自移动设备的控制方法、控制单元及自移动设备与流程
本说明书实施例涉及人工智能,特别涉及自移动设备的控制方法、控制单元及自移动设备。
背景技术:
1、随着计算机技术、互联网和人工智能技术的快速发展,自移动设备逐渐应用在工作生活的各个方面,如服务机器人、割草机器人等各种机器人。为实现自移动设备在实际使用场景(即实际物理空间)中的自动行走功能,需要基于自移动设备上的定位装置进行定位,控制自移动设备进行移动。
2、在现有技术中,自移动设备的工作区域环境较为复杂,用户会将工作区域手动或者通过算法自动分为多个区域,由于自移动设备的定位装置在局部区域存在定位偏差,导航控制存在控制偏差,因而在相邻区域的交界处可能会存在遗漏区域,自移动设备的工作区域的覆盖率较差,进而需要更准确的方法进行自移动设备的控制操作或者处理。
技术实现思路
1、有鉴于此,本说明书实施例提供了一种自移动设备的控制方法。本说明书一个或者多个实施例同时涉及一种自移动设备的控制单元,一种自移动设备,一种计算机可读存储介质以及一种计算机程序,以解决现有技术中存在的技术缺陷。
2、根据本说明书实施例的第一方面,提供了一种自移动设备的控制方法,所述自移动设备上设置有定位装置,所述方法包括:
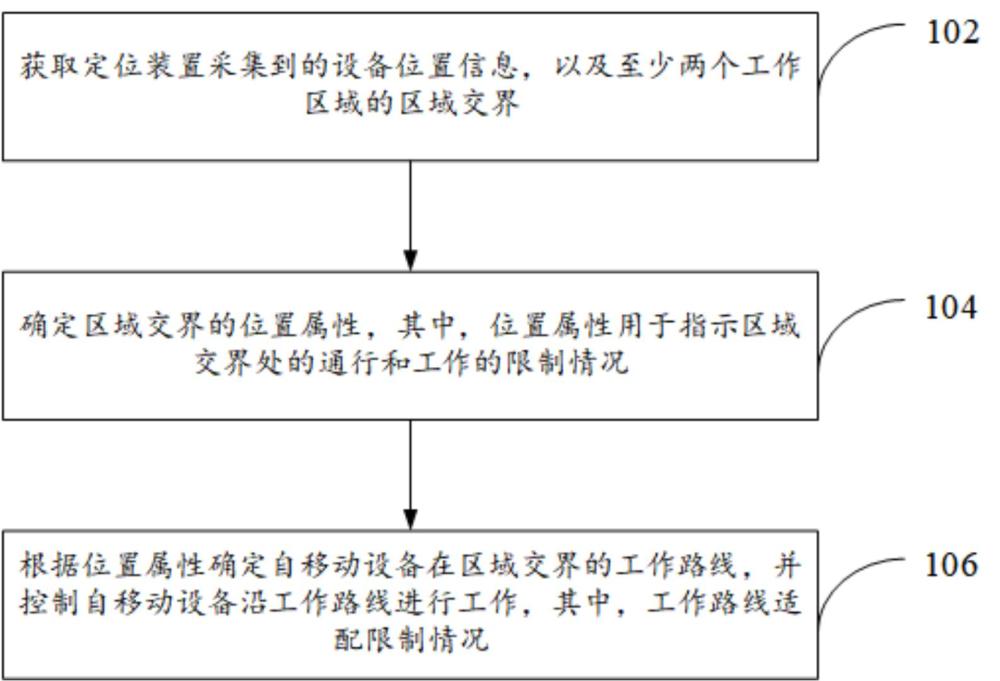
3、获取所述定位装置采集到的设备位置信息,以及至少两个工作区域的区域交界;
4、确定所述区域交界的位置属性,其中,所述位置属性用于指示所述区域交界处的通行和工作的限制情况;
5、根据所述位置属性确定所述自移动设备在所述区域交界的工作路线,并控制所述自移动设备沿所述工作路线进行工作,其中,所述工作路线适配所述限制情况。
6、根据本说明书实施例的第二方面,提供了一种自移动设备的控制单元,所述自移动设备上设置有定位装置,所述控制单元包括:
7、获取模块,被配置为获取所述定位装置采集到的设备位置信息,以及至少两个工作区域的区域交界;
8、第一确定模块,被配置为确定所述区域交界的位置属性,其中,所述位置属性用于指示所述区域交界处的通行和工作的限制情况;
9、第二确定模块,被配置为根据所述位置属性确定所述自移动设备在所述区域交界的工作路线,并控制所述自移动设备沿所述工作路线进行工作,其中,所述工作路线适配所述限制情况。
10、根据本说明书实施例的第三方面,提供了一种自移动设备,包括:
11、本体,
12、驱动模块,设置于所述本体,用于驱动所述本体行进;
13、执行模块,设置于所述本体,用于执行工作任务;
14、定位装置,设置于所述本体;
15、存储器,用于存储计算机程序;
16、处理器,与所述存储器耦合,所述程序包括指令,所述指令在由所述处理器执行时使所述处理器执行操作,所述操作包括上述的自移动设备的控制方法的操作。
17、根据本说明书实施例的第四方面,提供了一种计算机可读存储介质,其存储有计算机可执行指令,该指令被处理器执行时实现上述的自移动设备的控制方法的步骤。
18、根据本说明书实施例的第五方面,提供了一种计算机程序,其中,当所述计算机程序在计算机中执行时,令计算机执行上述的自移动设备的控制方法的步骤。
19、本说明书一个实施例提供了一种自移动设备的控制方法,所述自移动设备上设置有定位装置,所述方法包括:获取所述定位装置采集到的设备位置信息,以及至少两个工作区域的区域交界;确定所述区域交界的位置属性,其中,所述位置属性用于指示所述区域交界处的通行和工作的限制情况;根据所述位置属性确定所述自移动设备在所述区域交界的工作路线,并控制所述自移动设备沿所述工作路线进行工作,其中,所述工作路线适配所述限制情况。
20、本说明书一个实施例实现了确定区域交界的位置属性,该位置属性可以指示区域交界处的通行和工作的限制情况,根据该位置属性可以确定自移动设备在区域交界的工作路线,并控制自移动设备沿确定出的工作路线进行工作,该工作路线适配该限制情况。如此,可以根据相邻区域的区域交界处的通行和工作的限制情况,动态调整对应的工作路线适配该限制情况,避免在相邻区域的区域交界存在遗漏区域,提高了自移动设备的工作区域的覆盖率,且保证了自移动设备在行进过程中的安全,另外在相邻区域的区域交界动态调整对应的工作路线,可以使得自移动设备更智能,交互性更好。
技术特征:
1.一种自移动设备的控制方法,其特征在于,所述自移动设备上设置有定位装置,所述方法包括:
2.根据权利要求1所述的自移动设备的控制方法,其特征在于,所述确定所述区域交界的位置属性,包括:
3.根据权利要求1所述的自移动设备的控制方法,其特征在于,所述确定所述区域交界的位置属性,包括:
4.根据权利要求3所述的自移动设备的控制方法,其特征在于,所述自移动设备上还设置有图像采集装置;所述确定所述区域交界处的物体类型,包括:
5.根据权利要求4所述的自移动设备的控制方法,其特征在于,所述图像采集装置包括相机和/或3d传感器;所述识别所述区域交界处的图像信息,确定所述区域交界处的物体类型,包括:
6.根据权利要求3-5任一项所述的自移动设备的控制方法,其特征在于,所述根据所述物体类型确定所述区域交界的位置属性,包括:
7.根据权利要求1-5任一项所述的自移动设备的控制方法,其特征在于,所述根据所述位置属性确定所述自移动设备在所述区域交界的工作路线,包括:
8.根据权利要求7所述的自移动设备的控制方法,其特征在于,所述在所述位置属性为其他工作属性的情况下,对所述区域交界的初始行进路线进行内缩或外扩,确定所述自移动设备在所述区域交界的工作路线,包括:
9.根据权利要求7所述的自移动设备的控制方法,其特征在于,所述对所述区域交界的初始行进路线进行内缩或外扩,确定所述自移动设备在所述区域交界的工作路线,包括:
10.根据权利要求5所述的自移动设备的控制方法,其特征在于,所述根据所述相机和/或3d传感器采集到的图像信息,利用深度学习模型,确定所述区域交界处的物体类型,包括:
11.根据权利要求1-5任一项所述的自移动设备的控制方法,其特征在于,所述获取所述定位装置采集到的设备位置信息之前,还包括:
12.根据权利要求11所述的自移动设备的控制方法,其特征在于,所述标记相邻区域的区域交界之后,还包括:
13.一种自移动设备的控制单元,其特征在于,所述自移动设备上设置有定位装置,所述控制单元包括:
14.一种自移动设备,其特征在于,其包括:
15.一种计算机可读存储介质,其特征在于,其存储有计算机可执行指令,该计算机可执行指令被处理器执行时实现权利要求1-12任一项所述的自移动设备的控制方法的步骤。
技术总结
本说明书实施例提供自移动设备的控制方法、控制单元及自移动设备,其中自移动设备的控制方法包括:获取定位装置采集到的设备位置信息,以及至少两个工作区域的区域交界;确定区域交界的位置属性,其中,位置属性用于指示区域交界处的通行和工作的限制情况;根据位置属性确定自移动设备在区域交界的工作路线,并控制自移动设备沿工作路线进行工作,其中,工作路线适配限制情况。如此,根据区域交界处的通行和工作的限制情况,动态调整工作路线适配限制情况,避免在区域交界存在遗漏区域,提高自移动设备的工作区域的覆盖率,保证自移动设备在行进过程中的安全。
技术研发人员:郭富安
受保护的技术使用者:科沃斯家用机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!