高空作业设备控制方法、控制装置、高空作业设备及介质与流程
本申请涉及设备控制,具体地涉及一种高空作业设备控制方法、控制装置、高空作业设备及介质。
背景技术:
1、高空作业设备是一种通过控制作业平台的升降,使得位于作业平台上的作业人员能够在指定高度下进行作业的设备。通常高空作业设备的作业模式包括上控模式和下控模式,其中,上控模式是指作业人员通过设置于作业平台的电控箱,控制高空作业设备进行作业。当高空作业设备处于上控模式时,作业人员需要观测周围环境中是否存在障碍物,并在接近障碍物时控制作业平台停止运动。实际作业过程中作业人员难以观察到身后是否存在障碍物,作业平台向后运动的过程中,容易出现作业人员与障碍物发生碰撞挤压的情况。
2、通常高空作业设备的作业平台上设置有摆杆式防挤压装置或柔性拉线式防挤压装置等保护器件。然而,摆杆式防挤压装置或柔性拉线式防挤压装置等保护器件是在作业人员与障碍物发生碰撞挤压时,再触发高空作业设备的制动,无法直接避免作业人员与障碍物发生碰撞挤压的情况发生。作业人员与障碍物发生碰撞挤压容易导致作业人员受到伤害,进而导致了高空作业设备的安全性较低。
技术实现思路
1、本申请实施例的目的是提供一种高空作业设备控制方法、控制装置、高空作业设备及介质,高空作业设用以解决现有技术中高空作业设备的安全性较低的问题。
2、为了实现上述目的,第一方面,本申请提供一种高空作业设备控制方法,高空作业设备包括作业平台、至少一个激光雷达以及至少一个测距传感器,高空作业设备控制方法包括:
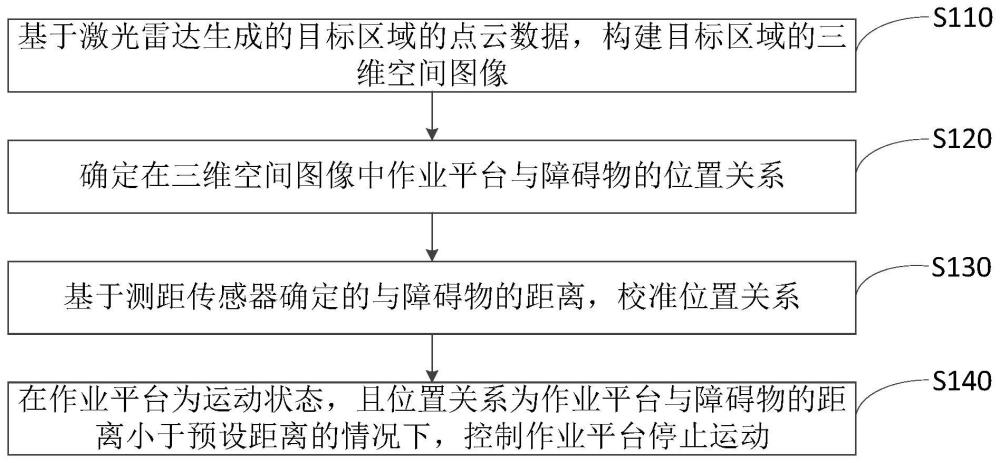
3、基于激光雷达生成的目标区域的点云数据,构建目标区域的三维空间图像,其中,目标区域为存在障碍物的区域;
4、确定在三维空间图像中作业平台与障碍物的位置关系;
5、基于测距传感器确定的与障碍物的距离,校准位置关系;
6、在作业平台为运动状态,且位置关系为作业平台与障碍物的距离小于预设距离的情况下,控制作业平台停止运动。
7、本申请的实施例中,高空作业设备还包括至少一个超声波测距传感器,超声波测距传感器设置于作业平台,测距传感器设置于作业人员穿戴的穿戴设备,基于测距传感器确定的与障碍物的位置,校准位置关系,包括:
8、根据超声波测距传感器反射并接收到的超声波信号,确定作业人员在作业平台上的位置;
9、利用测距传感器确定作业人员与障碍物的距离;
10、根据作业人员与障碍物的距离以及作业人员在作业平台上的位置,确定作业平台与障碍物的距离;
11、基于作业平台与障碍物的距离,校准位置关系。
12、本申请的实施例中,根据超声波测距传感器反射并接收到的超声波信号,确定作业人员在作业平台上的位置,包括:
13、对超声波测距传感器反射并接收到的超声波信号进行门槛强度滤波,得到滤波后的超声波信号;
14、根据滤波后的超声波信号,确定作业人员在作业平台上的位置。
15、本申请的实施例中,控高空作业设备控制方法还包括:
16、确定作业平台是否位于警示区域内,其中,警示区域为激光雷达对目标区域的检测盲区;
17、在作业平台位于警示区域内的情况下,生成警示信息,其中,警示信息用于提示作业平台处于警示区域内。
18、本申请的实施例中,控高空作业设备控制方法还包括:
19、在作业平台不位于警示区域内,且接收到对作业平台的控制信号的情况下,控制作业平台以第一速度运动;
20、在作业平台位于警示区域内,且接收到对作业平台的控制信号的情况下,控制作业平台以第二速度运动,控制作业平台以第二速度运动,其中,第一速度大于第二速度。
21、本申请的实施例中,确定在三维空间图像中作业平台与障碍物的位置关系包括:
22、建立高空作业设备的三维模型和障碍物的三维模型;
23、基于高空作业设备的三维模型、障碍物的三维模型及三维空间图像,生成高空作业设备的作业场景的三维重建数据;
24、根据三维重建数据,确定高空作业设备与目标区域的距离;
25、基于高空作业设备与目标区域的距离,确定在三维空间图像中作业平台与障碍物的位置关系。
26、本申请的实施例中,控高空作业设备控制方法还包括:
27、将三维重建数据发送至监控设备。
28、本申请的实施例中,高空作业设备还包括语音控制装置,语音装置设置于作业人员穿戴的穿戴设备,高空作业设备控制方法还包括:
29、响应语音装置接收到的语音信号,控制作业平台运动。
30、第二方面,本申请提供一种控制装置,控制装置包括:
31、存储器,被配置成存储指令;以及
32、处理器,被配置成从存储器调用指令以及在执行指令时能够实现根据第一方面的高空作业设备控制方法。
33、第三方面,本申请提供一种高空作业设备,高空作业设备包括:
34、根据第二方面的控制装置;以及
35、作业平台、至少一个激光雷达以及至少一个测距传感器;
36、激光雷达,用于生成目标区域的点云数据;
37、测距传感器,用于确定与目标区域中的障碍物的距离。
38、本申请的实施例中,高空作业设备还包括至少一个超声波测距传感器;
39、超声波测距传感器设置于作业平台,测距传感器设置于作业人员穿戴的穿戴设备;
40、超声波测距传感器,用于反射并接收超声波信号。
41、第四方面,本申请提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据第一方面的高空作业设备控制方法。
42、本申请提供一种高空作业设备控制方法,高空作业设备包括作业平台、至少一个激光雷达以及至少一个测距传感器,高空作业设备控制方法包括:基于激光雷达生成的目标区域的点云数据,构建目标区域的三维空间图像;确定在三维空间图像中作业平台与障碍物的位置关系;基于测距传感器确定的与障碍物的距离,校准位置关系;在作业平台为运动状态,且位置关系为作业平台与障碍物的距离小于预设距离的情况下,控制作业平台停止运动。通过三维图像确定作业平台与障碍物的位置关系,实现了对高空作业设备的作业场景的三维重建。同时,通过位置关系控制作业平台停止运动,避免作业平台与障碍物发生碰撞,进而避免了作业平台上的作业人员受到挤压,提高了高空作业设备的安全性。
技术特征:
1.一种高空作业设备控制方法,其特征在于,所述高空作业设备包括作业平台、至少一个激光雷达以及至少一个测距传感器,所述高空作业设备控制方法包括:
2.根据权利要求1所述的高空作业设备控制方法,其特征在于,所述高空作业设备还包括至少一个超声波测距传感器,所述超声波测距传感器设置于所述作业平台,所述测距传感器设置于所述作业人员穿戴的穿戴设备,所述基于所述测距传感器确定的与所述障碍物的位置,校准所述位置关系,包括:
3.根据权利要求2所述的高空作业设备控制方法,其特征在于,所述根据所述超声波测距传感器反射并接收到的超声波信号,确定所述作业人员在所述作业平台上的位置,包括:
4.根据权利要求1所述的高空作业设备控制方法,其特征在于,所述控高空作业设备控制方法还包括:
5.根据权利要求5所述的高空作业设备控制方法,其特征在于,所述控高空作业设备控制方法还包括:
6.根据权利要求1所述的高空作业设备控制方法,其特征在于,所述确定在所述三维空间图像中所述作业平台与所述障碍物的位置关系包括:
7.根据权利要求6所述的高空作业设备控制方法,其特征在于,所述控高空作业设备控制方法还包括:
8.根据权利要求1所述的高空作业设备控制方法,其特征在于,所述高空作业设备还包括语音控制装置,所述语音装置设置于作业人员穿戴的穿戴设备,所述高空作业设备控制方法还包括:
9.一种控制装置,其特征在于,包括:
10.一种高空作业设备,其特征在于,包括:
11.根据权利要求10所述的高空作业设备,其特征在于,所述高空作业设备还包括至少一个超声波测距传感器;
12.一种机器可读存储介质,其特征在于,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据权利要求1至8中任一项所述的高空作业设备控制方法。
技术总结
本申请公开一种高空作业设备控制方法、控制装置、高空作业设备及介质,涉及设备控制技术领域。高空作业设备包括作业平台、至少一个激光雷达以及至少一个测距传感器,高空作业设备控制方法包括:基于激光雷达生成的目标区域的点云数据,构建目标区域的三维空间图像;确定在三维空间图像中作业平台与障碍物的位置关系;基于测距传感器确定的与障碍物的距离,校准位置关系;在作业平台为运动状态,且位置关系为作业平台与障碍物的距离小于预设距离的情况下,控制作业平台停止运动。同时,通过位置关系控制作业平台停止运动,避免作业平台与障碍物发生碰撞,进而避免了作业平台上的作业人员受到挤压,提高了高空作业设备的安全性。
技术研发人员:田超,沈晓炜,何霁鹏
受保护的技术使用者:湖南中联重科智能高空作业机械有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!