基于半物理试验系统的非合作交会敏感器视场调整方法与流程
本发明涉及航天控制,特别涉及一种基于半物理试验系统的非合作交会敏感器视场调整方法。
背景技术:
1、空间飞行器间的交会接近、对接/捕获是空间站、在轨服务/维修的关键技术,空间交会释放及交会捕获任务,有一个由近及远以及由远及近的过程。近距离时因为目标飞行器近,因为视场范围大,要求敏感器大视场;远距离时,因为目标视场范围小,所以要求敏感器视场小。如果敏感器采用统一视场,则远距离大视场情况下探测灵敏度和精度降低,近距离而小视场则捕获概率降低,容易失去目标。
2、相关技术通常采用两种固定视场敏感器配合工作,一种是大视场的敏感器,负责近距离测量;一种是小视场敏感器,负责远距离测量。在该种方式中,为了实现测量任务的覆盖,需要在特定阶段进行两个敏感器的切换,导致控制系统及控制策略均较为复杂,不利于快速准确的完成交会任务。采用可变视场的非合作交会敏感器,可以兼顾距离和视场,并适应非合作目标,但敏感器的视场调节必须准确可靠。
3、因此,亟待需要一种基于半物理试验系统的非合作交会敏感器视场调整方法来解决上述技术问题。
技术实现思路
1、本发明实施例提供了一种基于半物理试验系统的非合作交会敏感器视场调整方法,可以准确调整敏感器视场,实现在轨非合作交会捕获。
2、第一方面,本发明实施例提供了一种基于半物理试验系统的非合作交会敏感器视场调整方法,包括:
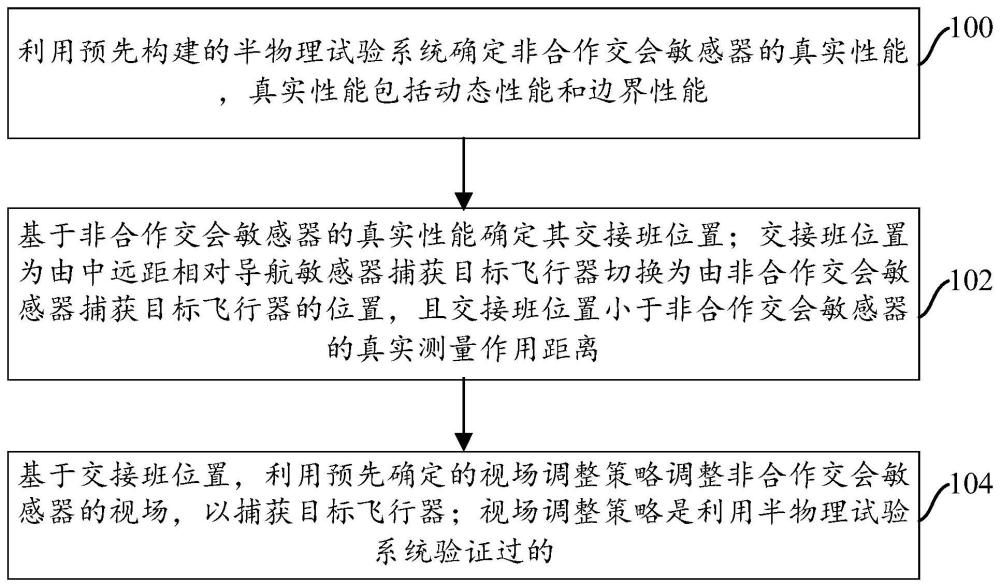
3、利用预先构建的半物理试验系统确定非合作交会敏感器的真实性能,所述真实性能包括动态性能和边界性能;
4、基于所述非合作交会敏感器的真实性能确定其交接班位置;所述交接班位置为由中远距相对导航敏感器捕获目标飞行器切换为由所述非合作交会敏感器捕获所述目标飞行器的位置,且所述交接班位置小于所述非合作交会敏感器的真实测量作用距离;
5、基于所述交接班位置,利用预先确定的视场调整策略调整所述非合作交会敏感器的视场,以捕获所述目标飞行器;所述视场调整策略是利用所述半物理试验系统验证过的。
6、第二方面,本发明实施例还提供了一种基于半物理试验系统的非合作交会敏感器视场调整装置,包括:
7、性能确定模块,用于利用预先构建的半物理试验系统确定非合作交会敏感器的真实性能,所述真实性能包括动态性能和边界性能;
8、交接班位置确定模块,基于所述非合作交会敏感器的真实性能确定其交接班位置;所述交接班位置为由中远距相对导航敏感器捕获目标飞行器切换为由所述非合作交会敏感器捕获所述目标飞行器的位置,且所述交接班位置小于所述非合作交会敏感器的真实测量作用距离;
9、视场调整模块,用于基于所述交接班位置,利用预先确定的视场调整策略调整所述非合作交会敏感器的视场,以捕获所述目标飞行器;所述视场调整策略是利用所述半物理试验系统验证过的。
10、第三方面,本发明实施例还提供了一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现本说明书任一实施例所述的方法。
11、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行本说明书任一实施例所述的方法。
12、本发明实施例提供了一种基于半物理试验系统的非合作交会敏感器视场调整方法。非合作交会敏感器动态性能和边界性能需要在相对真实的测量环境下进行确认,否则控制方法和敏感器性能不能做到最佳匹配,容易造成在轨任务失捕。本申请首先通过预先构建半物理试验系统,可以确定非合作交会敏感器的真实性能,如对不同材质目标飞行器的测量距离、不同扫描范围在不同距离上的捕获能力、不同相对位置、不同相对姿态及不同速度下的动态测量精度。然后,采用半物理试验系统对预先确定的控制策略进行验证,可以确定在实际交会时,目标飞行器与追踪飞行器在不同相对距离和姿态下,非合作交会敏感器使用何种扫描范围可以准确追踪并捕获目标飞行器。验证完成后,即可将该控制策略应用于实际飞控任务。由此可见,本申请通过半物理试验系统可以对非合作交会敏感器的真实性能和探测能力进行全面摸底,得到真实有效的控制策略。基于该控制策略可以准确调整敏感器视场,实现在轨非合作交会捕获。
技术特征:
1.一种基于半物理试验系统的非合作交会敏感器视场调整方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述预先构建的半物理试验系统包括:
3.根据权利要求2所述的方法,其特征在于,所述利用预先构建的半物理试验系统确定非合作交会敏感器的真实性能,包括:
4.根据权利要求3所述的方法,其特征在于,所述第一位置姿态换算关系和所述第二位置姿态换算关系是通过如下方式确定的:
5.根据权利要求3所述的方法,其特征在于,所述目标飞行器模拟器上设置有用于安装插板的卡槽,通过更换不同材质的插板改变所述目标飞行器模拟器的材质,以模拟不同材质的目标飞行器,从而确定所述非合作交会敏感器针对不同材质目标飞行器的动态性能和边界性能。
6.根据权利要求1所述的方法,其特征在于,所述预先确定的视场调整策略为:
7.根据权利要求2所述的方法,其特征在于,利用所述半物理试验系统验证所述视场调整策略的过程为:
8.一种基于半物理试验系统的非合作交会敏感器视场调整装置,其特征在于,包括:
9.一种计算设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1-7中任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行权利要求1-7中任一项所述的方法。
技术总结
本发明涉及航天控制技术领域,特别涉及一种基于半物理试验系统的非合作交会敏感器视场调整方法。方法包括:利用预先构建的半物理试验系统确定非合作交会敏感器的真实性能,真实性能包括动态性能和边界性能;基于非合作交会敏感器的真实性能确定其交接班位置;交接班位置为由中远距相对导航敏感器捕获目标飞行器切换为由非合作交会敏感器捕获目标飞行器的位置,且交接班位置小于非合作交会敏感器的真实测量作用距离;基于交接班位置,利用预先确定的视场调整策略调整非合作交会敏感器的视场,以捕获目标飞行器;视场调整策略是利用半物理试验系统验证过的。本申请可以准确调整敏感器视场,实现在轨非合作交会捕获。
技术研发人员:颜军,尹芳,苏畅,任焜,蔺玥,龚宇莲,郭泽,于立明,李川,肖静
受保护的技术使用者:北京控制工程研究所
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!