一种基于光导引的AGV小车控制方法及系统与流程
本发明涉及agv导航,具体涉及一种基于光导引的agv小车控制方法及系统。
背景技术:
1、agv有多种导航方式,如磁条导航、二维码导航、激光slam导航等。
2、地纹导航是一种新兴的导航技术,地纹导航通过记录地面纹理照片,将地面纹理数据作为比对数据,在导航过程中实时拍摄车辆下方地面的纹理照片并获取纹理数据,将获取的实时纹理数据与比对数据进行比对,在根据比对结果决定车辆的行进方向,从而实现对车辆的导航。
3、要实现agv地纹导航首先要录制地图,即控制agv小车沿设定的路线行走,agv小车一边行走一边拍摄记录地面纹理照片。在录制地图的过程中需要保证agv小车沿直线行走,且需要测量agv小车与目的地之间的距离。现有的操作方式是人工控制agv小车沿着直线行走,在此过程中需要人工目测车体航向偏转量并实时的纠正车体。上述操作方式人工成本较高,有待改进。
技术实现思路
1、基于上述表述,本发明提供了一种基于光导引的agv小车控制方法及系统,可以实现agv小车的车体偏移自动检测和航向自动纠正,无需进行目测判断和人工纠正。
2、本发明解决上述技术问题的技术方案如下:
3、一种基于光导引的agv小车控制方法,为agv小车划定直线行走路径;在录制地图前,在行走路径的终点安装激光发射器和反射板,使激光发射器朝向行走路径的起点,开启激光发射器并对台架装置的位置进行调整,使激光发射器发出的导引激光束与行走路径重合;在agv小车上安装测距传感器和相机模块,使测距传感和相机模块朝向将agv小车的前方,在相机模块的正前方设置半透光的薄膜;将agv小车移动至行走路径的起点,使agv小车朝向行走路径的终点,对agv小车的位置进行微调,使导引激光束刚好能够照射到薄膜的几何中心上,在此状态下测距传感器发出的测距信号能被反射板反射并且测距传感器能够接收到反射信号;随后开始录制地图,开启agv小车的自动行走功能,此时驱动控制器控制agv小车自动前进,在gav小车前进的过程中,相机模块实时拍摄薄膜的视频图像,每隔一段时间对视频图像进行分帧,提取当前帧图像,即获得目标图像;对目标图像进行二值化处理得到二值化图像,对二值化图像进行坐标化处理,接着对二值化图像的边缘轮廓和光点进行识别;将光点与薄膜几何中心的坐标横向距离转换为光点与薄膜几何中心的真实横向距离;再根据横向距离计算出纠正agv小车所需的左右轮轮速;控制agv小车的左右轮按照计算出的速度前进。
4、作为优选方案,左右轮速通过以下方式计算:
5、以双轮差速agv为例,定义:
6、k1为第一速度系数、k2为第二速度系数、left_velocity为左轮速度、right_velocity为右轮速度、velocity_demand为基准速度;
7、公式为k2=d/l*k1;式中d为真实横向距离,l为薄膜宽度的一半,k1采用分段pid取值,速度越快k1取值越小,速度时越慢k1取值越大,k1的最大值为1;
8、left_velocity=(1-k2)*velocity_demand;
9、right_velocity=(1+k2)*velocity_demand。
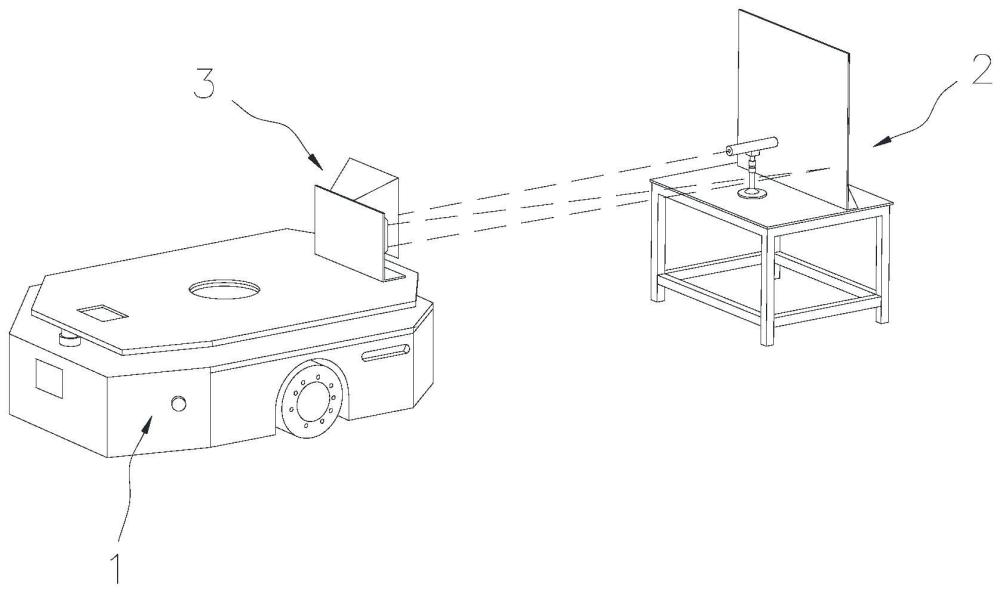
10、一种基于光导引的agv小车控制系统,用于执行所述控制方法,其特征是:包括布置在agv小车前方的台架装置、安装在agv小车上的感应装置、图像处理装置以及用于控制agv小车的驱动控制器;所述台架装置包括支撑架、激光发射器和反射板,所述激光发射器固定于支撑架上,且激光发射器朝向agv小车,所述反射板位于激光传感器的前方且反射板与支撑架固定;所述感知装置包括固定板、相机模块、测距传感器、支撑罩以及透光的薄膜,所述固定板与agv小车连接固定,所述测距传感器和相机模块均安装在固定板上,所述测距传感器和相机模块均朝向agv小车的前方,所述支撑罩罩住相机模块,所述薄膜覆盖住支撑罩的前端并与支撑罩的前端固定;所述图像处理装置包括图像存储单元、图像获取单元、预处理单元、特征提取单元和偏差计算单元;所述驱动控制器包括主控模块,还包括与主控模块连接的左轮驱动单元和右轮驱动单元。
11、作为优选方案:在录制地图的过程前,将台架装置布置在agv小车行走路径的终点,使激光发射器朝向行走路径的起点,开启激光发射器并对台架装置的位置进行调整,使激光发射器发出的导引激光束与agv小车的行走路径重合;将agv小车移动至行走路径的起点,调整agv小车的朝向使其正对台架装置,对agv小车的位置进行微调,使导引激光束刚好能够照射到薄膜的几何中心上,在此状态下测距传感器发出的测距信号能被反射板反射并且测距传感器能够接收到反射信号;随后开始录制地图,开启agv小车的自动行走功能,此时车辆控制器控制agv小车自动前进,在gav小车前进的过程中,相机模块实时拍摄薄膜的视频图像,视频数据被保存在图像存储单元中;每隔一段时间图像获取单元对视频图像进行分帧,提取当前帧图像,即获得目标图像;
12、预处理单元对目标图像进行二值化处理得到二值化图像,预处理单元对二值化图像进行坐标化处理;接着特征提取单元对二值化图像的边缘轮廓和光点进行识别;偏差计算单元将光点与薄膜几何中心的坐标横向距离转换为真实横向距离;偏差计算单元再根据横向距离计算出纠正agv小车所需的左右轮轮速,轮速通过以下方式计算:
13、以双轮差速agv为例,定义:
14、k1为第一速度系数、k2为第二速度系数、left_velocity为左轮速度、right_velocity为右轮速度、velocity_demand为基准速度;
15、公式为k2=d/l*k1;式中d为真实横向距离、l为薄膜宽度的一半,k1采用分段pid取值,速度越快k1取值越小,速度时越慢k1取值越大,k1的最大值为1;
16、left_velocity=(1-k2)*velocity_demand;
17、right_velocity=(1+k2)*velocity_demand;
18、接着偏差计算单元将计算得到的左右轮速发送给驱动控制器,再由驱动控制器控制左右轮的驱动电机,使左右轮按照计算出的速度前进,从而能对车体进行自动纠正,使车体沿着预设行走路径进行直线行走。
19、作为优选方案:该系统还包括与主控模块连接的左轮轮速传感器和右轮轮速传感器。
20、作为优选方案:该系统还包括通信模块,所述通信模块与主控模块连接。
21、作为优选方案:所述通信模块为wifi模块、zigbee模块、lora模块中的至少一种。
22、与现有技术相比,本申请的技术方案具有以下有益技术效果:通过上述方法可以实现agv小车的车体偏移自动检测和航向自动纠正,无需进行目测判断和人工纠正,可以省去人工操作,省时省力,降低agv小车录制地图过程中的人工成本,提高录制地图的效率。
技术特征:
1.一种基于光导引的agv小车控制方法,其特征是:为agv小车划定直线行走路径;在录制地图前,在行走路径的终点安装激光发射器和反射板,使激光发射器朝向行走路径的起点,开启激光发射器并对台架装置的位置进行调整,使激光发射器发出的导引激光束与行走路径重合;在agv小车上安装测距传感器和相机模块,使测距传感和相机模块朝向将agv小车的前方,在相机模块的正前方设置半透光的薄膜;将agv小车移动至行走路径的起点,使agv小车朝向行走路径的终点,对agv小车的位置进行微调,使导引激光束刚好能够照射到薄膜的几何中心上,在此状态下测距传感器发出的测距信号能被反射板反射并且测距传感器能够接收到反射信号;随后开始录制地图,开启agv小车的自动行走功能,此时驱动控制器控制agv小车自动前进,在gav小车前进的过程中,相机模块实时拍摄薄膜的视频图像,每隔一段时间对视频图像进行分帧,提取当前帧图像,即获得目标图像;对目标图像进行二值化处理得到二值化图像,对二值化图像进行坐标化处理,接着对二值化图像的边缘轮廓和光点进行识别;将光点与薄膜几何中心的坐标横向距离转换为光点与薄膜几何中心的真实横向距离;再根据横向距离计算出纠正agv小车所需的左右轮轮速;控制agv小车的左右轮按照计算出的速度前进。
2.根据权利要求1所述的基于光导引的agv小车控制方法,其特征是,左右轮速通过以下方式计算:
3.一种基于光导引的agv小车控制系统,用于执行所述控制方法,其特征是:包括布置在agv小车前方的台架装置、安装在agv小车上的感应装置、图像处理装置以及用于控制agv小车的驱动控制器;所述台架装置包括支撑架、激光发射器和反射板,所述激光发射器固定于支撑架上,且激光发射器朝向agv小车,所述反射板位于激光传感器的前方且反射板与支撑架固定;所述感知装置包括固定板、相机模块、测距传感器、支撑罩以及透光的薄膜,所述固定板与agv小车连接固定,所述测距传感器和相机模块均安装在固定板上,所述测距传感器和相机模块均朝向agv小车的前方,所述支撑罩罩住相机模块,所述薄膜覆盖住支撑罩的前端并与支撑罩的前端固定;所述图像处理装置包括图像存储单元、图像获取单元、预处理单元、特征提取单元和偏差计算单元;所述驱动控制器包括主控模块,还包括与主控模块连接的左轮驱动单元和右轮驱动单元。
4.根据权利要求3所述的基于光导引的agv小车控制系统,其特征是:在录制地图的过程前,将台架装置布置在agv小车行走路径的终点,使激光发射器朝向行走路径的起点,开启激光发射器并对台架装置的位置进行调整,使激光发射器发出的导引激光束与agv小车的行走路径重合;将agv小车移动至行走路径的起点,调整agv小车的朝向使其正对台架装置,对agv小车的位置进行微调,使导引激光束刚好能够照射到薄膜的几何中心上,在此状态下测距传感器发出的测距信号能被反射板反射并且测距传感器能够接收到反射信号;随后开始录制地图,开启agv小车的自动行走功能,此时车辆控制器控制agv小车自动前进,在gav小车前进的过程中,相机模块实时拍摄薄膜的视频图像,视频数据被保存在图像存储单元中;每隔一段时间图像获取单元对视频图像进行分帧,提取当前帧图像,即获得目标图像;
5.根据权利要求4所述的基于光导引的agv小车控制系统,其特征是:该系统还包括与主控模块连接的左轮轮速传感器和右轮轮速传感器。
6.根据权利要求4所述的基于光导引的agv小车控制系统,其特征是:该系统还包括通信模块,所述通信模块与主控模块连接。
7.根据权利要求6所述的基于光导引的agv小车控制系统,其特征是:所述通信模块为wifi模块、zigbee模块、lora模块中的至少一种。
技术总结
本发明涉及一种基于光导引的AGV小车控制方法及系统,其特征是:包括布置于AGV小车前方的台架装置以及安装于AGV小车上的感应装置;台架装置包括支撑架、激光发射器和反射板;感知装置包括固定板、相机模块、测距传感器、支撑罩以及透光的薄膜,固定板与AGV小车连接固定,测距传感器和相机模块均安装在固定板上,薄膜覆盖住支撑罩的前端。通过上述方法可以实现AGV小车的车体偏移自动检测和航向自动纠正,无需进行目测判断和人工纠正,可以省去人工操作,省时省力,降低AGV小车录制地图过程中的人工成本,提高录制地图的效率。
技术研发人员:王作昌,周睿锋,李大伟
受保护的技术使用者:法睿兰达科技(武汉)有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!