一种室内复杂环境下轮腿机器人路径规划方法与系统
本发明涉及非电变量的控制或调节领域,特别是涉及一种室内复杂环境下轮腿机器人路径规划方法与系统。
背景技术:
1、轮腿机器人具有多模态运动能力,可以实现复杂环境的导航,满足多元化任务需要。并且机器人路径规划作为实现自主能力的一个重要环节,有广阔的发展空间。机器人在3d空间地形中的运动、探索与规划极具挑战。这些挑战首先是机器人自身,机器人需要保护自身免受碰撞、损坏或过度应力的影响,路径规划算法需要考虑轮腿机器人的尺寸、形状和动力学特性,以确保机器人能够安全地移动;其次是复杂环境,机器人需要避免与环境中的障碍物、墙壁或其他物体发生碰撞,计算出通过它们的最佳路径;最后是算力需求,在3d空间内的探索信息量大,所需算力大。
2、当前机器人的室内导航过程大多约束在二维平面内,而轮腿机器人具有较强机动能力,能够打破在平面内运动的约束,可以通过台阶、斜坡等地形。现有采用的轮腿机器人路径规划方法一般采用传统3d栅格地图路径规划的方式,这种方法需要搜索的范围大,算力要求高,实时性差,难以在真实环境下部署算法。并且考虑到环境内复杂空间,包含台阶等地形的轨迹生成具有挑战性。
技术实现思路
1、为解决现有技术存在的上述问题,本发明提供了一种室内复杂环境下轮腿机器人路径规划方法与系统。
2、为实现上述目的,本发明提供了如下方案。
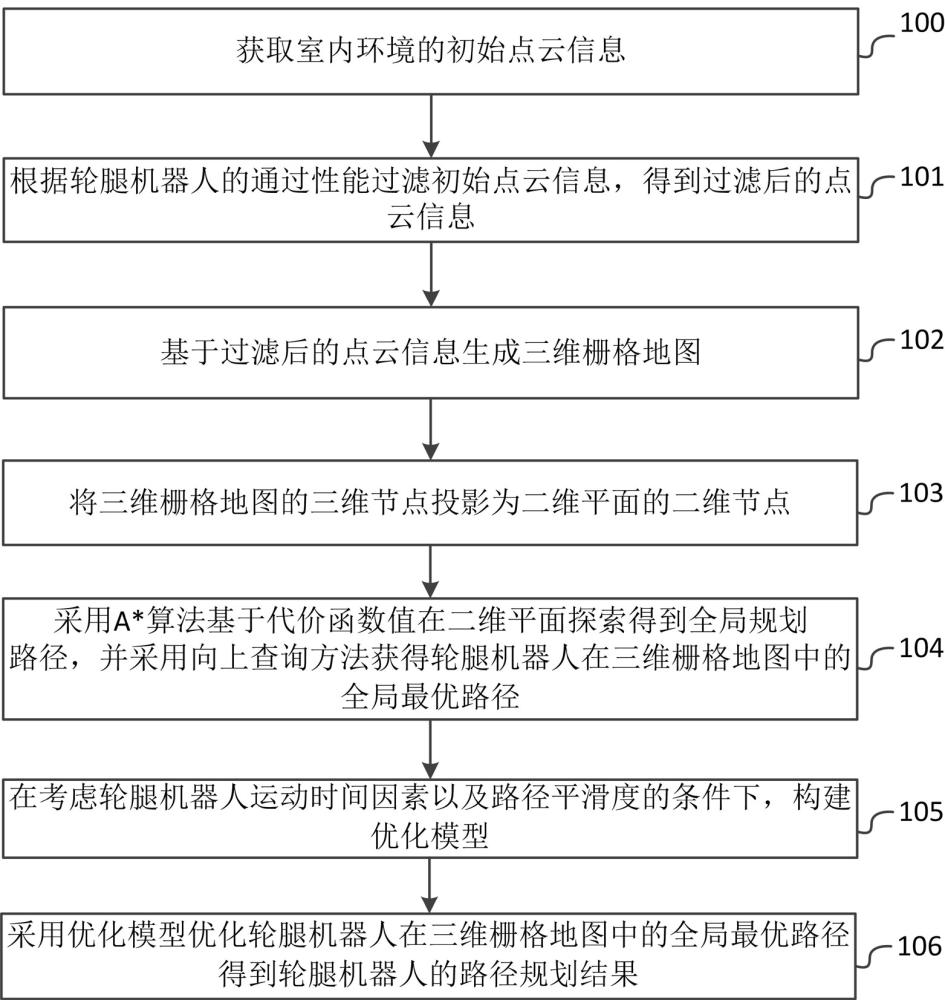
3、一种室内复杂环境下轮腿机器人路径规划方法,包括:获取室内环境的初始点云信息。
4、根据轮腿机器人的通过性能过滤所述初始点云信息,得到过滤后的点云信息。
5、基于过滤后的点云信息生成三维栅格地图;所述三维栅格地图中的每一三维节点的节点信息均包括节点坐标信息以及用于路径规划的代价函数值。
6、将所述三维栅格地图的三维节点投影为二维平面的二维节点。
7、采用算法基于所述代价函数值在二维平面探索得到全局规划路径,并采用向上查询方法获得轮腿机器人在三维栅格地图中的全局最优路径。
8、在考虑轮腿机器人运动时间因素以及路径平滑度的条件下,构建优化模型。
9、采用所述优化模型优化轮腿机器人在三维栅格地图中的全局最优路径得到轮腿机器人的路径规划结果。
10、可选地,根据轮腿机器人的通过性能过滤所述初始点云信息,得到过滤后的点云信息,具体包括:以轮腿机器人的质心为圆心,生成设定半径的圆圈。
11、以地面为基准,采用所述圆圈按照轮腿机器人的行驶方向对所述初始点云信息进行滚动过滤,以过滤掉圆圈范围内垂直地面方向的点云信息以及超出轮腿机器人越障能力的点云信息,得到过滤后的点云信息。
12、可选地,将轮腿机器人步态的最高跨越高度值作为所述设定半径。
13、可选地,用于路径规划的代价函数值的确定公式为:。
14、式中,为第个节点用于路径规划的代价函数值,从起始节点到第个节点的代价函数值,为从第个节点到目标节点的最小路径代价的启发式函数值。
15、可选地,采用算法基于所述代价函数值在二维平面探索得到全局规划路径,并采用向上查询方法获得轮腿机器人在三维栅格地图中的全局最优路径,具体包括:在二维平面中,设置未探索节点,将轮腿机器人的当前位置作为初始节点,采用算法从所述初始节点向目标节点进行探索,在每一步探索过程中,选取未探索节点中代价函数值最小的节点,当未探索节点中代价函数值最小的节点在目标节点的限定区域内时,在所述三维栅格地图中查询得到与未探索节点中代价函数值最小的节点所对应的三维节点,连接查询得到的三维节点,得到轮腿机器人在三维栅格地图中的全局最优路径。
16、可选地,所述优化模型为:。
17、式中,为三维节点的路径总代价,为三维节点的时间代价,为三维节点的路径平滑度,为时间代价的权重,为路径平滑度的权重,min表示取最小值。
18、可选地,采用激光雷达采集室内环境的初始点云信息。
19、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明根据轮腿机器人的通过性能过滤所述初始点云信息,能够极大降低算力需求,提升路径可行性。并且,本发明采用算法基于投影得到的二维平面以及三维栅格地图,实现轮腿机器人的全局规划路径的生成,能够将轮腿机器人在3d环境下的路径规划问题简化为在2d平面内的规划问题,大大减少了搜索节点,极大地提升了路径规划效率。最后采用优化模型对全局规划路径进行优化,以得到轮腿机器人在室内复杂环境下的最佳路径,能够进一步保证运动路径的平滑度。
20、进一步,本发明还提供了一种室内复杂环境下轮腿机器人路径规划系统,该系统包括:激光雷达、存储器和处理器。
21、激光雷达,用于采集室内环境的初始点云信息。
22、存储器,用于存储计算机程序;所述计算机程序用于实施上述提供的室内复杂环境下轮腿机器人路径规划方法。
23、处理器,分别与所述激光雷达和所述存储器连接,用于调取并执行所述计算机程序,以基于所述初始点云信息得到轮腿机器人的路径规划结果。
24、可选地,所述激光雷达、所述存储器和所述处理器均设置在所述轮腿机器人上。
25、可选地,所述处理器包括:点云信息获取模块、点云信息过滤模块、三维地图构建模块、二维地图投影模块、全局路径生成模块、优化模型构建模块和路径结果优化模块。
26、点云信息获取模块,用于获取室内环境的初始点云信息。
27、点云信息过滤模块,用于根据轮腿机器人的通过性能过滤所述初始点云信息,得到过滤后的点云信息。
28、三维地图构建模块,用于基于过滤后的点云信息生成三维栅格地图;所述三维栅格地图中的每一三维节点的节点信息均包括节点坐标信息以及用于路径规划的代价函数值。
29、二维地图投影模块,用于将所述三维栅格地图的三维节点投影为二维平面的二维节点。
30、全局路径生成模块,用于采用算法基于所述代价函数值在二维平面探索得到全局规划路径,并采用向上查询方法获得轮腿机器人在三维栅格地图中的全局最优路径。
31、优化模型构建模块,用于在考虑轮腿机器人运动时间因素以及路径平滑度的条件下,构建优化模型。
32、路径结果优化模块,用于采用所述优化模型优化轮腿机器人在三维栅格地图中的全局最优路径得到轮腿机器人的路径规划结果。
33、因本发明提供的系统实现的技术效果与本发明上述提供的室内复杂环境下轮腿机器人路径规划方法实现的效果相同,故在此不再进行赘述。
技术特征:
1.一种室内复杂环境下轮腿机器人路径规划方法,其特征在于,包括:
2.根据权利要求1所述的室内复杂环境下轮腿机器人路径规划方法,其特征在于,根据轮腿机器人的通过性能过滤所述初始点云信息,得到过滤后的点云信息,具体包括:
3.根据权利要求2所述的室内复杂环境下轮腿机器人路径规划方法,其特征在于,将轮腿机器人步态的最高跨越高度值作为所述设定半径。
4.根据权利要求1所述的室内复杂环境下轮腿机器人路径规划方法,其特征在于,用于路径规划的代价函数值的确定公式为:
5.根据权利要求1所述的室内复杂环境下轮腿机器人路径规划方法,其特征在于,采用算法基于所述代价函数值在二维平面探索得到全局规划路径,并采用向上查询方法获得轮腿机器人在三维栅格地图中的全局最优路径,具体包括:
6.根据权利要求1所述的室内复杂环境下轮腿机器人路径规划方法,其特征在于,所述优化模型为:
7.根据权利要求1所述的室内复杂环境下轮腿机器人路径规划方法,其特征在于,采用激光雷达采集室内环境的初始点云信息。
8.一种室内复杂环境下轮腿机器人路径规划系统,其特征在于,所述系统包括:
9.根据权利要求8所述的室内复杂环境下轮腿机器人路径规划系统,其特征在于,所述激光雷达、所述存储器和所述处理器均设置在所述轮腿机器人上。
10.根据权利要求8所述的室内复杂环境下轮腿机器人路径规划系统,其特征在于,所述处理器包括:
技术总结
本发明公开一种室内复杂环境下轮腿机器人路径规划方法与系统,涉及非电变量的控制或调节领域。本发明根据轮腿机器人的通过性能过滤初始点云信息,能够极大降低算力需求,提升路径可行性。并且,本发明采用算法基于投影得到的二维平面以及三维栅格地图,实现轮腿机器人的全局规划路径的生成,能够将轮腿机器人在3D环境下的路径规划问题简化为在2D平面内的规划问题,大大减少了搜索节点,极大地提升了路径规划效率。最后采用优化模型对全局规划路径进行优化,以得到轮腿机器人在室内复杂环境下的最佳路径,能够进一步保证运动路径的平滑度。
技术研发人员:张一帆,刘辉,韩立金,谢景硕,侯泓钰,廖登廷
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!