一种无尾布局飞行器的三轴耦合增稳控制方法和装置与流程
本公开涉及飞行器控制设计,尤其涉及一种无尾布局飞行器的三轴耦合增稳控制方法、装置、存储介质及电子设备。
背景技术:
1、无尾布局飞行器取消尾翼后,航向呈弱静不稳定,三轴稳定性下降,其本体运动模态特性通常较差。此外,无尾布局飞行器一般采用多组升降副翼和阻力式舵面组合的舵面配置方案,以满足操纵效能的需求。然而阻力式舵面在操纵时存在明显的三轴力和力矩耦合效应,将进一步造成飞行器动态响应特性的下降。因此必须依赖良好的飞行控制律设计,才能保证无尾布局飞行器获得优良的飞行特性,实现可控飞行。
2、目前针对常规布局飞行器开展飞行控制设计时,通常将纵向和横航向通道分开进行设计,不考虑飞行器纵向和横航向之间的运动耦合和操纵耦合。对于无尾布局飞行器,如果忽略阻力式舵面的三轴操纵耦合效应,仍采用纵向和横航向分开的控制设计方法,则无法实现有效的飞行器三轴运动响应及操纵解耦,飞行器闭环响应较差。
技术实现思路
1、本公开实施例的目的在于提供一种无尾布局飞行器的三轴耦合增稳控制方法、装置、存储介质及电子设备,用以解决现有技术中无尾布局飞行器三轴运动耦合和阻力式舵面偏转时的三轴操纵耦合的问题。
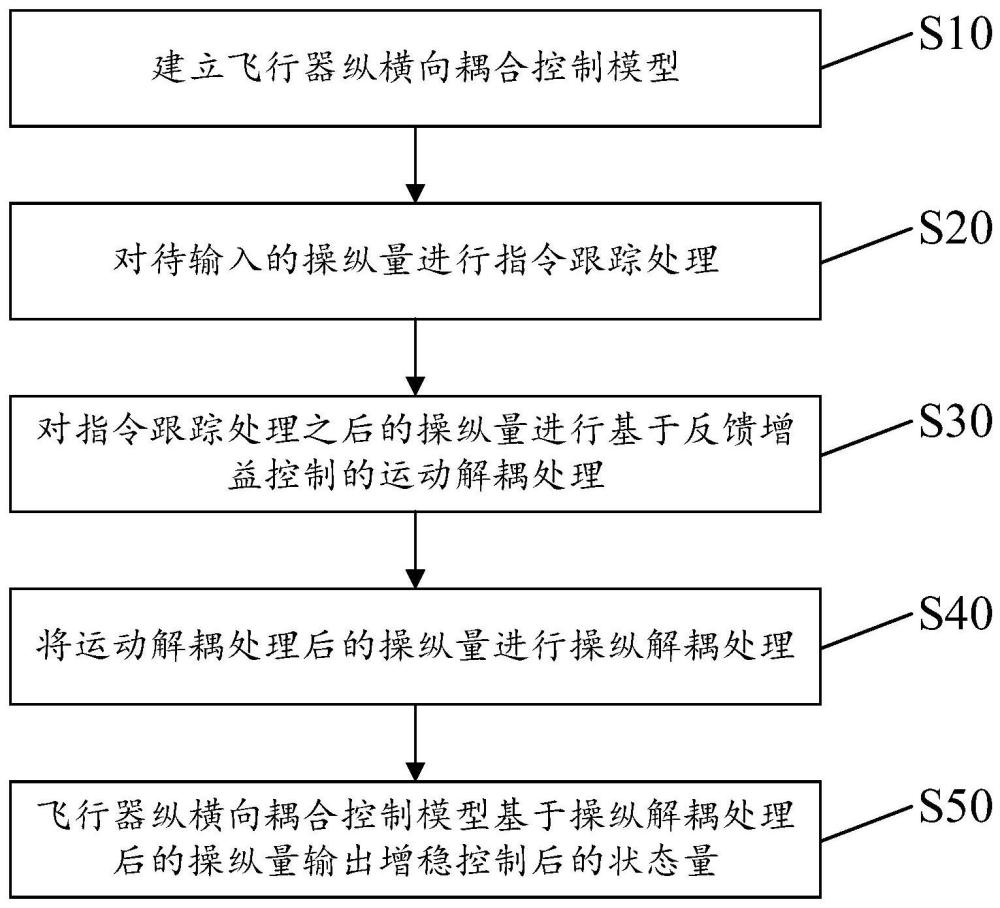
2、本公开的实施例采用如下技术方案:一种无尾布局飞行器的三轴耦合增稳控制方法,包括:建立飞行器纵横向耦合控制模型,所述飞行器纵横向耦合控制模型以飞行器三轴上的操纵量为输入,以飞行器的状态量为输出;对待输入的操纵量进行指令跟踪处理;对指令跟踪处理之后的操纵量进行基于反馈增益控制的运动解耦处理;将运动解耦处理后的操纵量进行操纵解耦处理;所述飞行器纵横向耦合控制模型基于操纵解耦处理后的操纵量输出增稳控制后的状态量。
3、本公开实施例还提供了一种无尾布局飞行器的三轴耦合增稳控制装置,包括:控制模型建立模块,用于建立飞行器纵横向耦合控制模型,所述飞行器纵横向耦合控制模型以飞行器三轴上的操纵量为输入,以飞行器的状态量为输出;指令跟踪模块,用于对待输入的操纵量进行指令跟踪处理;反馈增益模块,用于对指令跟踪处理之后的操纵量进行基于反馈增益控制的运动解耦处理;操纵解耦模块,用于将运动解耦处理后的操纵量进行操纵解耦处理;所述飞行器纵横向耦合控制模型基于操纵解耦处理后的操纵量输出增稳控制后的状态量。
4、本公开实施例还提供了一种存储介质,存储有计算机程序,其特征在于,述计算机程序被处理器执行时实现上述的无尾布局飞行器的三轴耦合增稳控制方法的步骤。
5、本公开实施例还提供了一种电子设备,至少包括存储器、处理器,所述存储器上存储有计算机程序,所述处理器在执行所述存储器上的计算机程序时实现上述的无尾布局飞行器的三轴耦合增稳控制方法的步骤。
6、本公开实施例的有益效果在于:通过指令跟踪处理和反馈增益控制的“软”交联方式实现无尾布局飞行器的运动解耦处理,通过对阻力式舵面操纵量前馈输入至其他通道的“硬”交联方式实现无尾布局飞行器的操纵解耦处理,解决现有技术中无尾布局飞行器三轴运动耦合和阻力式舵面偏转时的三轴操纵耦合的问题,更好地满足飞行器飞行任务的要求。
技术特征:
1.一种无尾布局飞行器的三轴耦合增稳控制方法,其特征在于,包括:
2.根据权利要求1所述的三轴耦合增稳控制方法,其特征在于,所述对指令跟踪处理之后的操纵量进行基于反馈增益控制的运动解耦处理,包括:
3.根据权利要求2所述的三轴耦合增稳控制方法,其特征在于,所述对待输入的操纵量进行指令跟踪处理,包括:
4.根据权利要求2所述的三轴耦合增稳控制方法,其特征在于,在将运动解耦处理后的操纵量进行操纵解耦处理之前,还包括:
5.根据权利要求2所述的三轴耦合增稳控制方法,其特征在于,所述基于反馈增益控制矩阵k将飞行器纵横向耦合控制模型输出的状态量中的横航向状态量输入至纵向通道,以实现运动解耦,包括:
6.根据权利要求1至5中任一项所述的三轴耦合增稳控制方法,其特征在于,所述将运动解耦处理后的操纵量进行操纵解耦处理,包括:
7.一种无尾布局飞行器的三轴耦合增稳控制装置,其特征在于,包括:
8.根据权利要求7所述的三轴耦合增稳控制装置,其特征在于,还包括:
9.一种存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的无尾布局飞行器的三轴耦合增稳控制方法的步骤。
10.一种电子设备,至少包括存储器、处理器,所述存储器上存储有计算机程序,其特征在于,所述处理器在执行所述存储器上的计算机程序时实现权利要求1至6中任一项所述的无尾布局飞行器的三轴耦合增稳控制方法的步骤。
技术总结
本公开提供了一种无尾布局飞行器的三轴耦合增稳控制方法和装置,方法包括:建立飞行器纵横向耦合控制模型,飞行器纵横向耦合控制模型以飞行器三轴上的操纵量为输入,以飞行器的状态量为输出;对待输入的操纵量进行指令跟踪处理;对指令跟踪处理之后的操纵量进行基于反馈增益控制的运动解耦处理;将运动解耦处理后的操纵量进行操纵解耦处理;飞行器纵横向耦合控制模型基于操纵解耦处理后的操纵量输出增稳控制后的状态量。本公开通过指令跟踪处理和反馈增益控制的“软”交联方式实现无尾布局飞行器的运动解耦处理,通过对阻力式舵面操纵量前馈输入至其他通道的“硬”交联方式实现无尾布局飞行器的操纵解耦处理,更好地满足飞行器飞行任务的要求。
技术研发人员:张宁,白鹏,王荣,蒋增辉,刘传振
受保护的技术使用者:中国航天空气动力技术研究院
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!