面控制车上各设备的运行状态参数的值,并发送至数据接收模块,且所述数据接收模块将接收到的数据发送至数据预处理模块;
4、所述数据预处理模块将各设备的运行状态参数的值转化为结构化数据并发送至数据库模块进行缓存;
5、所述数据库模块实现与数据库连接,并将接收到的数据存入数据库;
6、故障告警模块访问数据库,将各设备的运行状态参数中的关键参数的值与预设的第一阈值进行比较,并将连续n个时刻的参数值都在第一阈值范围以外的关键参数生成对应的故障类型,且将故障类型在数据库中存储;
7、故障专家库获取数据库中的故障类型后,与故障专家库中的故障模型进行比较匹配,当配到对应的故障类型时,故障专家库输出该故障类型对应的故障原因项;
8、智能分析处理模块根据故障原因项访问数据库并进行提取对应的运行状态参数,根据提取的运行状态参数的最新时刻值与第一阈值进行比较,将在第一阈值以外的运行状态参数作为该故障类型的原因定位,同时写入至数据库中;
9、展示层通过通信交互模块访问数据库,并进行各设备的运行状态展示。
10、优选地,所述故障告警模块访问数据库时,还将各设备的运行状态参数中的关键参数的值与预设的第二阈值进行比较,并将连续n个时刻的参数值都在预设的第二阈值范围以外的关键参数发出告警信息,并将告警信息存入数据库,且展示层通过通过通信交互模块访问数据库,展示告警信息。
11、优选地,所述故障专家库获取数据库中的故障类型后,与故障专家库中的故障模型进行比较匹配,当没有匹配到对应的故障类型时,人为对数据库中的故障类型进行分析,得到对应故障原因项并存储至故障专家库中。
12、优选地,所述故障专家库是故障模型的集合,所述故障模型包括故障类型和故障类型对应的故障原因项信息。
13、一种无人飞行器地面控制车管理监控系统,包括采集层、服务层和应用层,所述服务层包括数据接收模块、数据预处理模块、数据库模、数据库、故障告警模块、故障专家库和智能分析处理模块,其中:
14、所述采集层,用于采集层采集无人飞行器地面控制车上各设备的运行状态参数的值,并发送至数据接收模块,且所述数据接收模块用于将接收到的数据发送至数据预处理模块;
15、所述数据预处理模块,用于各设备的运行状态参数的值转化为结构化数据并发送至数据库模块进行缓存;
16、所述数据库模块,用于实现与数据库连接,并将接收到的数据存入数据库;
17、所述故障告警模块,用于访问数据库,将各设备的运行状态参数中的关键参数的值与预设的第一阈值进行比较,并将连续n个时刻的参数值都在第一阈值范围以外的关键参数生成对应的故障类型,且将故障类型在数据库中存储;
18、所述故障专家库,用于获取数据库中的故障类型后,与故障专家库中的故障模型进行比较匹配,当配到对应的故障类型时,故障专家库输出该故障类型对应的故障原因项;
19、所述智能分析处理模块,用于根据故障原因项访问数据库并进行提取对应的运行状态参数,根据提取的运行状态参数的最新时刻值与第一阈值进行比较,将在第一阈值以外的运行状态参数作为该故障信息的原因定位,同时写入至数据库中;
20、所述展示层,用于通过通信交互模块访问数据库,并进行各设备的运行状态展示。
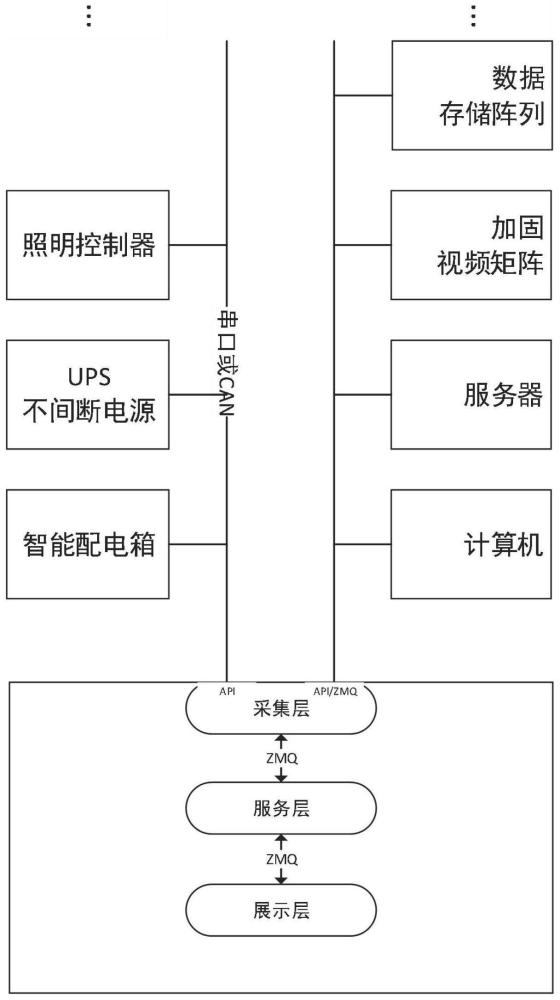
21、优选地,所述无人飞行器地面控制车上的各设备至少包括均与采集层电连接的智能配电箱、ups不间断电源、照明控制器、计算机、服务器、数据存储阵列和加固视频矩阵机。
22、优选地,所述智能配电箱的运行状态参数至少包括供电来源、输入功率、输入电压、输入电流、输入频率、第一输出电压、第一输出电流、第一输出频率和漏电流;
23、所述ups不间断电源的运行状态参数至少包括工作模式、第二输出电压、第二输出电流、第二输出频率和剩余电量;
24、所述照明控制器的运行状态参数至少包括照明模式、亮度和色温;
25、所述计算机、服务器和数据存储阵列的运行状态参数均至少包括cpu使用率、内存使用率、硬盘使用率、gpu温度、cpu温度、ip信息、mac信息、丢包数据、通断信息、网络连接状态和网盘连接状态;
26、所述加固视频矩阵机的运行状态参数至少包括链路状态和网盘连接状态。
27、与现有技术相比,本发明的有益效果为:
28、1、本无人飞行器地面控制车管理监控方法及系统首先将无人飞行器地面控制车上各设备的运行状态参数中的关键参数与第一阈值进行比较,生成故障类型,然后将该故障类型与故障专家库中的故障模型进行匹配,在匹配到时故障专家库输出该故障类型对应的故障原因项,并且智能分析处理模块根据故障原因项提取对应的运行状态参数的值,将在第一阈值以外的运行状态参数作为该故障类型的原因定位,整个过程可以实现对故障的快速排查,节省了时间,快速便捷,使得无人飞行器地面控制车可以正常工作;
29、2、本无人飞行器地面控制车管理监控方法及系统在生成故障类型之前,通过连续读取n个时刻关键参数的参数值与第一阈值进行比较,防止造成故障的误判;同时对各设备的运行状态进行统一监控,方便统一管理。
技术特征:
1.一种无人飞行器地面控制车管理监控方法,其特征在于:所述无人飞行器地面控制车管理监控方法,包括:
2.如权利要求1所述的无人飞行器地面控制车管理监控方法,其特征在于:所述故障告警模块访问数据库时,还将各设备的运行状态参数中的关键参数的值与预设的第二阈值进行比较,并将连续n个时刻的参数值都在预设的第二阈值范围以外的关键参数发出告警信息,并将告警信息存入数据库,且展示层通过通过通信交互模块访问数据库,展示告警信息。
3.如权利要求1所述的无人飞行器地面控制车管理监控方法,其特征在于:所述故障专家库获取数据库中的故障类型后,与故障专家库中的故障模型进行比较匹配,当没有匹配到对应的故障类型时,人为对数据库中的故障类型进行分析,得到对应故障原因项并存储至故障专家库中。
4.如权利要求1所述的无人飞行器地面控制车管理监控方法,其特征在于:所述故障专家库是故障模型的集合,所述故障模型包括故障类型和故障类型对应的故障原因项信息。
5.一种无人飞行器地面控制车管理监控系统,其特征在于:所述无人飞行器地面控制车管理监控系统包括采集层、服务层和应用层,所述服务层包括数据接收模块、数据预处理模块、数据库模、数据库、故障告警模块、故障专家库和智能分析处理模块,其中:
6.如权利要求5所述的无人飞行器地面控制车管理监控系统,其特征在于:所述无人飞行器地面控制车上的各设备至少包括均与采集层电连接的智能配电箱、ups不间断电源、照明控制器、计算机、服务器、数据存储阵列和加固视频矩阵机。
7.如权利要求6所述的无人飞行器地面控制车管理监控系统,其特征在于:所述智能配电箱的运行状态参数至少包括供电来源、输入功率、输入电压、输入电流、输入频率、第一输出电压、第一输出电流、第一输出频率和漏电流;
技术总结
本发明公开了一种无人飞行器地面控制车管理监控方法及系统,包括采集层采集无人飞行器地面控制车上各设备的运行状态参数的值,并发送至数据接收模块。本无人飞行器地面控制车管理监控方法及系统首先将无人飞行器地面控制车上各设备的运行状态参数中的关键参数与第一阈值进行比较,生成故障类型,然后将该故障类型与故障专家库中的故障模型进行匹配,在匹配到时故障专家库输出该故障类型对应的故障原因项,并且智能分析处理模块根据故障原因项提取对应的运行状态参数的值,将在第一阈值以外的运行状态参数作为该故障类型的原因定位,整个过程可以实现对故障的快速排查,节省了时间,快速便捷,使得无人飞行器地面控制车可以正常工作。
技术研发人员:杨峰,陶磊,周玄文,张寿丰,陈周锋
受保护的技术使用者:中国电子科技集团公司第五十二研究所
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!