基于参考引导方向的回充控制方法与流程
本申请涉及机器人控制的,具体涉及基于参考引导方向的回充控制方法。
背景技术:
1、充电引导信号是由充电桩上的发射传感器扇射而出,多个位置的发射传感器的发射探头对应会出射形成一定范围的信号分布图,可以划分为中间信号、左信号和右信号,这时候充电桩的两侧面会设置边左发射传感器和边右发射传感器,弥补探测盲区。常规的扫地机器人会专门装配有2~6个信号接收头,所以,扫地机器人会产生非常多种信号接收情况,例如,中间信号分为中左信号和中右信号后形成的对位信号重叠区域没有居中(可能是充电桩内部的基站结构设计导致红外信号在基站内部反射,引起重叠区域歪斜)、边左发射传感器和边右发射传感器发射的信号会出现越界现象、充电桩在一规则形状区域内发射形成的信号分布疏密不一致等等,导致均匀分布的单元格区域内标记的充电信息不固定,则在按照所述充电引导信号的引导进行回座的过程中增大充电引导信号的探索和运用复杂度,也引发大量不稳定的运动控制业务逻辑,增加人为训练机器人回充的时间和精力。
技术实现思路
1、本申请公开基于参考引导方向的回充控制方法,具体的技术方案如下:
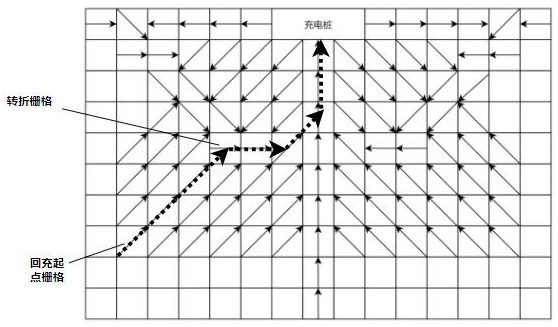
2、基于参考引导方向的回充控制方法,包括:步骤a、基于充电桩发射的充电引导信号,在预先设置的栅格地图内为对应的栅格设置参考引导方向和引导优先级;然后进入步骤b;步骤b、根据相邻两个栅格中的参考引导方向之间的指向关系,调整相邻两个栅格当中引导优先级相对低的栅格中的参考引导方向,再在同一个栅格中将调整后的参考引导方向更新为所述参考引导方向;然后进入步骤c;步骤c、从预先设置的回充起点栅格开始,基于栅格中的参考引导方向控制机器人向所述充电桩行走,使机器人行走至与所述充电桩对接充电的位置。与现有技术相比,本申请在预先设置的栅格地图内为对应的栅格设置参考引导方向和引导优先级,并依据相邻两个栅格中的参考引导方向之间的指向关系对引导优先级较低的栅格中的参考引导方向进行调整以趋近于指向所述充电桩所在栅格区域,在此基础上实现通过栅格中的参考引导方向将回充信号信息固定在信号覆盖的栅格区域内,量化为方向元素(成为单个栅格对应位置中的唯一变量);则以方向元素为回充指引参考并根据参考引导方向对应的指向控制机器人行走向所述充电桩,简化并固定好回充逻辑,减少对充电引导信号的探索和运用复杂度;进而让机器人基于既定的栅格中的参考引导方向自主训练以摸索出回充路线,减少人为干涉,节省研发成本和劳动力。
技术特征:
1.基于参考引导方向的回充控制方法,其特征在于,包括:
2.根据权利要求1所述回充控制方法,其特征在于,在步骤a中,所述基于充电桩发射的充电引导信号,在预先设置的栅格地图内为对应的栅格设置参考引导方向和引导优先级的方法包括:
3.根据权利要求2所述回充控制方法,其特征在于,所述基于充电桩的前侧中间的垂直向前方向设置第一引导栅格,并在第一引导栅格中设置第一参考引导方向的方法包括:
4.根据权利要求3所述回充控制方法,其特征在于,所述根据充电桩发射的近卫信号的覆盖范围设置第二引导栅格,并在第二引导栅格中设置第二参考引导方向的方法包括:
5.根据权利要求4所述回充控制方法,其特征在于,若所述充电桩所在栅格区域在所述栅格地图内是按行分布成一行栅格区域,则所述充电桩所在栅格区域左侧的第二引导栅格和所述充电桩所在栅格区域右侧的第二引导栅格均分布在与所述充电桩所在栅格区域的行序相同的栅格区域内;而且,所述多个第一引导栅格组成的栅格区域在所述栅格地图内是按列分布成一列栅格区域,则所述多个第一引导栅格组成的栅格区域左侧的第二引导栅格和所述多个第一引导栅格组成的栅格区域右侧的第二引导栅格均分布在与部分第一引导栅格的行序相同的栅格区域内;其中,栅格区域左侧对应于栅格地图的二维坐标系的横坐标轴负方向,栅格区域右侧对应于栅格地图的二维坐标系的横坐标轴正方向,行序在栅格地图的二维坐标系内使用纵坐标表示,列序在栅格地图的二维坐标系内使用横坐标表示;
6.根据权利要求4所述回充控制方法,其特征在于,所述根据对位信号的有效探测范围设置第三引导栅格,并在第三引导栅格中设置第三参考引导方向的方法包括:
7.根据权利要求6所述回充控制方法,其特征在于,若所述充电桩所在栅格区域在所述栅格地图内是按行分布成一行栅格区域,则所述充电桩所在栅格区域左侧的第三引导栅格和所述充电桩所在栅格区域右侧的第三引导栅格均分布在与所述充电桩所在栅格区域的行序相同和行序相邻的栅格区域内;而且,所述多个第一引导栅格组成的栅格区域在所述栅格地图内是按列分布成一列栅格区域,则所述多个第一引导栅格组成的栅格区域左侧的第三引导栅格和所述多个第一引导栅格组成的栅格区域右侧的第三引导栅格均分布在与部分第一引导栅格的行序相同的栅格区域内;其中,栅格区域左侧对应于栅格地图的二维坐标系的横坐标轴负方向,栅格区域右侧对应于栅格地图的二维坐标系的横坐标轴正方向,行序在栅格地图的二维坐标系内使用纵坐标表示,列序在栅格地图的二维坐标系内使用横坐标表示;
8.根据权利要求6所述回充控制方法,其特征在于,将所述第二一参考引导方向设置为与其所在的第二引导栅格的对角线平行,并将所述第二二参考引导方向设置为与所述第一参考引导方向垂直;
9.根据权利要求8所述回充控制方法,其特征在于,将所述第一参考引导方向设置为经过其所在的第一引导栅格的中心且垂直于第一引导栅格的一边界;
10.根据权利要求8所述回充控制方法,其特征在于,在步骤b中,所述根据相邻两个栅格中的参考引导方向之间的指向关系,调整相邻两个栅格当中引导优先级相对低的栅格中的参考引导方向的方法包括:
11.根据权利要求10所述回充控制方法,其特征在于,所述相邻两个栅格是位于同一列或位于同一行的一个第二引导栅格和一个第三引导栅格的情况下,若所述相邻两个栅格中的参考引导方向在所处的栅格内均指向同一栅格边界的中点位置,则确定所述相邻两个栅格中的参考引导方向对冲;
12.根据权利要求11所述回充控制方法,其特征在于,所述多个第一引导栅格和充电桩所在栅格区域一起组成的栅格区域的左侧内,所述根据相邻两个栅格中的参考引导方向之间的指向关系,调整相邻两个栅格当中引导优先级相对低的栅格中的参考引导方向的方法的方法包括:
13.根据权利要求11所述回充控制方法,其特征在于,所述多个第一引导栅格和充电桩所在栅格区域一起组成的栅格区域的右侧内,所述根据相邻两个栅格中的参考引导方向之间的指向关系,调整相邻两个栅格当中引导优先级相对低的栅格中的参考引导方向的方法的方法包括:
14.根据权利要求12或13所述回充控制方法,其特征在于,在所述步骤c中,从预先设置的回充起点栅格开始,基于栅格中的参考引导方向控制机器人向所述充电桩行走,使机器人行走至与所述充电桩对接充电的位置的方法包括:
15.根据权利要求14所述回充控制方法,其特征在于,在执行所述步骤c2至步骤c4中,所述按照回充起点栅格中的参考引导方向确定下一个栅格的方法包括:
技术总结
本申请公开基于参考引导方向的回充控制方法,包括:步骤A、基于充电桩发射的充电引导信号,在预先设置的栅格地图内为对应的栅格设置参考引导方向和引导优先级;然后进入步骤B;步骤B、根据相邻两个栅格中的参考引导方向之间的指向关系,调整相邻两个栅格当中引导优先级相对低的栅格中的参考引导方向,再在同一个栅格中将调整后的参考引导方向更新为所述参考引导方向;然后进入步骤C;步骤C、从预先设置的回充起点栅格开始,基于栅格中的参考引导方向控制机器人向所述充电桩行走,使机器人行走至与所述充电桩对接充电的位置。实现通过栅格中的参考引导方向将回充信号信息固定在信号覆盖的栅格区域内,简化并固定好回充逻辑。
技术研发人员:廖受坚,唐伟华
受保护的技术使用者:珠海一微半导体股份有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!