一种无人机跟随拍照的方法及设备与流程
本发明涉及无人机路径规划,尤其是涉及一种无人机跟随拍照的方法及设备。
背景技术:
1、为提高对目标场景巡检效率,减少巡检成本,传统的固定可视化装置已经不能满足人们的需求,对于一些地形恶劣的巡检区域,越来越多的企业、单位开始考虑利用灵活性更强的无人机,因此,无人机在巡检领域具备广阔的发展前景,伴随着无人机在各个领域的应用越来越广泛,自主避障飞行技术、无人机的自主飞行以及无人机与隐患处理的联动也成为了无人机技术领域的重难点问题。
2、中国发明专利名称:一种监拍设备与无人机联动对隐患环绕巡航的方法,申请号:202310693011.1,具体涉及一种监拍设备与无人机联动对隐患环绕巡航的方法,本发明通过分析杆塔上的监拍设备采集到的图片中是否存在隐患,获取隐患图片中隐患目标参考点的经纬度,根据隐患目标参考点的经纬度信息、围绕隐患目标参考点环绕拍摄轨迹的半径r和垂直于隐患目标参考点的拍摄高度h确定环绕拍摄轨迹上各点的经纬度信息从而生成一条无人机的环绕飞行轨迹:根据拍摄隐患图片的监拍设备对应杆塔的位置信息,生成从无人机起点沿杆塔航点到达隐患对应杆塔的曲线飞行轨迹:无人机从无人机起点按照曲线飞行轨迹到达隐患对应杆塔后,对隐患按照环绕飞行轨迹进行巡检,然后再原路返回至无人机起点,进而完成巡检。
3、针对自主避障飞行技术,当前大部分的专利要么需要先进行全局点云数据的采集,要么只处理当前时刻的点云数据,全局点云数据并不能帮助无人机发现实时障碍,而只处理当前时刻扫描到的点云数据仅是对环境比较片面的感知。
技术实现思路
1、针对现有技术中存在的技术问题,本发明提供了一种无人机跟随拍照的方法,本发明以实时定位与建图技术为灵感,提出利用局部拼接的点云数据来实现无人机对当前飞行环境的智能感知,从而提高目前的无人机的自主飞行能力;另外,相比利用视觉传感器设备,本发明采用的激光点云数据能够很好的解决诸如遮挡物难以识别、低光环境下识别困难等问题。
2、本发明采用的技术方案如下:
3、一种无人机跟随拍照的方法,所述方法包括:
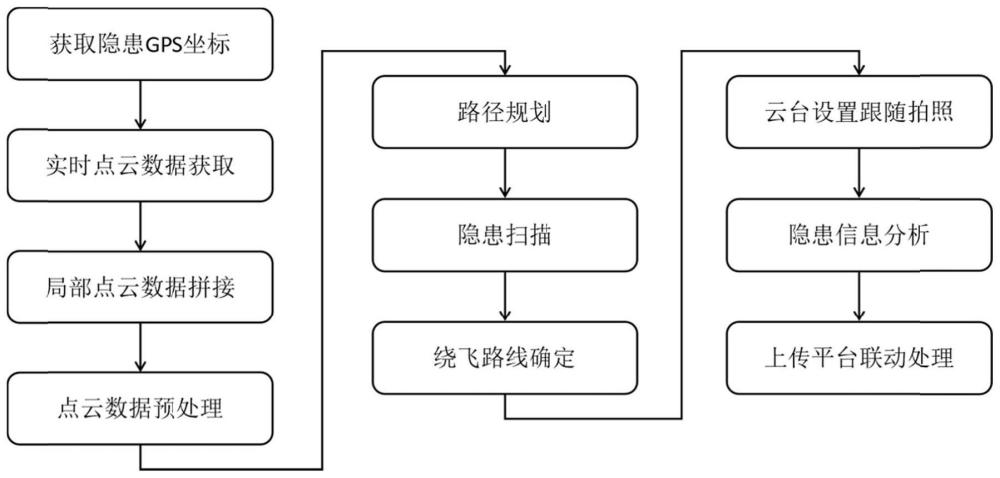
4、s0、获取可视化装置检测到的隐患正上方目标点的gps坐标,将gps坐标定义为第一坐标,获取飞行中的点云数据,对点云数据进行拼接,将拼接后的点云数据记为原始点云数据;
5、s1、基于原始点云数据,以无人机起飞点作为起点,以第一坐标作为终点,利用路径规划算法规划无人机飞行的路线;
6、s2、无人机到达隐患正上方目标点位置后,设置无人机执行x秒的悬停,扫描隐患物体获得点云点数据;
7、s3、遍历点云点数据,结合第一坐标,计算得到隐患物体的最大外接圆半径r和最大外接圆所在位置的高度h,扩大外接圆,扩大后外接圆的半径为r,高度仍为h,计算得到无人机绕飞路线上所有的gps坐标;
8、s4、无人机下降到步骤s3所述绕飞路线上的任意一点,设置无人机逆时针飞行,将云台偏航角向左调整至与无人机机头方向垂直,用于对隐患的跟随拍照;
9、s5、对拍摄的照片进行检测,得到隐患的类别信息,若检测到为车辆隐患,检测绕飞过程中是否有车牌信息,并对车牌区域进行ocr识别,获取车牌号码,并将车牌号码发送至官方平台。
10、一种无人机跟随拍照的设备,包括:
11、数据采集单元,用于获取可视化装置检测到的隐患正上方目标点的gps坐标、飞行中的点云数据;
12、数据处理模块,用于对点云数据进行拼接,计算隐患物体的最大外接圆半径r和最大外接圆所在位置的高度h,计算无人机绕飞路线上所有的gps坐标;
13、路径规划模块,通过路径规划算法规划无人机飞行的路线;
14、拍摄扫描模块,用于扫描隐患物体获得点云点数据,对隐患进行跟随拍照;
15、检测模块,与拍摄扫描模块通信连接,对拍摄的照片进行检测,得到隐患的类别信息;
16、信息传送模块,用于车牌号码上传至官方平台。
17、一种计算机可读存储介质,该计算机可读存储介质被处理器执行时实现无人机跟随拍照的方法。
18、本发明的有益效果为:本发明利用局部拼接的点云数据来实现无人机对当前飞行环境的智能感知,从而提高目前的无人机的自主飞行能力;本发明采用的激光点云数据能够很好的解决诸如遮挡物难以识别、低光环境下识别困难等问题。本发明通过提取隐患特征实现对隐患绕飞的技术方法,通过绕飞提取隐患的车牌或电话等有用信息,反馈到相关单位的管控平台,进行进一步的处理。
技术特征:
1.一种无人机跟随拍照的方法,其特征在于,所述方法包括:
2.如权利要求1所述的无人机跟随拍照的方法,其特征在于,获取飞行中的点云数据,对点云数据进行拼接具体包括:
3.如权利要求2所述的无人机跟随拍照的方法,其特征在于,实时获取无人机当前飞行环境中的点云数据具体为:
4.如权利要求2所述的无人机跟随拍照的方法,其特征在于,对当前时刻及前n-1个时刻构成的n帧点云数据进行拼接,具体为:
5.如权利要求2所述的无人机跟随拍照的方法,其特征在于,对拼接得到的点云数据进行体素滤波处理,具体为:
6.如权利要求1所述的无人机跟随拍照的方法,其特征在于,遍历点云点数据,结合步骤s0中的gps坐标,计算得到隐患物体的最大外接圆半径r和最大外接圆所在位置的高度h,具体为:
7.如权利要求1所述的无人机跟随拍照的方法,其特征在于,结合步骤s0中的gps坐标,计算得到无人机绕飞路线的gps坐标,具体为:
8.如权利要求7所述的无人机跟随拍照的方法,其特征在于,计算外接圆圆周上点的经度和纬度具体为:
9.一种无人机跟随拍照的设备,其特征在于,包括:
10.一种计算机可读存储介质,所述存储介质上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-8任一项无人机跟随拍照的方法。
技术总结
一种无人机跟随拍照的方法及设备,所述方法包括:获取GPS坐标、飞行中的点云数据,对点云数据进行拼接;规划无人机继续飞行的路线;无人机到达隐患正上方目标点位置后,设置无人机执行x秒的悬停,通过激光雷达对隐患物体扫描;遍历点云点数据,计算得到无人机绕飞路线的GPS坐标;无人机对隐患的跟随拍照;对拍摄的照片进行检测,得到隐患的类别信息,若检测到为车辆隐患,则检测绕飞过程中是否有车牌信息,并对车牌区域进行OCR识别,获取车牌号码,并将车牌号码发送至官方平台。本发明提出利用局部拼接的点云数据来实现无人机对当前飞行环境的智能感知,提高无人机的自主飞行能力。
技术研发人员:吴晗,张悦,王建岭,范满,李小龙
受保护的技术使用者:智洋创新科技股份有限公司
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!