一种基于位置补偿的轮足机器人仿人型步态行走控制方法
本发明属于机器人运动控制领域,具体涉及一种基于位置补偿的轮足机器人仿人型步态行走控制方法。
背景技术:
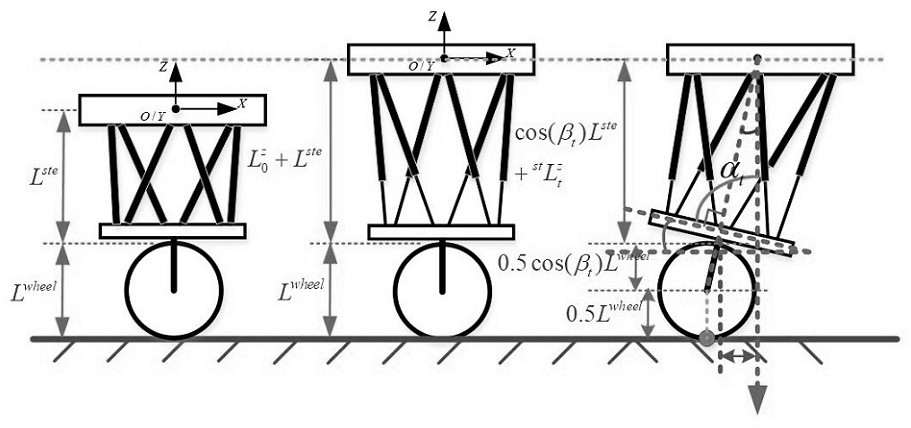
1、轮足机器人具有多样的运动状态和能力、能量利用率高和负载强等特点,在搜索救援、军事领域和工业制造等领域具有广泛的应用,轮足机器人在运动过程中的步态控制是根据下平台期望的位移距离来反解出六个电动缸的伸缩量而实现的,通常为了计算方便,仅考虑下平台的铰点在一个水平面上变化(如图1和图2所示),这就导致上下平台在运动过程中时刻处于水平状态,从而表现得较为“僵硬”,因此导致前进时步距有一定的损失。从仿生学上来看,人在步行的过程中,脚掌和地面并非时刻保持平行。轮足机器人通过模拟人步行时脚掌的运动方式可以降低步距的损失,但其变量较多,因此轮足机器人的仿人型步态行走控制较为困难,难以实现精准控制。
技术实现思路
1、针对上述现有技术中存在的不足,本发明提出了一种基于位置补偿的轮足机器人仿人型步态行走控制方法。
2、为实现上述目的,本发明采用的技术方案如下。
3、一种基于位置补偿的轮足机器人仿人型步态行走控制方法,基于机器人轮足stewart平台实现控制和执行,具体包括以下步骤:
4、步骤(1),根据当前足端位置、步高以及预设足端支撑位置生成一条起点为当前足端位置的贝塞尔曲线,贝塞尔曲线在xoz平面的每一个节点坐标就是摆动相时每一个足端期望位置的x坐标和z坐标,将贝塞尔曲线生成的足端期望位置的x坐标记为b(t)x,将贝塞尔曲线生成的足端期望位置的z坐标记为b(t)z,t表示摆动相时足端期望位置对应的时刻;
5、步骤(2),计算动静平台连线与竖直z方向的夹角χθt:
6、
7、χ=sw,st;
8、式中,χ表示计算支撑相或摆动相时的状态,sw代表计算摆动相时的状态,st代表计算支撑相时的状态;lste表示初始状态下静平台中心到车轮顶端竖直方向长度,lwheel表示车轮直径,表示步高;
9、步骤(3),由于足端俯仰角变化量βt在支撑相和摆动相中都等于对应的夹角χθt,即χβt=χθtχ=sw,st;因此,即可根据步骤(2)中获得的动静平台连线与竖直z方向的夹角χθt计算支撑相动平台x方向位置补偿量和z方向位置补偿量计算公式分别为:
10、
11、
12、同时计算摆动相动平台x方向位置补偿量和z方向位置补偿量计算公式分别为:
13、
14、
15、步骤(4),将步骤(3)中获得的摆动相动平台x方向位置补偿量和z方向位置补偿量通过运动学逆解得到摆动相电动缸的伸缩量,并将摆动相电动缸的伸缩量作为期望值由当前摆动轮足的执行机构执行完成相应的摆动伸腿动作;同时,将步骤(3)中获得的支撑相动平台x方向位置补偿量和z方向位置补偿量通过运动学逆解得到支撑相电动缸的伸缩量,并将支撑相电动缸的伸缩量作为期望值由当前支撑轮足的执行机构执行完成相应的支撑动作;轮足机器人每一条轮足交替进行支撑相与摆动相的动作,从而完成仿人型步态行走。
16、与现有技术相比,本发明的有益效果如下:
17、在轮足机器人行走的过程中运用该改进方法,可以使得摆动过程中,摆动相的动平台能如同人的前脚掌一样与地面水平方向有一定的角度。同时,使得支撑相的动平台能如同人的后脚掌一样与地面竖直方向有一定的角度。通过对支撑相和摆动相的位置补偿可以改变动平面与地面的角度,减轻机器人的“僵直”现象并增大机器人在一次完整步态运动中的步距,以实现仿人型步态行走以及提高能量利用率。此外引入贝塞尔曲线,使摆动相足端轨迹与贝塞尔曲线近似,使得足端加速度变化较为平滑。
技术特征:
1.一种基于位置补偿的轮足机器人仿人型步态行走控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于位置补偿的轮足机器人仿人型步态行走控制方法,其特征在于,步骤(2)中,动静平台连线与竖直z方向的夹角χθt的计算公式为:
3.根据权利要求1所述的基于位置补偿的轮足机器人仿人型步态行走控制方法,其特征在于,步骤(3)中,支撑相动平台x方向位置补偿量和z方向位置补偿量的计算公式分别为:
技术总结
本发明涉及一种基于位置补偿的轮足机器人仿人型步态行走控制方法,先通过贝塞尔曲线给出的足端期望位置的坐标再结合轮足机器人结构尺寸,计算得出动静平台连线与竖直Z方向的夹角,然后计算出支撑相动平台的位置补偿量以及摆动相动平台的位置补偿量;最后通过运动学逆解得到摆动相电动缸的伸缩量、支撑相电动缸的伸缩量,并将摆动相电动缸的伸缩量作为期望值由当前摆动轮足的执行机构执行完成相应的摆动伸腿动作,将支撑相电动缸的伸缩量作为期望值由当前支撑轮足的执行机构执行完成相应的支撑动作;轮足机器人每一条轮足交替进行支撑相与摆动相的动作,从而完成仿人型步态行走。
技术研发人员:黄佳乐,陈志华,薛俊峰,曾文睿,钟永波
受保护的技术使用者:南昌航空大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!