面向大规模无人机集群的网络拓扑控制方法和系统
本发明涉及无人机,尤其涉及面向大规模无人机集群的网络拓扑控制方法和系统。
背景技术:
1、无人机集群是指由多台无人机组成的一个协同工作系统,通过集体行动来完成特定任务。为了实现无人机集群的高效协作和任务完成,拓扑控制成为核心关键,其主要包括群体无人机通信、分布式拓扑规划、动态拓扑调整、拓扑优化算法和自组织网络等方面内容。
2、无人机集群需要进行高效的通信和协作,以实现任务的分配和协同操作。然而,大规模无人机集群通常由数十个甚至上百个无人机节点组成,每个节点都具有独立的感知、决策和执行能力,属于高度复杂的系统,集群的控制和协调较为困难。
3、同时,在大规模无人机集群中,通信资源是有限的,无人机之间存在资源竞争和冲突,最大程度提高集群的性能和效率,避免资源冲突和无意义的消耗仍是亟待解决的难题。
4、综上所述,当前现有技术缺少能够实现高效通信协作的无人机拓扑管理方法,在通信资源管理上仍存在一定的冗余耗费,难以实现大规模无人机集群的高效协作。
技术实现思路
1、有鉴于此,本发明提出面向大规模无人机集群的网络拓扑控制方法和系统,可支持大规模无人机集群的拓扑控制,提高无人机网络的通信效率,提升网络的容错和鲁棒性,能够适应多种无人机场景。
2、本发明的一实施例提出面向大规模无人机集群的网络拓扑控制方法,包括:
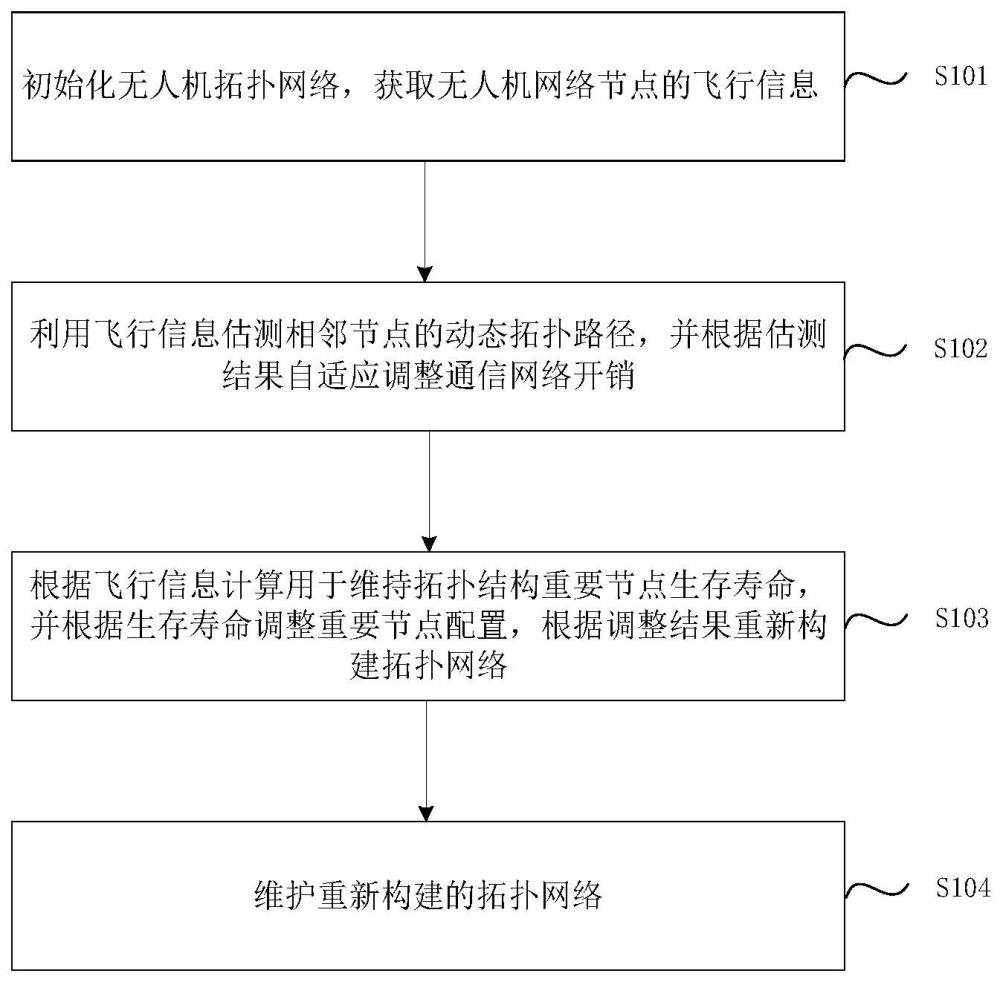
3、初始化无人机拓扑网络,获取无人机网络节点的飞行信息;
4、利用所述飞行信息估测相邻节点的动态拓扑路径,并根据估测结果自适应调整通信网络开销;
5、根据所述飞行信息计算用于维持拓扑结构的重要节点生存寿命,并根据所述生存寿命调整重要节点配置,根据调整结果重新构建拓扑网络;
6、维护重新构建的拓扑网络。
7、示例性地,所述无人机网络节点的飞行信息包括无人机电量、三维位置、速度、高度和航向,所述重要节点包括用于指挥和控制其他无人机节点的支配节点和用于在网络中进行数据传输的连通节点。
8、示例性地,所述利用所述飞行信息估测相邻节点的动态拓扑路径,并根据估测结果自适应调整通信网络开销包括:
9、建立无人机飞行模型,通过所述无人机飞行模型求解无人机在三维方向上的分速度,并计算相邻节点的平均位移速度;
10、利用马尔科夫算法估测不同时间尺度相邻节点的飞行位置信息,并对不同时间尺度结果进行权重赋值,得到连续时间窗口期内的相邻节点的所述动态拓扑路径;
11、根据所述动态拓扑路径的变化情况调整通信网络开销。
12、示例性地,所述动态拓扑路径的变化情况包括相对远离、相对靠近和相对不变,所述根据所述动态拓扑路径的变化情况调整通信网络开销包括:
13、判断相邻节点的位置是否相对不变;
14、若是,则预测链路持续时间,并根据持续时间长短减少通信网络的开销,若不是,则增加通信网络的开销。
15、示例性地,所述根据所述飞行信息计算用于维持拓扑结构的重要节点生存寿命,并根据所述生存寿命调整重要节点配置,根据调整结果重新构建拓扑网络包括:
16、根据第一验证规则选定支配节点,所述第一验证规则通过一跳邻居节点数量、无人机电量和所述预测链路持续时间计算支配节点配置值;
17、基于支配节点的配置结果,在邻居节点中根据第二验证规则选定连通节点或根据第三验证规则验证本节点是否为一般节点;
18、在本节点不是所述一般节点的情况下,验证是否有邻居节点为支配节点且设定自身为连通节点;
19、如果有,则将节点配置为所述连通节点。
20、示例性地,所述基于支配节点的配置结果,在邻居节点中根据第二验证规则选定连通节点或根据第三验证规则验证本节点是否为一般节点包括:
21、当节点被选定为所述支配节点时,则根据所述第二验证规则选定相邻节点中的连通节点,其中,所述第二验证规则通过将相邻节点的支配节点配置值按照大小排序进行所述连通节点的选定;
22、当节点未被选定为所述支配节点时,则根据所述第三验证规则验证本节点是否为所述一般节点,在所述第三验证规则下任意两个相邻节点均可相互连接。
23、本发明的另一实施例提出面向大规模无人机集群的网络拓扑控制系统,包括:
24、获取单元,用于初始化无人机拓扑网络,获取无人机网络节点的飞行信息;
25、路径估测单元,用于利用所述飞行信息估测相邻节点的动态拓扑路径,并根据估测结果自适应调整通信网络开销;
26、拓扑构建单元,用于根据所述飞行信息计算用于维持拓扑结构的重要节点生存寿命,并根据所述生存寿命调整重要节点配置,根据调整结果重新构建拓扑网络;
27、拓扑维护单元,用于维护重新构建的拓扑网络。
28、本发明提出面向大规模无人机集群的网络拓扑控制方法和系统,包括:初始化无人机拓扑网络,获取无人机网络节点的飞行信息;利用飞行信息估测相邻节点的动态拓扑路径,并根据估测结果自适应调整通信网络开销;根据飞行信息计算用于维持拓扑结构的重要节点生存寿命,并根据生存寿命调整重要节点配置,并根据调整结果重新构建拓扑网络;维护重新构建的拓扑网络。相对于现有技术而言,本发明的技术方案可支持大规模无人机集群的拓扑控制,提高无人机网络的通信效率,提升网络的容错和鲁棒性,能够适应多种无人机场景。
技术特征:
1.一种面向大规模无人机集群的网络拓扑控制方法,其特征在于,包括:
2.根据权利要求1所述的面向大规模无人机集群的网络拓扑控制方法,其特征在于,所述无人机网络节点的飞行信息包括无人机电量、三维位置、速度、高度和航向,所述重要节点包括用于指挥和控制其他无人机节点的支配节点和用于在网络中进行数据传输的连通节点。
3.根据权利要求2所述的面向大规模无人机集群的网络拓扑控制方法,其特征在于,所述利用所述飞行信息估测相邻节点的动态拓扑路径,并根据估测结果自适应调整通信网络开销包括:
4.根据权利要求3所述的面向大规模无人机集群的网络拓扑控制方法,其特征在于,所述动态拓扑路径的变化情况包括相对远离、相对靠近和相对不变,所述根据所述动态拓扑路径的变化情况调整通信网络开销包括:
5.根据权利要求4所述的面向大规模无人机集群的网络拓扑控制方法,其特征在于,所述根据所述飞行信息计算用于维持拓扑结构的重要节点生存寿命,并根据所述生存寿命调整重要节点配置,根据调整结果重新构建拓扑网络包括:
6.根据权利要求5所述的面向大规模无人机集群的网络拓扑控制方法,其特征在于,所述基于支配节点的配置结果,在邻居节点中根据第二验证规则选定连通节点或根据第三验证规则验证本节点是否为一般节点包括:
7.一种面向大规模无人机集群的网络拓扑控制系统,其特征在于,包括:
技术总结
本发明提出面向大规模无人机集群的网络拓扑控制方法和系统,包括:初始化无人机拓扑网络,获取无人机网络节点的飞行信息;利用飞行信息估测相邻节点的动态拓扑路径,并根据估测结果自适应调整通信网络开销;根据飞行信息计算用于维持拓扑结构的重要节点生存寿命,并根据生存寿命调整重要节点配置,并根据调整结果重新构建拓扑网络;维护重新构建的拓扑网络。相对于现有技术而言,本发明的技术方案可支持大规模无人机集群的拓扑控制,提高无人机网络的通信效率,提升网络的容错和鲁棒性,能够适应多种无人机场景。
技术研发人员:孙子琛,陈桂芬
受保护的技术使用者:长春理工大学
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!